
基于数字孪生的智能装配机械臂实验系统
2020-01-13 09:48林润泽王行健冯毅萍赵久强
实验室研究与探索 2019年12期
林润泽, 王行健, 冯毅萍, 赵久强
(浙江大学 控制科学与工程学院,杭州 310027)
0 引 言
在智能制造环境下,制造物联网搭建了车间人、机、物之间的互联互通,实现物理实体的可识别、可跟踪、可交互;而数字孪生[1](Digital Twin,DT)技术则构建了车间“情境感知-仿真计算-协同决策-生产执行”的闭环逻辑,通过信息空间数据/模型与物理空间实体之间的实时互操作,实现车间生产过程透明化、高效化和自治化[2-4],使得制造业生产管控模式发生了显著变化[5-6]。
DT技术利用数字建模和仿真的方法,对物理实体的动力学特征、结构拓扑、三维动态数据等关键信息进行描述与刻画,并融合其在全生命周期中产生的历史数据和实时反馈信息,在虚拟空间中建立与实际物理对象相互映射的虚拟实体。从多模型融合角度构建DT模型,需要将涉及智能制造全流程的多种异构模型进行集成,并融合到DT体模型中[7]。
初期DT概念包含物理实体、虚拟实体及其相互连接三个维度[1],随着面向服务的智能制造、大数据分析挖掘等概念的发展,陶飞等提出DT五维模型[8-9]的全新概念,将数据维和服务维融入DT体系框架。
本文以智能流水线教学工厂核心设备智能装配机械臂为例,研究DT体实验教学系统框架。结合基于机械臂全生命周期多维模型集成融合实验案例,梳理其三维设计模型、虚拟样机运动学仿真模型及其模型转换工具所蕴含的数据和信息,提出一种基于多模型集成融合的DT多源异构模型的集成方法,用于构建智能装配机械臂DT实验系统。
1 智能装配机械臂DT实验系统框架
智能装配机械臂DT体主要围绕如图1所示的智能制造流水线实验装置[10]展开,实验系统由机械臂物理实体、机械臂DT体模型、虚实双向交互、基于模型融合的集成仿真及实验教学资源等模块构成,其原理框架如图2所示。

图1 智能装配流水线实验装置[10]

图2 智能装配机械臂DT实验系统框架
1.1 机械臂物理实体
智能流水线实体装置包含了工业机械臂、流水线、柔性上料机等生产设备[10]。其中机械臂装置为一台KUKA KR6 sixx系列六轴机械臂,具有6个关节自由度,通过各关节的协同配合,使得机械臂的末端能以期望的角度到达指定位置并完成抓取、移动等操作。其作业速度快而稳定,并且拥有较高的精确度,具体参数如图3所示。
1.2 机械臂DT体模型
在DT虚拟空间中,机械臂具有不同生命周期、不同侧面的多个异构模型,具体包括三维设计模型、虚拟样机仿真模型、轨迹规划模型及数据驱动故障诊断模型等。在构建机械臂DT模型时,需要将上述模型进行集成融合。

