
抚育机器人优化性设计—基于MatLab
2019-12-22 02:33秦丽娜
农机化研究 2019年6期
秦丽娜
(武汉商学院,武汉 430056)
0 引言
森林抚育是有效促进林木生长、提高林木产量及品质的有效措施之一。近年来,为加快我国森林业的发展,森林年轻苗种的抚育采伐逐年受到重视,用于森林抚育采伐的工具或设备整体性能水平亟待提高。为较好地提高工作效率与降低人工劳动强度,针对抚育机器人进行研究和开发势在必行。动作的精准定位与抚育控制决定抚育机器人工作效率的高低,而本课题在移动抚育机器人动态数学模型及路径规划不同控制算法的基础上,利用运动学结构分析及最优算法理论对抚育机器人的关键动作部件[1-2]进行优化设计。
1 动作部件优化设计模型
1.1 数学模型建立
进行抚育机器人动作部件的理论模型构建,首先要建立正确的运动坐标系(见图1),并结合正逆运动学方程[3]之间的转换机理(见图2),求解矩阵,则
Ti=Rot(z,θi)Trans(0,0,di)Trans(αi,0,0)
Rot(x,θi)=
在忽略不可避免的刚性影响因素前提条件下,对抚育机器人的动作执行部件的动态模型进行简化,则

(1)
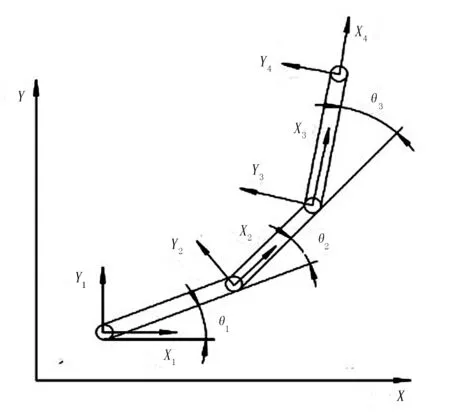
图1 抚育机器人动作部件坐标系简图Fig.1 Coordinate system brief diagram of the moving parts of the tending robot

