典型车载仪器设备的基本隔振系统优化匹配与隔振特性分析评价
2020-01-11 02:19吕振华
车辆与动力技术 2019年4期
吕振华, 张 鸿
(清华大学 车辆与运载学院,北京 100084)
特种无人越野车辆等机动装备的振动冲击直接影响车载仪器设备的运行稳定性和基本工作性能,而且会导致仪器设备出现多种故障与损坏.因此,车载精密电子、光学仪器设备的工作性能与耐久性的保持必需有优良的隔振缓冲系统,隔振缓冲系统匹配设计是车载仪器设备系统应用中的重要技术.虽然关于一般精密仪器设备隔振缓冲的基本要求及重要性是比较明确的[1-2],但国内外至今发表的有关车载仪器设备隔振技术的研究工作尚很少,只有一些关于卫星、无人机系统等的相关研究工作.文献[3]为卫星的力矩陀螺执行器设计了汇聚式的被动式隔振方案,对其六自由度振动传递率进行了参数优化;文献[4]以某小型无人机在地面滑跑振动过程中机载相机的垂向加速度与俯仰角位移均方根值为控制目标,对相机安装位置及其隔振器参数等进行了优化;文献[5]针对一种星载制冷机的被动隔振系统进行了正弦扫频、随机激励和脉冲激励试验,测试了其在发射和在轨状态下的隔振性能;文献[6-8]进行了基于压电式材料的自适应隔振系统在无人机图像采集系统等的应用研究,对其模式控制器进行了硬件在环测试.
文中针对两种不同类型的车载精密仪器设备,进行了其基本隔振系统优化匹配过程及分析评价方法探讨,给出了初步的匹配设计方案.
1 仪器设备隔振系统的初步方案设置与分析
选取某型激光雷达和多光谱摄像机组作为隔振对象,下文简称为设备1和设备2.首先定义表示仪器设备安装基座的全局坐标系O-XYZ和位于仪器设备质心的局部坐标系Oi-XiYiZi.考虑到仪器设备-隔振系统的固有振动频率一般较低,可忽略设备的结构弹性,将每个设备考虑为具有6自由度的刚性体,通过设备的局部坐标系相对于全局坐标系的平动位移与转动角度广义坐标q=[x,y,z,α,β,r]T来定义设备的位置和运动状态.相应地对设备的每个隔振器定义其局部坐标系Oj-XjYjZj.
1.1 仪器设备隔振系统的布置方案及其固有振动特性分析
为质量较小的设备1设置了3点悬置的隔振器布置方案,两个在底部,一个在上部.后者有利于限制俯仰振动;为体积较大的设备2设置了4点悬置,分置于四周,因受到空间限制,该隔振系统的弹性中心比设备质心低.
每个设备的各个隔振器的位置及其三向刚度是隔振系统的设计变量,根据设备的结构与质量分布的对称性,可以将部分隔振器对称布置,从而减少了设计变量.以设备2为例,其隔振系统的初步布置方案如图1所示,设隔振器1、2的位置不对称但同向的刚度相等,隔振器3、4的位置对称、同向的刚度相等,则隔振系统的独立设计变量只有12个(6个位置参数、6个刚度参数).

图1 设备2初始隔振器布置及位置因素示意
采用正交试验方法进行隔振系统的参数优化,优化目标为系统的刚体振动模态频率带宽和最高阶模态频率均极小化.首先对设备1和设备2的隔振系统初步布置方案分别进行固有振动特性试算,将其振动模态频率带宽分别压缩到了6.7 Hz、3.3 Hz,相应的设计变量值即可作为系统优化设计的初值,在其基础上进行适当的变动,即可进行多因素、多水平的正交试验优化计算分析.设备2的12个设计变量的初始值表示为{df,,dLR,hf,hLR,dr,hr,kx,fr,kx,LR,ky,fr,ky,LR,kz,fr,kz,LR} = {160, 160, 190, 90, 160, 190, 18, 12, 12, 11, 15, 13.2},其中:h、d、k分别表示隔振器的高度、水平位置和刚度,单位分别为mm、mm、N/mm,下标f、r表示前、后,下标L、R表示左、右.将设计变量(因素)的初值作为中间水平,在此基础上变动±20%给出另两个水平,选取了13因素、3水平的正交表L27(313)[9-10]进行试验优化,具体的正交试验方案见表1.表1的后两列给出了各个试验方案的优化目标函数计算结果,即系统的最高阶模态频率fMax和6阶刚体振动模态频率的带宽fBand.可见,在第8次试验中,fMax和fBand均达到了最小值,fBand仅为1.3 Hz,因此,将该试验方案的参数配置作为设备2隔振系统的设计方案.经过优化后的设备1、设备2的隔振系统模型如图2所示.
