
自动化工程教育专业认证中的毕业设计改革与实践
2020-01-13 09:49朱海荣张怀才
实验室研究与探索 2019年12期
朱海荣, 张怀才
(1.江苏工程职业技术学院 机电工程学院,江苏 南通 226007; 2.南通大学 电气工程学院,江苏 南通 226019)
0 引 言
我国于2006年启动工程教育专业认证试点工作,2016年正式成为国际工程教育《华盛顿协议》会员国,实现了我国和其他会员国之间的工程教育国际互认和工程师资格国际互认[1-3]。截至2017年底,全国198所高校的846个工科专业通过了工程教育专业认证,标志着这些专业进入了全球工程教育的“第一方阵”[4-6]。
南通大学自动化专业结合自身办学特点,通过实施成果导向式教育,取得了一系列的办学成果。该专业是江苏省特色专业、江苏省品牌专业、江苏省卓越工程师教育培养计划试点专业、江苏省“十二五”高等学校重点建设专业,本专业已经通过了工程教育专业认证申请,教育部认证专家于2018年下半学年进校开展认证工作。
毕业设计环节要求学生独立系统的完成一项工程设计,对培养学生的设计、实验和科研方法、增强工程意识、工程实践能力和创新能力等综合素质具有其他教学环节无法取代的重要作用,是高等院校本科教育人才培养计划的重要组成部分;具有综合性、探索性和实践性很强的特点。该环节对培养学生综合运用基础理论、基础知识和基本技能解决实际问题的能力,使学生获得基本训练,实现培养目标等方面都起着重要作用。
工程教育专业认证要求参与认证的专业有明确的专业培养目标和学生应该具备的12项毕业要求,以及学生毕业5年后应该具备的专业素养[7-9]。随着认证的逐步深入,对参与认证的专业提出了更高的要求,如怎样培养“学生解决自动化领域复杂工程问题的能力”[10-12]。对此,本专业对毕业设计环节进行了相应的改革与实践,学生结合实践性、综合性很强的毕业设计,在老师的指导下解决其中涉及的复杂工程问题,达到专业认证的要求。
1 毕业设计的要求
毕业设计环节具有较高的综合性,应以大学阶段所学习过的各门课程为依托,将各门课程间的内在联系串联起来,从中寻找规律;并通过文献研究、资料搜集,为解决复杂工程问题提供思路;针对复杂工程问题,进行分析、设计;在毕业设计中,还要通过仿真、实验辅助设计对所要解决的工程问题加以验证[13-15]。
通过毕业设计教学环节,使学生进一步掌握自动化领域相关工程问题的分析能力、新产品开发应用和设计能力、探索研究能力、使用现代工具的能力,分析工程与社会的关系,认识环境对可持续发展的影响,锻炼学生的沟通与交流能力,理解工程管理与经济决策的方法。巩固学生的理论知识、扩大知识面,在提高综合运用所学知识和技能基础上,掌握自动化领域复杂过程对象建模与分析、设计计算、工程绘图及撰写科学技术论文的一般程序和方法;进行一次工程技术人员必备的基本技能训练,使学生在毕业以后能较快地胜任技术工作。
毕业设计环节重点支持以下毕业要求指标点[16]:
2-3通过文献研究,从数学、自然科学、工程基础和自动化专业知识的角度对自动化复杂工程问题进行分析,以获得有效结论。
体现在能通过查阅相关文献,掌握毕业设计所渉课题的最新研究动态,利用所掌握的数学、自动化专业知识对课题进行机理分析,制定设计方案,建立系统仿真模型及实验方案等,并能正确理解各个电路设计及计算过程中对整个系统设计的必要性。
3-2具有自动化专业知识,并能综合考虑社会、健康、安全、法律、文化及环境等因素,给出合理的设计方案。
体现在能根据自动化专业知识,在毕业设计过程中,能综合考虑经济效益、系统可靠性、国家标准、样机外观及使用环境等因素,制定合理的设计方案。
4-3能够基于科学原理并采用科学方法,针对自动化专业领域的复杂工程问题进行信息综合研究,并能够得到合理有效的结论。
体现在通过文献检索,掌握毕业设计中所涉及的课题发展历程和国内外研究动态,并能清晰指出各种设计方案的优缺点,能正确解释所设计方案优越性的原因。
