
水果无损采摘机械手工作空间分析及参数确定
2019-12-21 02:48刘燕德王观田王均刚舒盛荣
农机化研究 2019年4期
刘燕德,王观田,王均刚,舒盛荣
(华东交通大学 机电与车辆工程学院,南昌 330013)
0 引言
水果采摘机器人是一类以水果为工作对象、通过机器视觉和编程具有感知能力的农业机器人。采摘机器人能够提高采摘效率和采摘质量,保证果蔬及时采摘,大幅度降低果农的劳动强度和生产成本[1-2]。20世纪80年代开始,美国、日本、法国、荷兰等发达国家开始在收获机器人上做了大量的研究[3-7]。我国目前仍处于起步阶段,但随着技术的不断发展及我国许多科研院校的研究深入,也取得了一定的研究成果,同类型的采摘机器人也在不断地更新及本土化。
目前,机械手设计过程参数的确定没有理论依据,有时靠经验取得,势必造成设计不合理,影响机械性能。国内许多学者在机械手设计方面做了大量研究,但关于机械手参数的确定文章较少,更没有对参数确定的方法进行说明。工作空间的分析有图解法、数值法和解析法。图解法和解析法只适合于自由度及杆件数目较少的机械臂的工作空间分析,而数值法需要大量的计算,计算公式复杂多变。本文采用由数值法简化后结合随机数计算的方法(即蒙特卡洛法),具有计算量少及准确性高等优点[8]。
本文利用D-H法对机械手臂进行正运动学分析,在MatLab平台下用蒙特卡洛法计算机械手的工作空间,结合控制变量法,确定不同参数下的工作空间范围,根据相对较合理的工作空间范围,反推机械手臂的合理参数。
1 基于工作空间反馈确定水果采摘机械手关节参数的方法
水果采摘机械手的机构设计与采摘对象和工作环境密切相关,需根据要求确定机械手机构类型。自由度是衡量机械手柔软程度的尺度,表示机械手所拥有的独立运动的数量。机械手自由度数越多,灵活度越高;但同时机构也会变得越复杂,控制难度越大,质量越大。自由度的确定根据具体采摘环境和要求等多方面综合考虑。
1.1 机械手杆件参数确定方法
机械手的基本参数包括各手臂的长度及关节的转角范围,这些参数都关系到机械手工作空间的大小与形状。
手臂的长度即为连杆的长度,根据机器人学原理可知:机械手各连杆长度之和需要大于等于采摘范围的最大值,连杆总长度保持不变,工作空间大小也不变。所以,在确定机械手实际采摘范围后,就可确定机械手连杆总长。在各个连杆长度满足机械要求的情况下,遵循机器人学原理,机械臂类似人类手臂,大臂的长度与小臂和末端执行器的长度之和相等[9-10]。