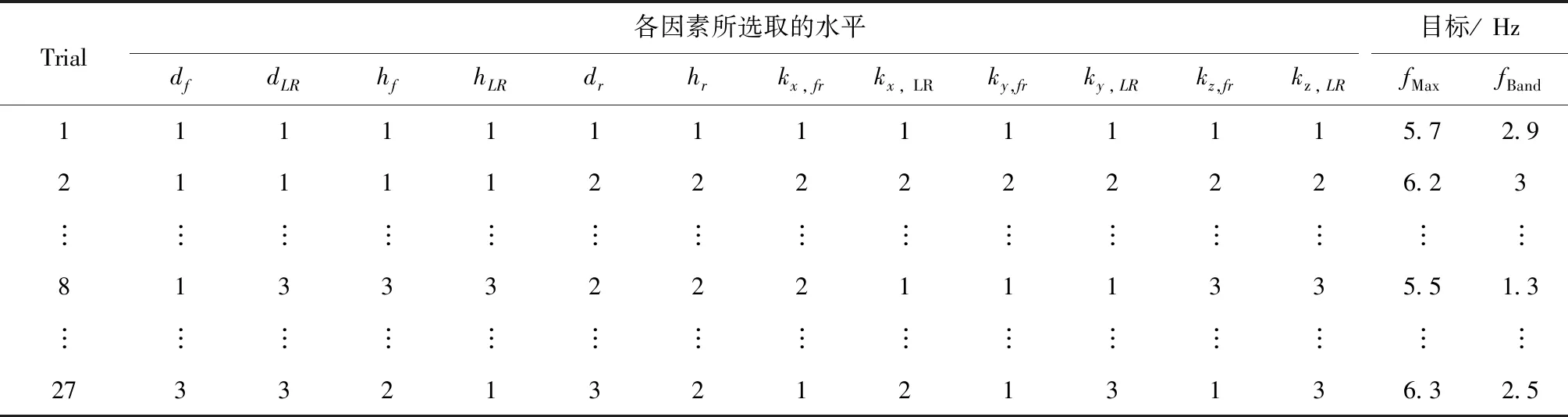
表1 设备2隔振系统设计的正交试验方案表及其试验结果(部分)

图2 优化后的设备1、设备2隔振系统模型
1.2 仪器设备隔振系统的振动传递特性分析
对设备1、设备2隔振系统进行振动传递率分析,亦即计算在基础的垂向(Z)、俯仰(Ry)、侧倾(Rx)振动激励下设备的相应振动响应的幅值比例~频率特性,结果见图3,部分统计数据见表2、表3.
