
工业无线网络的智能搬运机器人实验平台设计
2020-01-13 09:48邓小宝史运涛李小虎胡子佳
实验室研究与探索 2019年12期
李 超, 邓小宝, 史运涛, 李小虎, 胡子佳
(北方工业大学 现场总线技术及自动化北京市重点实验室,北京 100144)
0 引 言
随着科技的发展,搬运机器人在智能制造领域的应用越来越广泛,生产过程对于搬运机器人的要求越来越高。传统离线编程的搬运机器人按照固定路径进行工作,当生产环境发生变化时,需重新编程以适应新环境,适用性不足。
近年来,双目视觉技术日益成熟,各种测距、定位算法不断优化,测距和定位的准确度不断提升[1-5]。工业无线可以降低现场的布线成本,提升空间利用率,同时工业无线传输机制不断发展,工业无线的可靠性不断提高[6-8]。为提升搬运机器人的智能化程度和可靠性,增强学生对搬运机器人和视觉技术的应用能力,本文根据企业实际生产需求,结合实验室承担科研项目,将双目视觉应用于搬运机器人[9-12],使用PLC作为搬运机器人的主控制器,同时利用工业无线实现搬运机器人和控制中心之间的数据交互,设计开发了该智能搬运机器人实验平台。实验证明,该实验平台可综合锻炼学生处理复杂工程问题的能力。
1 系统整体方案设计
该实验平台由智能搬运机器人和控制中心两部分组成。智能搬运机器人完成目标物识别、测距、抓取和搬运功能,控制中心完成对智能搬运机器人的监控。通过位于控制中心的无线接入点(AP)和位于智能搬运机器人的无线客户端实现无线通信,进而实现智能搬运机器人和控制中心的数据交互,同时将实验环境视频数据传输到视频监控站。系统整体架构如图1所示。

图1 系统整体架构图
2 系统硬件设计
2.1 智能搬运机器人
智能搬运机器人由全向移动平台、机械臂、PLC、树莓派、双目摄像头、无线客户端、交换机、IP摄像头和电源模块构成。全向移动平台采用3个麦克纳姆轮,以实现全向移动功能;PLC可靠性高、抗干扰能力强,S7-1200 PLC通过RS-232通信控制xArm机械臂和全向移动平台[13-14],并完成与Raspberry Pi3 B+(树莓派)的数据交互;使用Raspberry Pi3 B+提供Python编程环境,编程实现目标物识别和测距功能;通过kingcent双目摄像头获取图像;无线客户端SCALANCE W734、沃仕达IP摄像头和S7-1200 PLC通过工业以太网线接入SCALANCE XB208二层交换机。智能搬运机器人结构如图2所示,图中A、B、C、D、E、F、G点对应各个模块的安装位置;智能搬运机器人实物如图3所示。
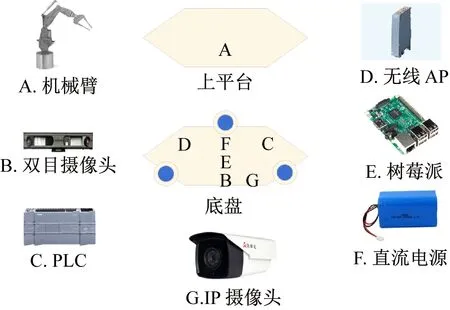
图2 智能搬运机器人结构图

图3 智能搬运机器人实物图
2.2 控制中心
控制中心由HMI、PLC、无线AP、交换机和视频监控站构成。HMI实现人机交互功能,选型为KTP700 Basic。S7-1200 PLC和HMI连入同一子网,完成对智能搬运机器人的监控功能[15-16];选用SCALANCE W774作为无线AP,在实验室中,为保证无线AP和无线客户端之间的通信质量,W774和W734均选用IEEE 802.1n协议,使用5G Hz通信频段;采用SCALANCE XB208二层交换机扩展以太网接口。
3 系统软件设计
系统软件分为下位机部分和双目视觉部分,下位机程序完成接收双目视觉数据、控制机械臂和全向移动平台功能;双目视觉程序完成目标物识别和测距功能。智能搬运机器人工作流程如图4所示。
3.1 下位机程序设计
S7-1200 PLC控制程序设计如下:阈值设定为智能搬运机器人抓取目标物时的最佳距离,在本次实验中阈值设置为22 cm。当智能搬运机器人与目标物距离大于阈值时,PLC通过RS-232发送数据帧控制移动平台移动;当智能搬运机器人与目标物距离小于或等于阈值时,智能搬运机器人停止移动。根据不同的抓取距离,为机械臂编制不同的动作组,并将不同动作组的数据存放到PLC的数据块中。当PLC接收到双目视觉提供的目标物颜色和距离信息时,将对应的动作组数据通过RS-232发送给机械臂,控制机械臂抓取目标物。

图4 智能搬运机器人工作流程图
将控制中心S7-1200 PLC设为IO控制器,将智能搬运机器人S7-1200 PLC设为IO设备,建立智能传输区实现两台PLC变量之间的工业无线连接,通过S7通讯方式实现数据交互。
3.2 双目视觉程序设计
以不同颜色的小型正方体为抓取目标物,通过对双目摄像头标定以消除图像畸变,对图像依次进行预处理、颜色过滤、轮廓提取,计算得出视差,进而通过空间坐标系变换计算出距离。
(1) 图像预处理。通过高斯滤波对图像进行预处理,以减小图像的噪声影响。原图像如图5所示,预处理后图像如图6所示。