图3 KUKA KR6六轴机械臂参数(mm)
考虑到该机械臂的串联特性,本文采用Simulink作为DT虚拟实体的集成仿真环境,不仅可以建立机械臂运动学/动力学仿真模型,还可以增加驱动机械臂的控制器以实现DT驱动的仿真模型构建。通过机械臂三维设计模型与DT运动学仿真模型的映射和转换,实现机械臂运行动画演示、机械臂实际关节角驱动仿真等实验内容。
1.3 虚实双向交互
物理实体与DT虚拟实体间存在着双向交互关系,物理实体的运行状态数据通过虚实双向交互通道实时同步至DT模型,而DT模型调用各类算法求解的计算结果或决策指令通过该通道下达至物理实体,实现虚实联动。同时,在DT模型中对物理实体运行状态进行实时仿真,计算实际生产运行过程中的偏差。
1.4 基于模型融合的集成仿真
基于多模型融合的集成仿真涉及的技术关键点包括模型异构信息提取、异构信息交互融合、模型转换管理系统、模型间数据关联及多模型融合仿真;而构建DT虚拟现实融合场景,可以应用于生产订单资源配置、生产工艺流程仿真、供应链信息管理、数据可视化集成和多机械臂协同调度等。
1.5 实验教学资源
在实验系统构建过程中,首先需要搭建机械臂三维装配设计模型,以表征智能装配机械臂物理实体的虚拟空间模型信息;其次,通过多模型融合的思路和方法,在虚拟资源域中构建DT仿真模型;并实现虚拟实体与物理实体之间的交互映射;然后,根据机械臂的物理资源域和DT虚拟资源域模型[10],在虚实融合的DT实验平台上设计其服务资源域,构建如图2所示的智能制造DT实验教学资源库;最后,由此开展机械臂轨迹规划、机械臂控制系统设计、机械臂优化控制与故障预测等一系列实验教学内容。
2 机械臂DT模型集成融合分析
2.1 机械臂多维异构模型
(1) 机械臂三维设计模型。智能装配机械臂三维设计模型包括机械装配体拓扑结构、机械臂零件几何描述等信息。基于模型的定义(Model Based Definition, MBD)以3D模型为载体,面向产品全生命周期的设计、制造、维护,将产品的三维信息以数字化定义的方式嵌入到3D模型中[12]。利用MBD技术可以构建面向PLM的机械臂三维设计模型,为DT多模型融合提供三维外观信息。
(2) 虚拟样机仿真模型。虚拟样机技术(Virtual Prototyping, VP)利用称为虚拟样机的数字模型代替物理样机,用于在计算环境中测试和评估产品或制造过程的特定特征[13]。机械臂虚拟样机模型反映了产品对象的功能和性能[14],主要表征机械臂运动学和动力学特征,使用数学模型来描述其对应的实体机械臂的运动状态。机械臂虚拟样机形成于三维设计阶段,通过融入产品全生命周期的闭环反馈过程,进行虚实融合和模型迭代,实现面向PLM的多层次仿真。
(3) 机械臂轨迹规划模型。作为装配单元的机械臂,需要实现动态抓取柔性上料机中位置不确定的物块,因此轨迹规划模型也是智能装配机械臂TD的重要侧面。其中,轨迹规划需要基于运动学模型的三维可视化仿真展开,而机械臂运动学模型包含在虚拟样机中,轨迹规划模型将在虚拟样机的基础上增加运动轨迹优化的概念。在DT虚拟仿真环境中构建机械臂轨迹规划模型,可以用来测试和验证轨迹规划算法的实际效果及其可靠性,最终利用虚拟空间的轨迹规划策略来驱动、控制实际机械臂的运行轨迹。
(4) 机械臂故障诊断模型。构建机械臂DT体的意义之一,在于可以通过虚拟环境的动态仿真,对物理实体的某些随时间变化的属性进行模拟和预测,即利用DT的反馈信息,通过赛博空间到物理空间的映射,对实际对象进行调整和干预。机械臂故障诊断模型针对PLM的运维、售后阶段,引入DT故障诊断模型,可以充分利用从机械臂采集而来的历史运行数据,运用数据驱动故障诊断的方法,对机械臂磨损情况、故障信息进行有效的预测和分析。
2.2 DT全生命周期多维模型的集成融合分析
产品生命周期涵盖从产品需求分析、设计、制造、销售、售后服务到回收的整个过程,DT体需要融合全生命周期阶段的多维模型信息[15]。本文选其重点,包括产品设计、产品开发、生产制造和运行维护四个阶段的模型,具体如表1所示。
机械臂DT多维模型具有一定的内在逻辑关系,存在数据交互和集成的需求。其中,机械臂设计模型为机械臂的生产制造提供了三维可视化的装配体模型,其包含的三维几何信息、拓扑结构信息可以作为虚拟样机和轨迹规划模型的虚拟空间描述资源;虚拟样机模型涉及机械臂的运动学、动力学仿真,表征了机械臂在运行过程的状态描述,其与轨迹规划模型相互映射,共同组成了DT虚拟空间的智能体仿真;而虚拟样机的生产运行信息可以作为故障诊断模型的数据来源,还可以结合历史轨迹规划数据信息来挖掘其隐含的磨损情况,用于数据驱动故障诊断。图4展示了智能装配机械臂多维度模型融合的内在信息交互关系。