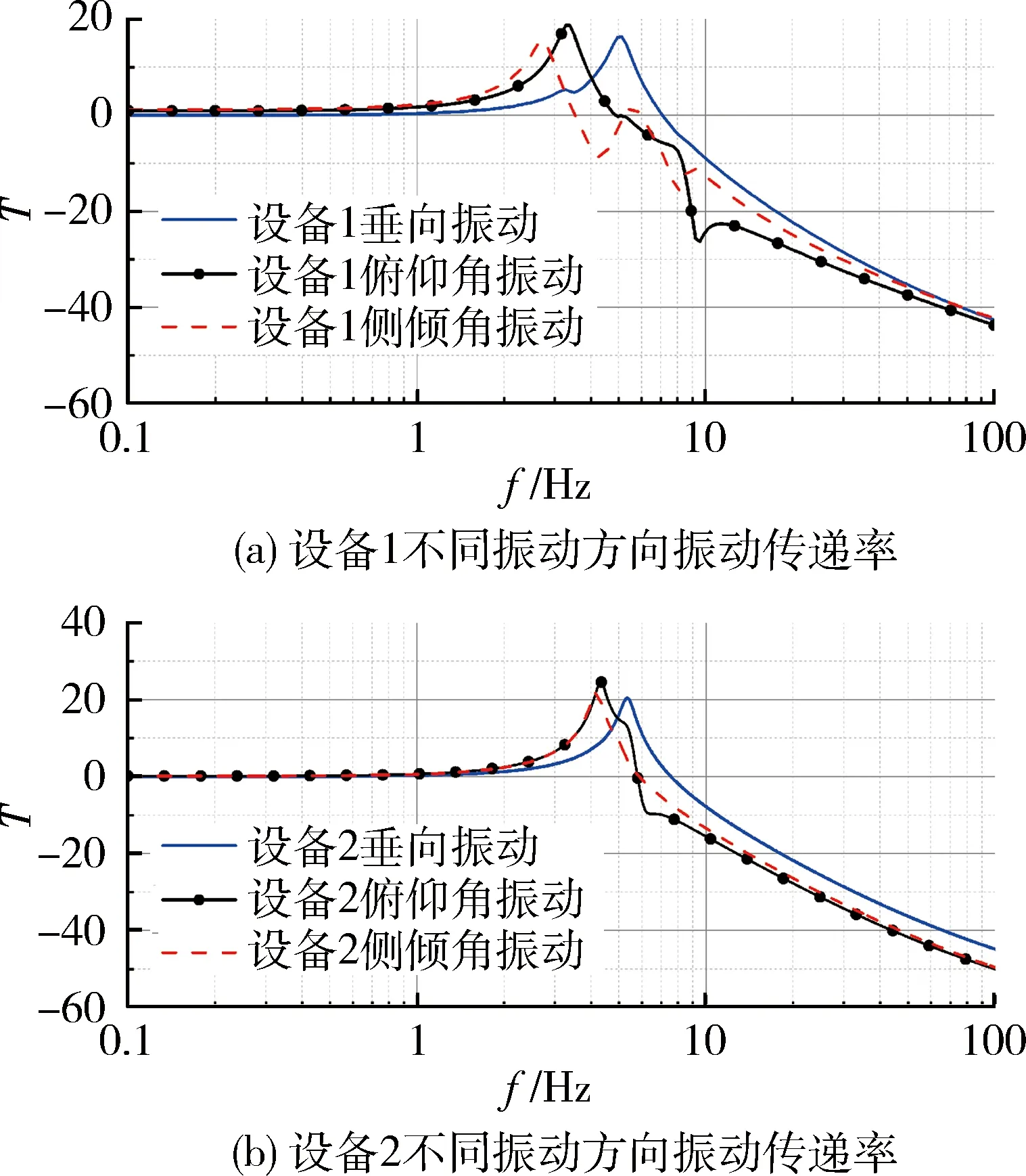
图3 设备1、2隔振系统振动传递率函数
以设备1为例,隔振系统的3个主要振动模态的频率在2.7~5.1 Hz之间,该范围内的振动激励会激起设备的较大共振响应;通过共振区后,俯仰振动角位移传递率在6.7 Hz降低至50%,且继续快速衰减,在约8.7 Hz即降低至10%以下,表明对俯仰振动的隔离效果很显著;垂向振动位移传递率特性曲线的衰减速率则较慢,分别在8.8 Hz、17.2 Hz衰减至50%、10%;侧倾振动角位移传递率特性曲线的衰减速率介于上两者之间,分别在6.6 Hz、13.5 Hz衰减至50%、10%.