1.2 机械手正运动学分析
正运动学分析是计算机械手作业空间的前提,正运动学方程为机械手臂工作空间的计算提供理论依据。Denavit和Hartenberg于1995年提出了一种为关节链中的每一杆件建立坐标系的矩阵方法,即D-H参数法。每个关节处都建立起自己的独立坐标,通过D-H坐标转换矩阵将手爪的坐标转换成基座的固定坐标,就可以得到手爪在固定坐标的位置。
根据D-H参数法相应两个连杆之间的坐标变换的通式为
nTn+1=An+1=Rot(z,θn+1)×Tran(0,0,dn+1)×Tran(an+1,0,0)×Rot(x,an+1)
(1)
工作空间是指机械手的自由端(末端执行器前端)在空间可移动的范围,也叫作业空间[11]。通过坐标转换后,机械手末端坐标系关于基座坐标系所有位置点的集合就是机械手臂的工作空间范围,这也是蒙特卡洛法的原理。对于机械手臂来说,变量为各关节的转动角度θ,各关节的转动角度确定后,机械手末端的位置就确定了;当所有关节转动角度在其取值范围内随机遍历取值后,所得到的末端点的集合就是机械手臂的工作空间范围。
蒙特卡洛法是一种通过随机取样的方式来解决数学问题的方法,可应用于研究随机物理现象。研究机械手末端到达空间的位置就可使用蒙特卡洛法,即机械手末端到达的某个空间位置是随机发生的,这样取得的随机样本就能够充分展示机械手的工作空间。机械手各关节在其相应的活动范围内工作,各个关节在其取值范围内随机取值后,机械手末端点就会有一个随机值的集合,这些值的集合就构成了机械手的工作空间。运用蒙特卡洛法计算工作空间的步骤如下:
1)对机械手进行正运动学分析,求得机械手末端的位置矩阵;
2)确定随机取样的样本数N,在计算机性能承受范围内取最大;
3)利用MatLab函数rand()取随机值,计算各关节在取值范围内的随机值,计算公式为
θi=θimin+(θimax-θimin)rand(N)
(2)
式中θi—关节i转动范围的随机值;
θimax—关节i转动范围的最大值;
θimin—关节i转动范围的最小值。
4)编写算法程序,在MatLab中绘制机械手工作空间点云图。
1.3 机械手关节参数确定方法