表1 本文机械臂DT体的生命阶段模型

图4 智能装配机械臂多维度模型融合的内在信息交互关系
通过集成PLM不同阶段的多源异构模型,尤其融合三维设计模型、虚拟样机模型、轨迹规划模型和故障诊断模型等异构模型,可以构建机械臂全生命周期DT模型,实现DT全生命周期的模型融合。
3 基于多模型融合的DT构建
本节以机械装配模型和虚拟样机运动学模型的集成为例,具体描述机械臂设计模型和虚拟实体模型的融合过程,如图5所示。
首先,利用SolidWorks软件建立流水线机械装配模型,其中机械臂三维设计模型包含了机械臂形状尺寸信息和拓扑结构约束等。
然后,采用SimMechanics CAD转换插件生成XML和STL文件,实现机械臂三维设计模型和运动仿真模型的转换,具体步骤如表2所示。
该过程实现了模型的单向映射转换,但虚拟实体在实际运行过程中可能会出现不合理的异常情况,需要重新通过机械装配模型更新设计方案,而SimMechanics插件也包含了更新反馈环节(见表2)。
CAD装配模型中的组件与SimMechanics模块的对应关系,如表3所示。

图5 SimMechanics转换方法的模型信息转化关系

步骤具体描述1导出:CAD装配模型转换为XML多实体描述文件2导出:CAD装配模型转换为STEP/STL零件几何文件3导入:XML和STEP/STL转换为Simulink模型和M文件4更新:新的XML和STL文件在Simulink中更新多体模型
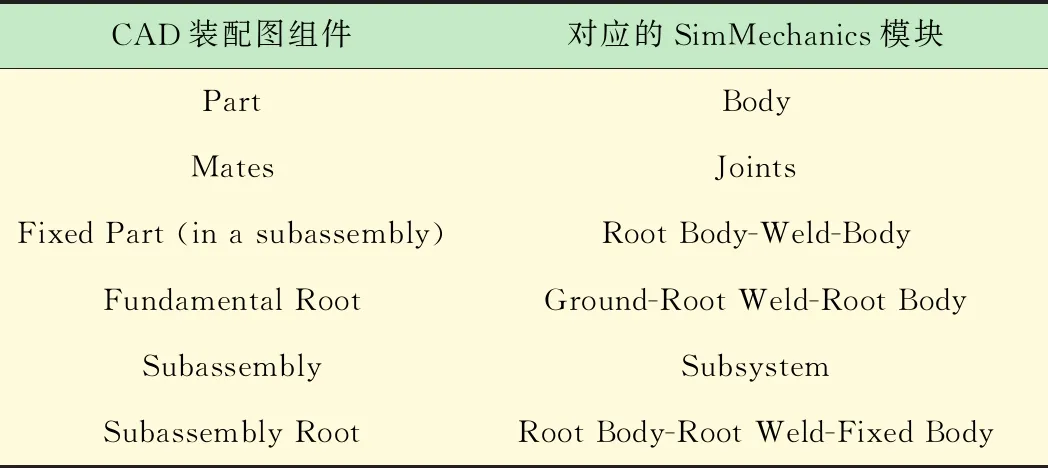
表3 CAD组件与模块之间的对应关系[16]
因此,SimMechanics转换插件主要实现了机械装配拓扑结构到MATLAB中Simulink模型的拓扑变换。
最后,根据转换得到的Simulink模型,添加运动控制相关的驱动器、传感器和控制器等。机械臂三维设计模型和虚拟仿真模型的转换关系,如图6所示。