表2 设备1隔振系统振动传递率函数特征点统计

表3 设备2隔振系统振动传递率函数特征点统计
2 整车多体动力学分析模型建立与验证
应用多体动力学分析软件建立了一种轻型越野车的整车多体系统动力学模型,如图4所示,包括前悬架、后悬架、车轮及轮胎、转向系、车身、动力总成、车载仪器设备等子系统动力学模型,其中设备1、设备2分别安装在车前端和车顶.整车模型总质量为3 070 kg、轴距为3 227 mm.
为检验所建立的整车多体系统动力学模型,可进行基本的振动响应特性分析,即地面脉冲激励和随机激励的振动响应特性分析.

图4 整车多体系统动力学模型
(1) 地面脉冲激励的振动响应分析
对整车多体动力学模型进行地面脉冲激励虚拟试验,车辆以18、36、54、72 km/h等多种速度通过有半径100 mm的半圆凸坎的路面.图5给出了以36 km/h速度驶过凸坎时,车身质心垂向振动及俯仰角振动位移响应-时间历程及其频谱,两种典型振动响应量的衰减规律和所反映出的整车簧载质量刚体的垂向振动、俯仰角振动固有频率(分别为约1.1 Hz、1.3 Hz)均符合汽车振动特性的一般规律.

图5 车体质心垂向位移和俯仰角位移响应及其频谱
(2) 地面随机激励的振动响应分析
对整车多体动力学模型进行地面随机激励虚拟试验,车辆以18、36、54、72 km/h的速度通过C级和D级标准化随机路面.由图6、7所示,车体垂向振动和俯仰角振动响应量随路面粗糙度、车速的变化规律是合理的;车身垂向振动位移的频谱的主要部分为反应路面宏观高程激励的约0.1 Hz的低频分量和约1.2 Hz的与车体垂向振动固有频率一致的分量;车身俯仰角振动的主要频率成分集中在1.3 Hz处,也与其俯仰角振动固有频率相一致.

图6 车体垂向振动位移及其频谱
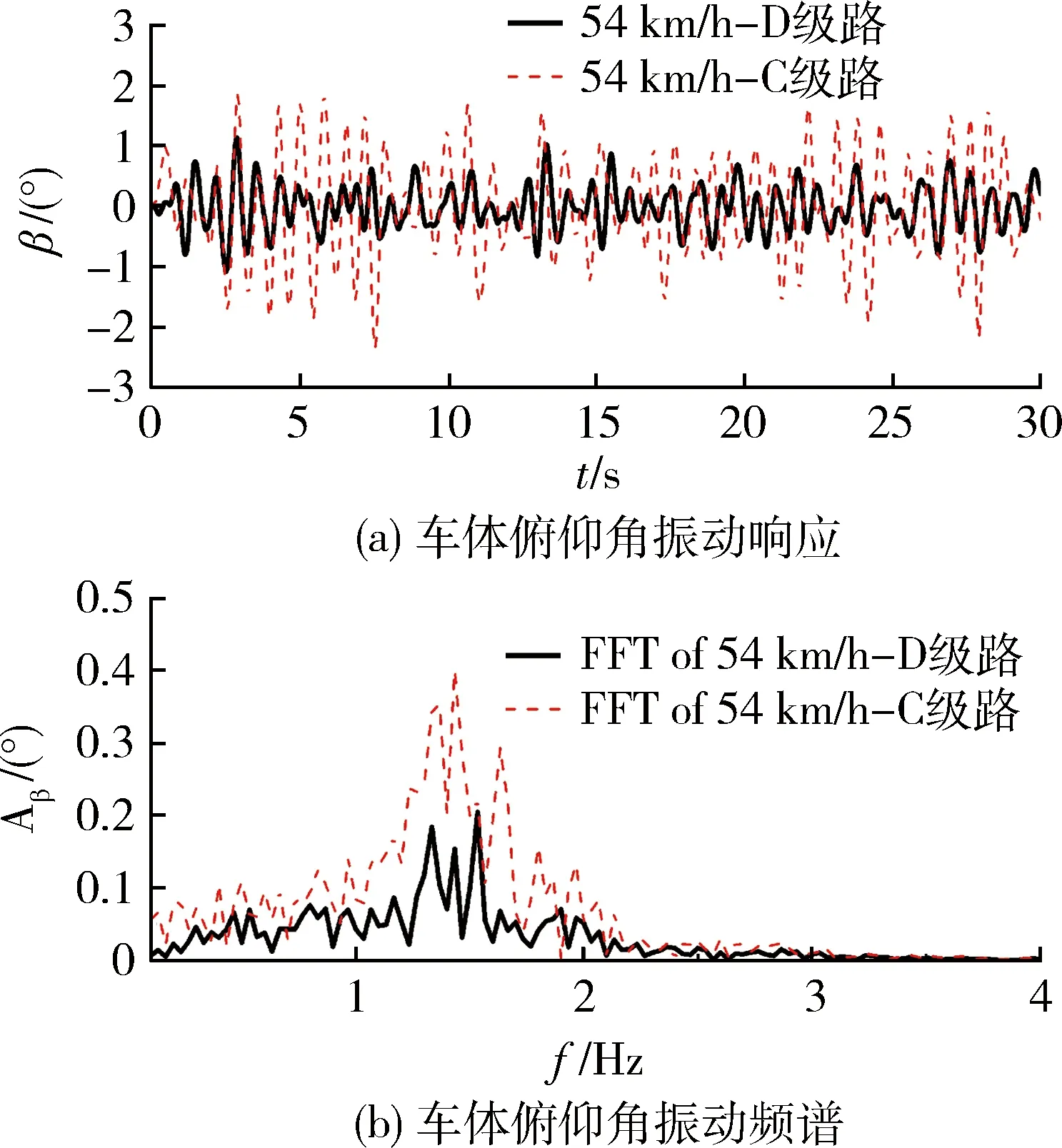
图7 车体俯仰振动角位移及其频谱