关节的转角范围关系到机械手末端能够到达的平面范围,根据采摘对象植株的生长情况,可以得到实际的工作空间;结合控制变量法,求出不同参数下的工作空间范围;根据相对较合理的工作空间范围,反推机械手臂的合理参数。机械手的工作空间必须覆盖实际的工作空间,以此确定所有参数。
图1 是本文确定关节转动范围的流程图。在确定机构类型和自由度后,应当选取合适的关节类型。本文根据反馈的思想,结合控制变量的研究方法,用MatLab描画不同摆动范围下的工作空间,根据采摘目标空间与该工作空间的对比,找出最合适的工作空间,以该工作空间对应的摆角范围为最佳摆角范围。

图1 基于工作空间反馈的水果采摘机械手关节参数确定方法流程图Fig.1 Flow Chart of Method for Determining Joint Parameters of Fruit Picking Manipulator Based on Work Space Feedback
具体的做法:选定一个变量,取不同的范围,其他变量固定为0。其他变量固定为0表示该关节一直处于初始位置,这样便使得其他变量对该变量的影响控制在最低,确保结果的正确性。每取一个变量值范围,就能描画一个工作空间,最后能够得到该变量不同范围下的有限个工作空间形态。
描画工作空间的前提是需要得到机械手末端在固定原点坐标下的空间坐标表达方式。本文采用D-H参数法得到每个杆件坐标系的矩阵。,得到式(1)所示矩阵。通过简化,得到机械手所有杆件坐标系的矩阵为
(3)
机械手末端相对于基座坐标的坐标系矩阵为
(4)
对每个工作空间做好标记,当找到符合要求的工作空间形态时,根据标记确定此工作空间的变量值范围,将其定为最终结果,接着确定下一个变量值范围。重复此过程,确定结果,直到所有变量都已选取,得到最终结果后,所有摆动关节的转角范围就确定了。机械手最难确定的参数已经确定,按此方法得到的参数描画的工作空间形态与采摘目标空间形态相似度较高。本文的方法解决了摆动关节摆角范围难确定的问题,同时解决了工作空间浪费的问题。
2 五自由度采摘机械手的运动分析与参数确定
五自由度机械手中包括:基关节,有1个旋转自由度;肩关节,有1个摆动自由度;肘关节,有1个摆动自由度;两个腕关节,腕关节1有摆动自由度,腕关节2有旋转自由度。
设定各关节的变量为θ1=θ2=θ3=θ5=0、θ4=90°,这样设变量后能更加直观地观察机械手臂的空间位置。