图6 基于模型转换的机械臂DT模型构建思路
由于CAD装配模型中各零部件之间通过几何约束实现装配[17],其中蕴含的数据具有结构化的特点,包含了描述产品拓扑结构特征的结构化数据[18],而XML格式常用于结构化、存储和传输信息。因此,XML文件可以用来描述产品设计模型的树型拓扑结构,机械臂装配模型中层次约束和XML拓扑结构的关系如图7所示。

图7 机械臂装配模型及其对应的XML信息
根据图7所表示的模型信息对应关系,SolidWorks装配模型包含了产品的属性、层次结构、机械约束等关键信息,而SimMechanics XML文件包含了机械臂的特征结构,并使用标签定义描述数据信息。因此,XML文档是三维设计模型与虚拟仿真模型转换的桥梁,由此实现了异构信息的提取和统一。
SimMechanics转换插件的实质就是对CAD装配模型进行了一种拓扑变换,其生成的XML文档记录了模型转换过程的拓扑变换关系,这种模型转换方法为实现CAD产品设计模型的数据描述与数据融合提供了一种行之有效的方案,可以方便地集成、共享从产品设计环节到DT仿真环节的多模型数据。
4 智能装配机械臂DT实验案例
根据前文提出的DT实验系统框架,其实现DT模型融合所包含的技术关键点,可以分别开展实施相应的实验教学内容,每个实验内容都具有其在智能制造中的应用价值,如表4所示。
4.1 机械臂DT模型运动学仿真实验
面向三维仿真的DT模型重点关注机械臂三维运动学模型的转换融合效果。根据教学工厂数字化交付文件,获取反映机械臂三维形状及关节连杆耦合关系的SolidWorks装配模型。然后利用SimMechanics转换插件将机械臂三维设计信息导入Simulink仿真环境,输入实际采集得到的关节角-时间序列,以驱动机械臂Simulink模型的运动学仿真。智能装配机械臂TD体的Simulink运动学仿真模型如图8所示。

图8 机械臂TDSimulink运动学仿真模型
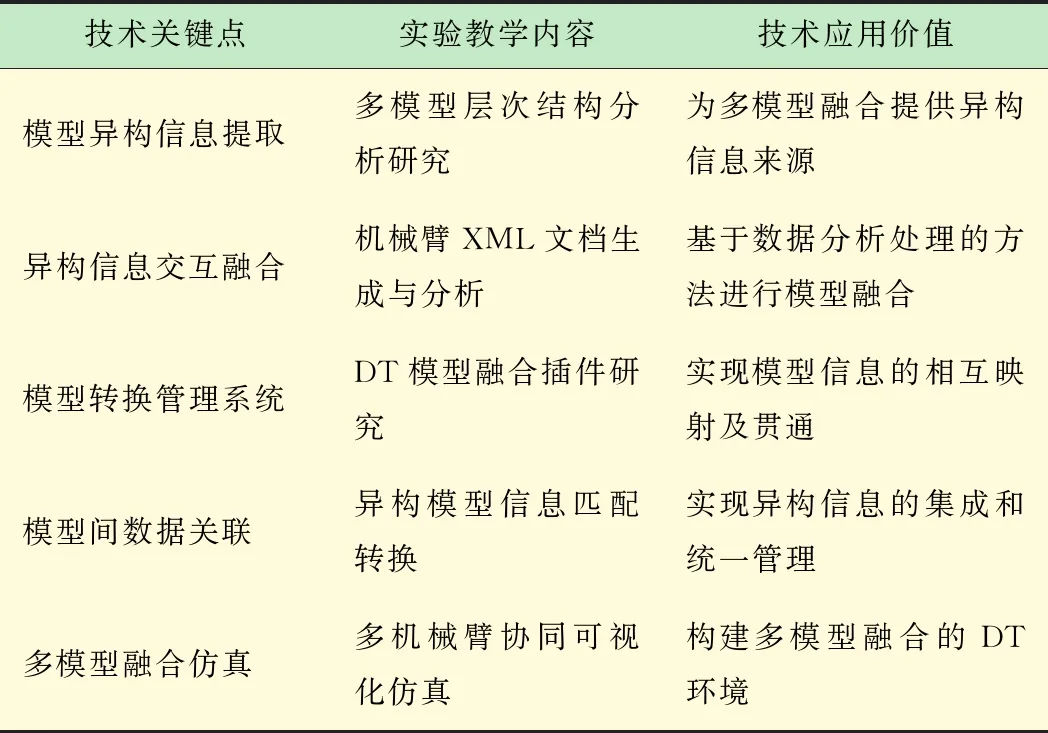
表4 基于多模型融合的DT实验教学内容
运行仿真模型可以在Simscape Multibody环境下得到机械臂DT运动学可视化仿真结果,如图9所示。该可视化仿真与实体机械臂的运行状态相对应,通过示波器还记录了末端执行器的空间轨迹。