图2 正逆运动学求解转换关系简图Fig.2 Simple diagram of the solving and transform relationship between the forward and inverse kinematics
式中n—广泛意义上的坐标系;
T—所建模型系统的动能;
Qi—广泛意义上的作用力;
U—相关势能函数变量;
D—相关耗散函数变量。
1.2 物理模型优化
抚育采伐机器人的工作过程:在驾驶控制室的识别检测与控制指令发出后,抚育机器人通过连接传递的传动部件,其动作部件如主臂、副臂及伸缩臂进行森林抚育作业。此过程中,各臂杆的结构与尺寸协调成为优化动作部件的核心。参照杨捷的基于MatLab平面机构分析与解析理论[4],利用绘图软件并根据机械机构的静态运动学、动态运动学等原理确定关键参数[5],给出三维模型优化简图,如图3所示。进行力学分析时,着重计算抚育机器人动作部件的作业速度、加速度及各臂杆所承受的惯性力与惯性力矩之间的联系,同时应考虑避开臂系的个别部位应力集中等现象[6],确保整个抚育动作部件各关节之间连接准确牢固,抚育作业顺畅高效。
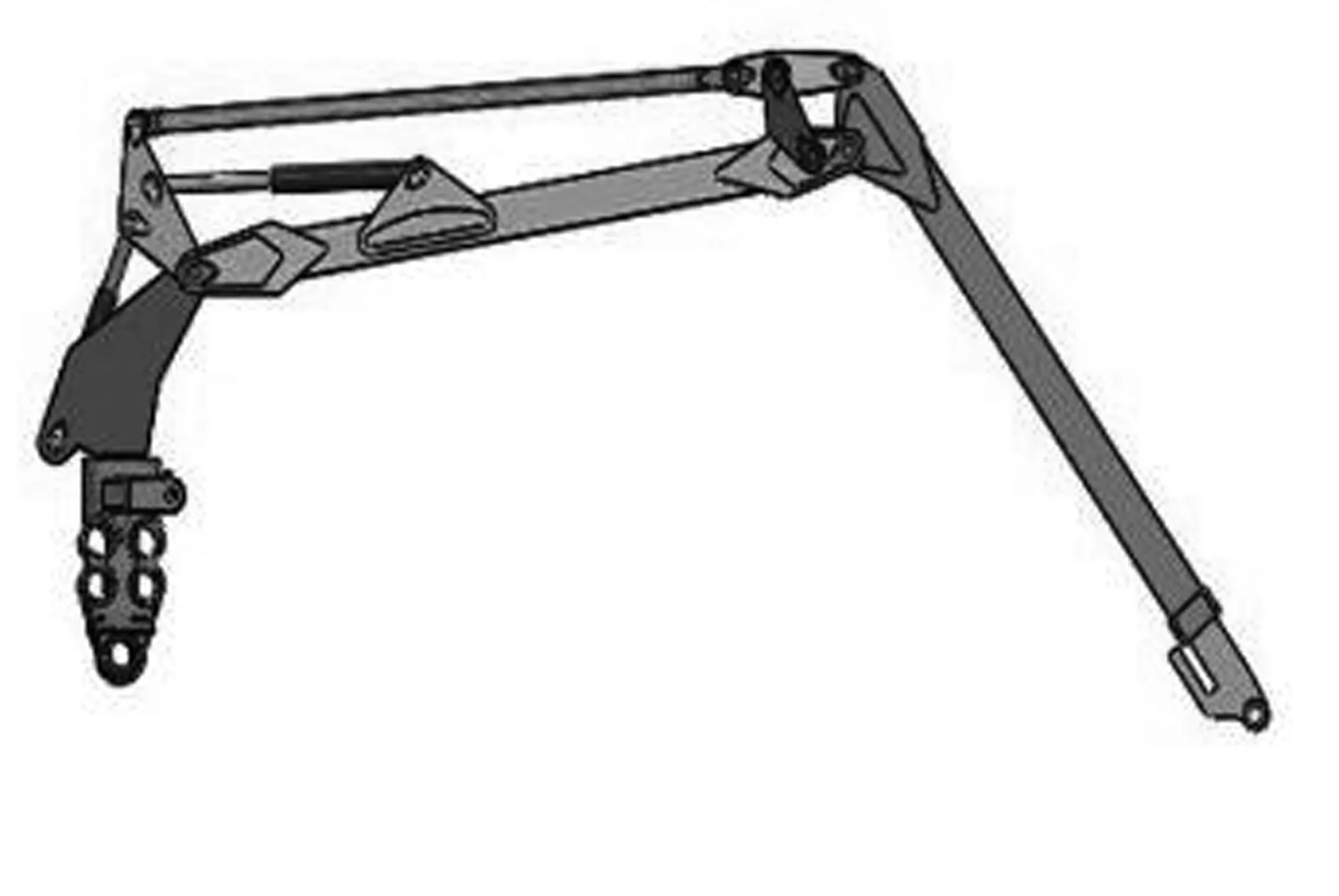
图3 抚育机器人动作部件三维模型简图Fig.3 3D model brief diagram of the moving parts of the tending robot
2 基于MatLab参数优化
2.1 系统硬件设计
智能抚育机器人的硬件主要由识别对象装置、传递感知及准确测量装置和控制执行主体部件等组成。图4为拟优化的抚育机器人动作部件结构框图。在改进机械机构系统之后,对智能控制的硬件进行选型与匹配测试,并输入相关软件程序进行调试作业。

图4 抚育机器人动作部件结构框图Fig.4 The structure diagram of the moving parts of the tending robot
在PWM调控之下,通过对各阀门控制的优化得出动作终端执行部件伺服马达的相关参数设置,如表1所示。结合CAN总线及上位机的功能,在控制电路的环境之下,基于MatLab[7],利用最小二乘法建立目标函数及给定约束条件,对各比例控制阀、转向控制阀等进行替换,以期达到最佳动作效果。

表1 抚育机器人动作终端执行部件参数设置表Table 1 The parameter setting table of the moving terminal execution part of the tending robot
2.2 系统软件程序设定
针对抚育作业环节的系统控制程序,在神经网络控制算法的基础上采用优化奖惩函数思想,选取RBF性能指标函数,对机械壁精细控制调节,并在其指导下执行动作,则
抚育机器人机械臂的运动控制算法流程简图,如图5所示。通过将预设目标位置与实际抚育作业动作部件的工作位置进行对比判别,进而执行不同的控制指令,达到智能调控目标。
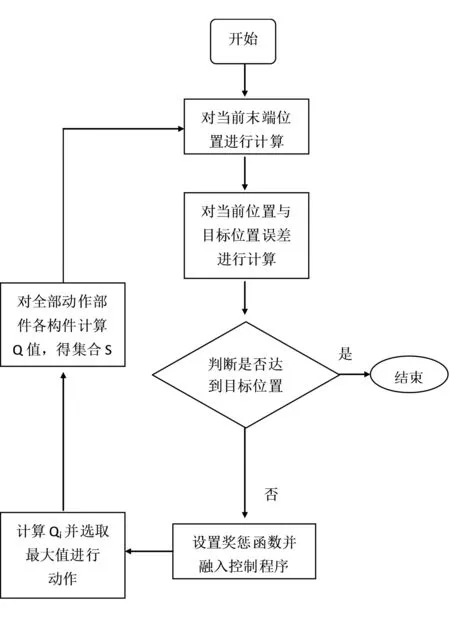
图5 抚育机器人动作控制算法流程图Fig.5 The flow chart of the moving control algorithm of the tending robot
同时,进行加权矩阵调节,融入自适应规律,使得控制更加精准化、高效化。其核心加权函数矩阵为