图5 原图像

图6 预处理后图像
(2) 颜色过滤。通过颜色过滤,筛选出目标物。双目摄像头拍到的图像基于RGB颜色模型,但RGB颜色模型难以找出准确的颜色范围,所以在进行颜色过滤之前,先将图像从RGB颜色空间转换到HSV颜色空间,进行颜色过滤后再转换回RGB颜色空间进行后续操作。在HSV颜色空间中,H指色调,取值范围为0°~360°;S代表饱和度,取值范围为0~1;V代表亮度,取值范围为0~1,表明颜色明亮的程度。颜色过滤后图像如图7所示,颜色过滤流程如图8所示。
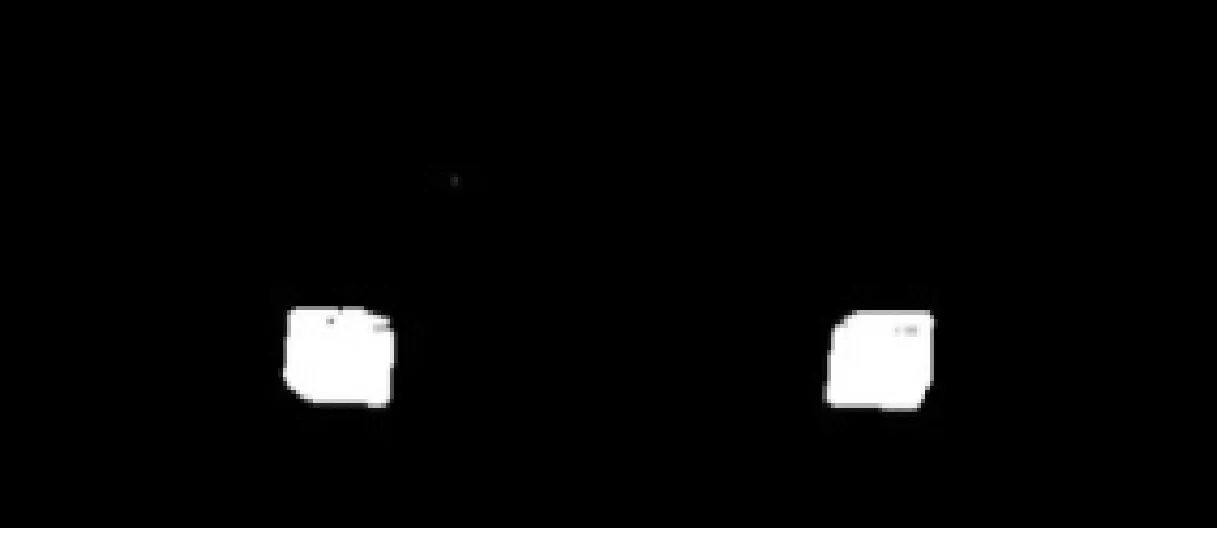
图7 颜色过滤后图像

图8 颜色过滤流程图
(3) 轮廓提取。对颜色过滤得到的图像进行高斯滤波、开运算、腐蚀,消除图像中的噪声,对新的图像进行轮廓提取,将提取得到的轮廓标注在原图中。轮廓过滤预处理后图像如图9所示,轮廓提取标注如图10所示。

图9 轮廓过滤预处理图

图10 轮廓提取标注图
(4) 双目测距。在轮廓提取时,找到目标轮廓的中心坐标,将右摄像头成像的中心坐标映射到左摄像头的坐标系中,计算两个中心坐标对应的视差,利用空间坐标系转换得到目标物块的三维坐标,即可得目标物距离信息。
4 系统调试
在控制中心的HMI上启动智能搬运机器人,智能搬运机器人检测目标物,并将要抓取的目标物颜色和距离显示在控制中心的HMI上,HMI界面如图11所示。

图11 HMI界面
智能搬运机器人检测到目标物,对目标物进行识别、抓取和搬运操作,在本实验中以黄色长方体标志为搬运终点。抓取目标物如图12所示,搬运目标物如图13所示,放置目标物如图14所示。

图12 抓取目标物图

图13 搬运目标物图

图14 放置目标物图
5 结 语
本文根据企业实际生产需求,结合控制中心功能设计,以实验室现有全向移动平台为基础,融合工业无线、双目视觉和PLC,设计完成了一种智能搬运机器人实验平台。经实验测试,该实验平台运行效果稳定,实现了智能搬运机器人对于目标物的识别、抓取和搬运功能;控制中心可通过工业无线网络获取智能搬运机器人的双目视觉数据和实验环境视频数据,实现对现场的实时监测,并完成对智能搬运机器人的远程控制。通过在我校电气自动化类专业实践教学中的应用表明,该实验平台有助于培养学生的工程意识和工程能力,增强学生项目合作能力和创新意识,提高学生解决复杂工程问题的能力,取得了良好的教学效果。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
无线互联科技(2021年4期)2021-04-21
电子制作(2019年20期)2019-12-04
中国特种设备安全(2019年2期)2019-04-22
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
现代计算机(2016年11期)2016-02-28
汽车维修与保养(2015年8期)2015-04-17