(a) (b) (c)

(d) (e) (f)
根据上述教学实验案例,智能装配机械臂的DT仿真结果验证了本文提出的基于多模型融合的DT仿真思路的可行性。通过在DT模型中的虚拟仿真,可以模拟实体机械臂的运行情况。
4.2 机械臂DT轨迹规划实验
选取机械臂前10 s的关节角-时间序列,首先在关节空间内对其进行轨迹优化。不妨假设机械臂运动的起点和终点的关节角速度均为零,并将2,4,6,8 s所对应的关节角作为关节空间轨迹的途经点。
通过3次样条插值,可得优化后的机械臂关节角-时间关系曲线,如图10(a)所示。对上述关节角轨迹规划曲线进行数值微分,可得关节角速度曲线,如图10(b)所示。

图10(a) 机械臂关节空间三次样条轨迹规划结果
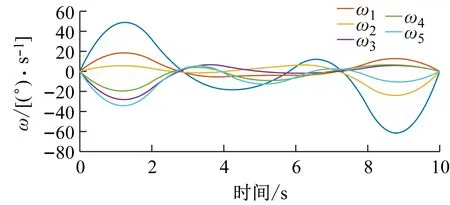
图10(b) 机械臂关节空间轨迹优化后的角速度曲线
其次,为了验证轨迹规划的效果,可以通过机械臂末端执行器的线速度曲线来判断轨迹规划结果的优劣。
原始轨迹末端执行器的速度-时间曲线如图11(a)所示;在关节空间内对轨迹进行3次样条插值,得到轨迹规划后的速度-时间曲线,如图11(b)所示;在笛卡尔空间内对轨迹进行3次样条插值,得到轨迹规划后的速度-时间曲线,如图11(c)所示。

图11(a) 机械臂末端执行器的原始线速度-时间曲线

图11(b) 关节空间轨迹优化后的速度-时间曲线

图11(c) 笛卡尔空间轨迹优化后的速度-时间曲线
由此可见,在关节空间和笛卡尔空间中对机械臂进行轨迹规划插值求解,对于机械臂的末端执行器的速度曲线有明显的优化效果,有利于减少潜在的机械磨损。
5 结 语
本文从DT的最初概念及其“五维模型”新理念出发,探讨了智能制造背景下智能工厂DT仿真的体系结构和融合转换思路,并给出了一种可行的DT多模型融合方法,最终实现了智能制造教学工厂中智能装配机械臂的DT仿真,还设计了教学实验以满足服务融合的新需求。
本文的研究理论和实验仿真可以给智能工厂DT多模型融合的模型转换提供理论依据和仿真实例,对多源异构模型的信息交互具有一定的指导价值。现阶段的研究侧重于设计阶段到运行阶段的模型融合转换,后续还将考虑赛博-物理空间的相互映射关系,引入数据融合的优化反馈环节,实现DT全生命周期的多维模型构建,使研究更具现实意义。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
房地产导刊(2020年6期)2020-07-25
读友·少年文学(清雅版)(2020年3期)2020-07-24
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
现代装饰(2018年5期)2018-05-26
中国棉花(2017年10期)2017-11-04