抚育机器人的动作部件主要执行立木、修整、伐木、运输及堆放等。根据其作业林地的直线、弧线与自主识别路径规划与避障[8]及机器人在行进工作中的平稳性条件[9],将所建仿真模型相关参数及数据输入MatLab,根据其专业仿真及计算功能,对各个作业环节进行系统软件化程序设置。部分程序段编写如下:
#include < Servo.h >
Servo servo1, servo2,
servo3, servo4;
int val1,val2,i,j,pos,
sensor1=1,sensor2=2;
void setup()
{
servo1.attach(5);
servo2.attach(2);
…
pinMode( sensor1,OUTPUT);
serial.begin(115200);
}
Void loop()
{
servol.write(80);
…
i=analogRead( sensor1);
val1=(6950/(i-3))-4;
if(val1==12)
{
for(pos=80;pos<=114;pos+=1)
{
servo1.write(pos);
delay(30);
…
}
…
3 动作部件试验仿真
在MatLab软件环境下利用Robotics Toolbox进行动作部件试验仿真[10],进行最优值求解前将前提条件与关键参数值按照仿真要求设置完毕,力求与森林实地作业环境相似及给定抚育作业要求相同;针对动作部件的运动角度进行输出数据记录,通过将核心算法[11-14]与运动学求解互补,有效避免求解过程中的奇异点现象,可以整体把握仿真效果,提高运算速度。由图6可以看出:动作参数θ3的试验值与期望设计值吻合较好。

图6 动作部件θ3试验与期望值输出效果对比Fig.6 The output effect comparison between the testing and the expected values of the moving pact θ3
试验仿真过程中,对动作部件进行实时轨迹跟踪,绘制轨迹跟踪的对比图。在给定路径运作时,仿真模型可做到准确化执行。由图7可以看出:在初期动作部件执行动作存在一定的机械误差,不影响整体对比;后期两者具有较强的吻合性,误差范围控制在5%左右,验证了优化部件的可行性。
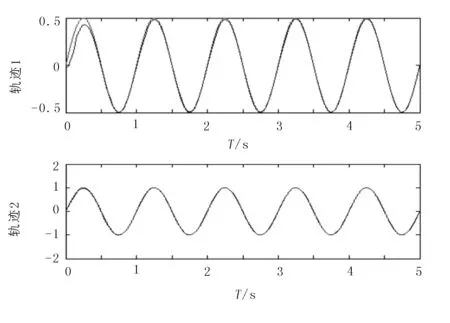
图7 抚育机器人动作部件仿真轨迹跟踪对比图Fig.7 The contrast figures of simulation trajectory tracking about the moving parts of the tending robot
4 结论
1)通过分析抚育机器人动作部件的作业原理、构件组成及各关节间的衔接条件,建立关键部件机械臂的三维仿真模型,并将机械臂控制的硬件如伺服马达等进行参数优化。在传感控制及识别技术的基础上,借助于控制核心算法、奖惩函数及MatLab工具等完成动作部件的仿真运行,并验证各环节优化的合理性与仿真的可靠性。
2)此优化抚育机器人的方法对森林抚育设备的其他控制部件改善有一定的借鉴作用,可对森林抚育机器人的运动轨迹规划与智能准确控制提供发展方向和理论应用基础。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
选煤技术(2022年2期)2022-06-06
南方农业(2021年3期)2021-12-27
花卉(2021年14期)2021-12-06
农村实用技术(2021年1期)2021-12-02
农民致富之友(2019年28期)2019-10-21
电子制作(2019年15期)2019-08-27
北京航空航天大学学报(2017年1期)2017-11-24
冰雪运动(2016年5期)2016-04-16
空间控制技术与应用(2015年4期)2015-06-05