3 车载仪器设备隔振特性分析
为了评价车载仪器设备的隔振系统在实车状态的隔振效果,应对整车振动系统中车载仪器设备的总振动传递率、整车行驶振动激励下车载仪器设备在隔振频率区的振动响应特性等进行分析.
(1) 整车振动系统中车载仪器设备的总振动传递率分析
定义以下3种不同的整车模拟振动激励方式,进行正弦波扫频激励:①四车轮同相的垂向振动位移激励方式,主要激发整车的垂向振动;②两前轮同相位、两后轮也同相位、但前轮与后轮反相位的垂向振动位移激励方式,主要激发整车的俯仰角振动;③两组同侧车轮均同相位、但左侧与右侧车轮反相位的垂向振动位移激励方式,主要激发整车的侧倾角振动.
整车振动系统中车载仪器设备的总振动传递率计算结果示例如图8所示.设备1的3种振动传递率函数特性表明,采用隔振系统后,其垂向振动位移传递率在约10 Hz,即降低至10%(而无隔振系统时,直到16.5 Hz才降低至10%),同时,在10 Hz之后,振动传递率衰减速率更大,其隔振效率的优势在高频段更加明显.
设备2的3种振动传递率函数特性表明,采用隔振系统后,其主要振动传递率在约9 Hz就全面小于无隔振系统的振动传递率,其中,垂向振动传递率在7.6 Hz就降低至10%,而无隔振系统时,直到17 Hz才降低至10%.因此,设备2的隔振系统对高频振动的衰减很显著,从而对其内部精密元件的寿命和光学元件的工作性能的改善都可起到重要的作用.

图8 设备1质心垂向振动传递率特性比较
(2)整车行驶振动激励下车载仪器设备在隔振频率区的振动响应特性分析
汽车的主要高频振动激励源有发动机、传动系和底盘系统等,或当汽车行驶于特殊的不平路面时.为简化计算过程,现设汽车分别以8 m/s、12 m/s、16 m/s、20 m/s的速度在波长为1 m、幅值为25 mm的试验路面行驶,典型的振动响应结果如图9所示.在不同车速下有、无隔振系统时设备1的垂向振动和设备2的俯仰角振动响应的统计结果见表4、表5.