根据设定的关节变量做出的机械手臂各关节坐标系如图2所示。
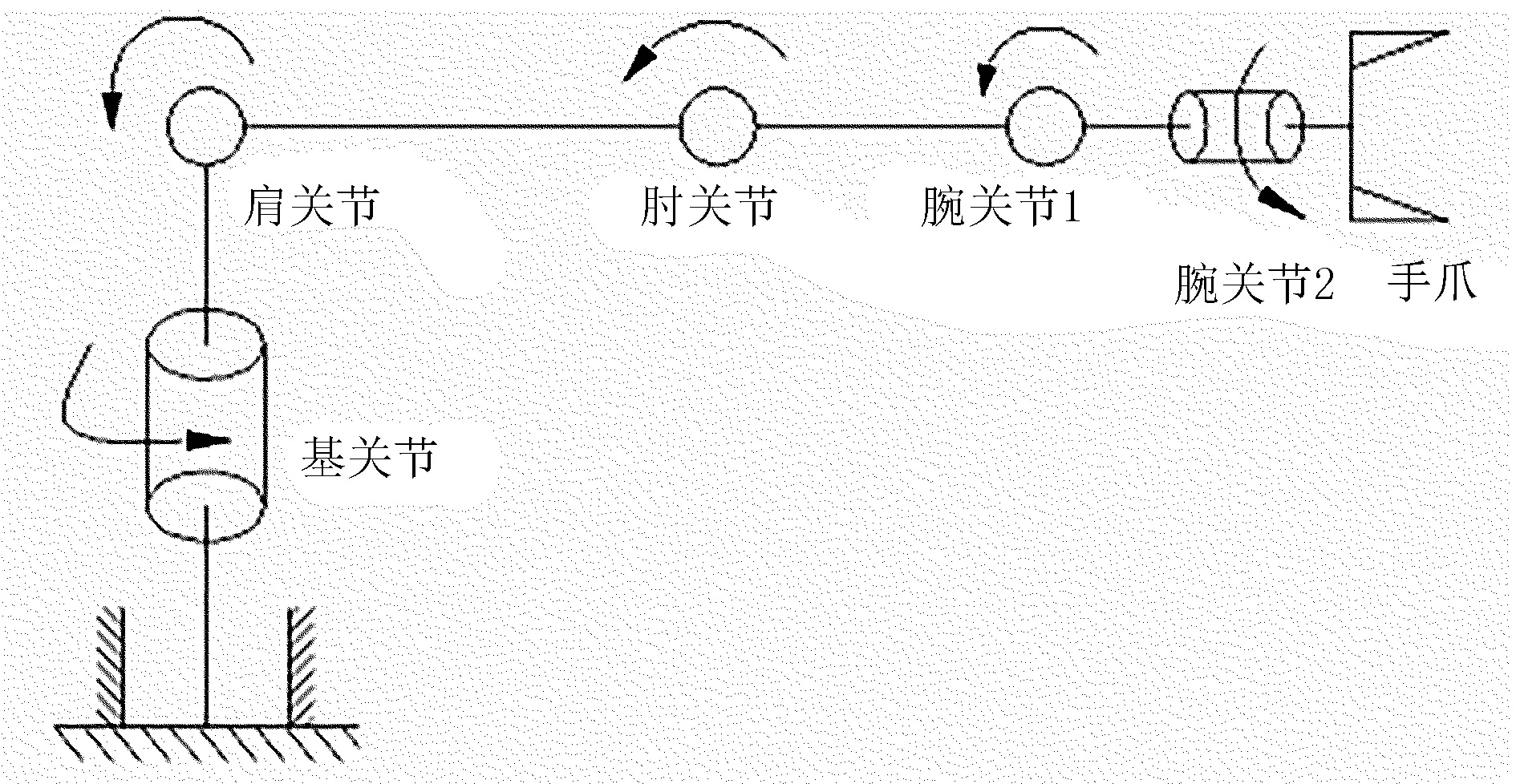
图2 机械手臂关节坐标图Fig.2 Coordinate Diagram of Manipulator Joint
根据连杆确定的D-H参数如表1所示。

表1 D-H参数表Table 1 D-H parameter table
将各个连杆的参数代入D-H法坐标变换的通式,则手爪相对于基座的坐标变换的矩阵为
将θ1=θ2=θ3=θ5=0、θ4=90°代入等式,得此时的位置矩阵为
Px=cosθ1(d5sinθ4cosθ2cosθ3-d5sinθ4sinθ2sinθ3+
d5cosθ4cosθ2sinθ3+d5cosθ4sinθ2cosθ3+
a3cosθ2cosθ3-a3sinθ2sinθ3+a2cosθ2)
Py=sinθ1(d5sinθ4cosθ2cosθ3-d5sinθ4sinθ2sinθ3+
d5cosθ4cosθ2sinθ3+d5cosθ4sinθ2cosθ3+
a3cosθ2cosθ3-a3sinθ2sinθ3+a2cosθ2)
Pz= sinθ4(sinθ2cosθ3+cosθ2sinθ3-d5cosθ4×
(-sinθ2sinθ3+cosθ2cosθ3)+a3sinθ2cosθ3+
a3cosθ2sinθ3+a2sinθ2+d1
(6)

根据设计要求和目标,结合相关机器人学原理,机械手臂连杆长度值确定如下:回转腰部(d1)为289mm,大臂(a2)为300mm,小臂(a2)为375mm,腕关节(d5)为100mm。摆动关节转角范围受机械手臂运动的限制,摆角范围不能定为全空间范围。为确定摆角范围,通过控制变量法,计算在不同摆角范围内机械手臂的工作空间范围,选取工作空间范围最合适时对应的摆角范围,定为该关节的摆角范围。由于计算机内存的限制,在此取4 000个点来描画工作空间。
计算机械手臂工作空间的步骤如下:
1)利用MatLab中rand函数求取各关节变量在取值范围内的随机值,rand(4000)函数将会在0~1内产生j个随机数。产生各关节变量在取值范围内的随机值,即
θi=θimin+(θimax-θimin)rand(4000)
(7)