表4 不同车速下设备1有、无隔振系统时的垂向振动响应峰-峰值统计
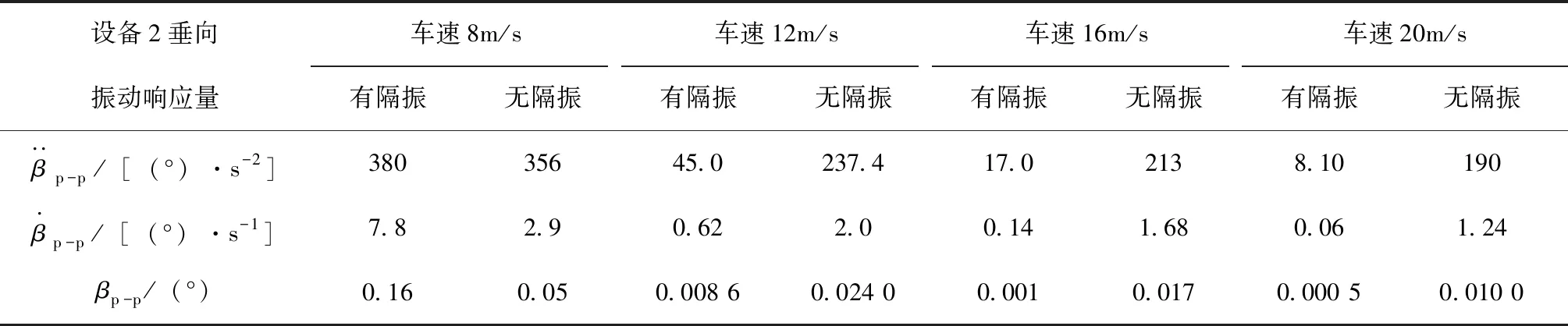
表5 不同车速下设备2有、无隔振系统时的俯仰角振动响应峰-峰值统计
这些振动响应统计分析结果表明,车载仪器设备的隔振系统的减振特性符合前文所示的设备1、2振动传递率特性,尤其垂向振动响应从8 Hz开始即有明显的衰减,在20 Hz时,已衰减至约10%;对于设备2的俯仰角振动响应,开始衰减的频率下限略高些,但在20 Hz时,已衰减至约5%;对于设备1的俯仰角振动响应的衰减效应则直到16-20 Hz之间,才开始出现.

图9 以8 m/s速度通过试验路面时设备2的垂向振动、俯仰振动角位移响应
4 结 论
隔振缓冲系统匹配设计是车载仪器设备系统应用中的重要技术.对某型激光雷达(设备1)和多光谱摄像机组(设备2)进行了隔振系统匹配及其固有振动特性的正交试验优化,取得优良的结果,如设备2隔振系统的最高阶模态频率和6阶刚体振动模态频率的带宽分别极小化为5.5 Hz、1.3 Hz,从而可使其具有良好的振动传递率特性.
基于一种轻型越野车的整车多体系统动力学模型,进行了整车振动系统中车载仪器设备的总振动传递率计算分析,设备1、设备2的隔振系统的垂向振动位移传递率分别在约10 Hz、7.6 Hz即降低至10%;同时,进行了整车行驶振动激励下车载仪器设备在隔振频率区的总体振动响应特性计算分析,进一步量化评价了车载仪器设备的隔振系统在实车状态的隔振效果.
文中关于车载仪器设备的基本隔振系统优化匹配极其隔振特性分析评价的方法与流程具有普遍的适用性.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年10期)2022-06-09
潍坊学院学报(2021年2期)2021-07-22
山东水利(2020年12期)2021-01-18
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
资源节约与环保(2018年1期)2018-02-08
中国公共安全(2017年11期)2017-02-06
中国教育技术装备(2015年19期)2015-03-01
噪声与振动控制(2015年4期)2015-01-01