2)将上面得到的随机值代入正运动学方程的位置矩阵,得到末端点关于基座坐标的坐标点集;将点显示在坐标上,就得到机械手臂工作空间点云图。
2.1 θ2变化时机械手的工作空间



图3 θ2取不同范围时的工作空间形态Fig.3 The Working Space of θ2 with Different Range
2.2 θ3变化时机械手的工作空间


2.3 θ4变化时机械手的工作空间


由工作空间形状图可知:此机械手的工作空间呈椭球状。x轴范围为(-800,,800),y轴范围为(-800,800),z轴范围为(-500,1 100)。仿真得到的工作空间完全覆盖实际工作范围,且工作空间的形状符合脐橙树中脐橙分布情况。使用本文方法可以得到合适的参数,解决了依靠经验确定参数导致工作空间浪费、影响机械性能等问题。

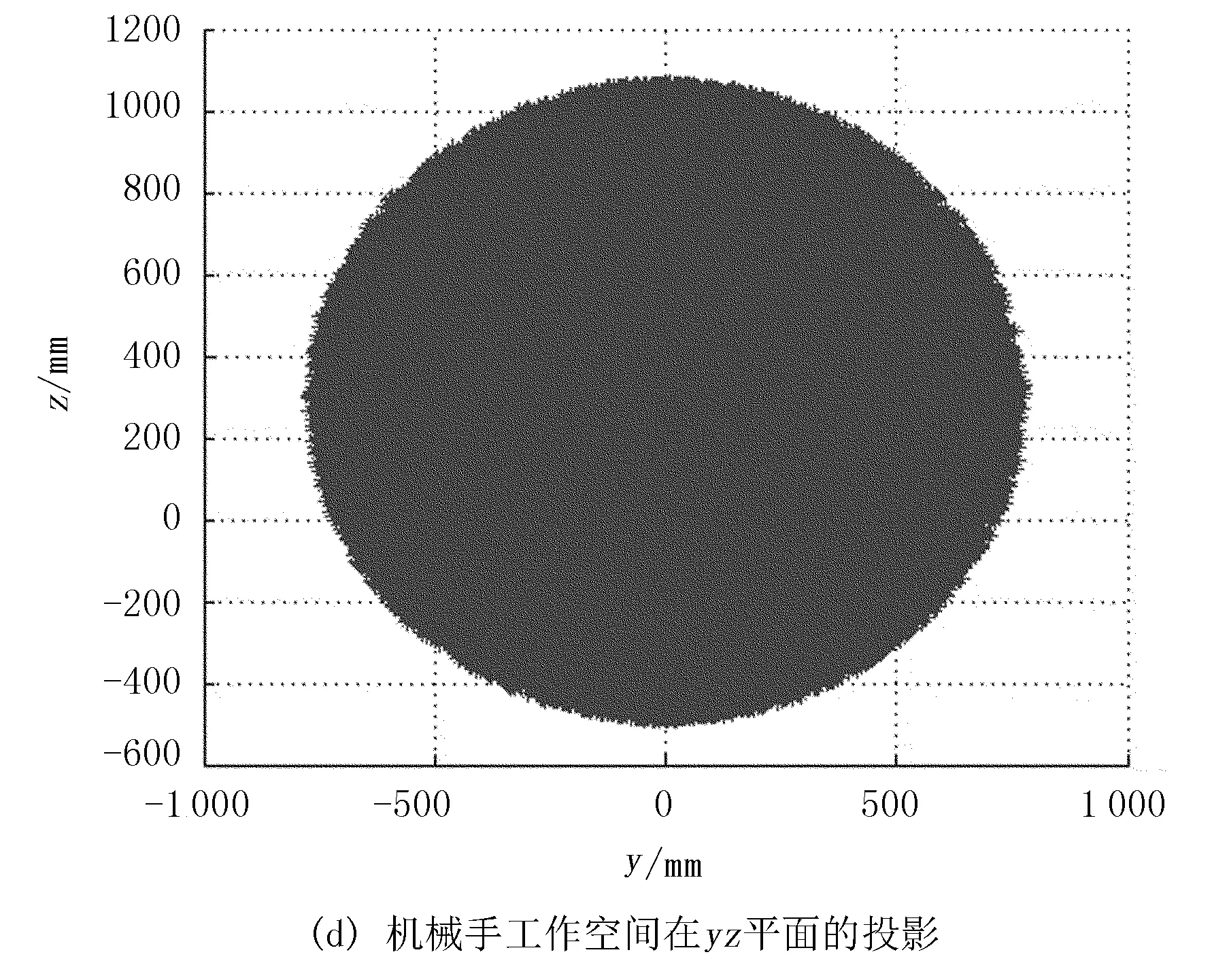
图4 机械手工作空间形态Fig.4 Workspace of Manipulator
3 结论
1)摒弃传统夹持式执行末端,采用切断的方式采摘,最大限度地减少对果实的损伤,提高采摘质量。使用旋转嘴将果实捞拢的方式使果实定位,同时设有临时储果仓,连续采摘数次后将果实放入指定框,可极大提高采摘效率。
2)关节转角范围关于转角原点对称。当转角范围取最佳转角对称的1/2时,工作空间范围相应是最大空间的1/2。转角范围越大,工作空间越大(肩关节除外)。当转角范围不是对称空间时,机械臂工作空间呈现不同的形状,而且空间大小会变化。
3)肩关节的转角存在最佳转角范围,即机械手工作空间在此范围内有最大值。转角范围增大并不会使工作空间增大,而转角范围减小会导致工作空间缩小。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
机电工程技术(2021年3期)2021-09-10
今日农业(2020年14期)2020-12-14
电子制作(2019年13期)2020-01-14
模具制造(2019年10期)2020-01-06
环球时报(2019-07-18)2019-07-18
少儿科学周刊·少年版(2015年4期)2015-07-07
娃娃画报(2009年11期)2009-12-07
母婴世界(2009年11期)2009-12-02