6-1能够应用工程相关背景知识,合理分析自动化专业工程实践和复杂工程问题解决方案与社会、健康、安全、法律以及文化的关系。
体现在毕业设计过程中,针对所提出的设计方案,结合自动化专业工程相关背景,要求学生综合考虑经济效益,环境保护、安全可靠性等因素。
7-2具有了解及追踪国家及地区产业发展的形势及政策的意识,熟悉环境保护的相关法律法规。
体现在毕业设计过程中,组织学生讨论其所设计的样机或产品产生的经济效益和社会效益,是否满足环境保护的相关法律法规。
10-1 能够清楚地阐述工程理念和专业观点,就自动化专业领域的复杂工程问题与业界同行及社会公众进行有效沟通和交流,清晰表达或回应指令。
体现在毕业设计最终答辩中,学生能准确陈述设计思想,表达清晰、富有逻辑性,并能准确回答老师提出的问题。
10-2 能够撰写实验报告、设计报告、总结报告,就自动化专业领域的复杂工程问题与业界同行及社会公众进行有效沟通、交流和反应。
体现在毕业设计报告撰写及最终答辩中设计思想及设计方案表达明确、清晰,逻辑严谨。就课题所涉及的相关知识能与同学进行有效沟通、交流,并能准确回答老师提出的问题。
10-3 具备一定的国际视野,了解自动化相关专业的国际发展现状及趋势,能够检索、阅读和理解外文科技文献,能有一定的外语沟通和交流能力。
体现在通过毕业设计环节中,使学生了解并掌握自动化专业相关的外文数据,并掌握其使用方法如(Science Direct、Web of Science、Elsevier、Springer等),能从海量的文献中迅速定位并获取所需文献资源。
2 毕业设计要求
2.1 选题要求
选题类型基本上可以分为4类:工程设计类、实验研究类、学术论文类、其他类型。具体要求如下:
(1) 课题应该符合自动化专业培养目标及工程教育认证标准的毕业要求,体现本专业基本训练内容,使学生受到全面的锻炼。课题主要来源于本专业工程实际问题,尽可能地结合生产、科研、现代教学和实验室建设的实际任务,有利于理论联系实际,培养学生的创新能力,增强学生的责任感和经济观念;
(2) 课题应有一定的深度、广度和难度,工作量饱满,使学生在规定的时间内,经过努力能按时完成;
(3) 课题的类型可有多种多样,应贯彻因材施教的原则,使水平不同的学生都能在原有基础上有较大的提高;
(4) 对用人单位提出的选题和学生提出的选题,在符合教学要求和培养目标的前提下,结合企业的工作实践,按照学校校外毕业设计的相关要求立题。
2.2 指导教师要求
(1) 指导教师应具有中级(含中级)以上职称,如无特殊情况,不得中途变更指导教师。
(2) 指导教师应认真、严格执行指导过程的规范,教师要给出明确的研究任务、足够数量的参考文献和外文资料,并在指导过程中严格遵循学校规定,保证毕业设计质量。指导教师要定期按计划对所指导的学生进行指导和答疑,检查课题进度、质量,及时提出调整或改进意见等。
(3) 每位教师指导的学生人数不超过7人。
(4) 指导教师的任务有:① 编写课题任务书、指导学生课题调查、审阅外文翻译、课题开题工作(含开题报告、文献综述)、中期检查、毕业设计,并根据学生在整个毕业设计期间的工作表现、能力水平和各环节任务的完成情况写出全面评语,评定各项成绩;② 注意因材施教,加强面对面指导;随时解答疑难问题,定期检查进度与质量;督导学生按期完成各阶段的毕业设计任务;③ 教书育人,全面关心学生成长;结和实际,细心做好学生的思想政治教育工作,促进学生德智体全面发展。
2.3 过程要求
(1) 立题。指导老师在第七学期申报毕业设计题目,填报立题卡,说明题目来源、内容、难易程度、工作量大小及所具备的条件等。
(2) 选题、开题。经教研室讨论审定后确定符合条件的题目和指导教师,学院批准后向学生公布。各学院采取合适的方法,组织学生选题。确定题目后,指导教师下达毕业设计任务书,明确毕业设计的具体要求。在开题阶段,要求学生根据毕业设计任务书的要求,综合运用所学知识,在大量查阅中外文献的基础上给出初步设计方案,指导老师参与方案论证并指导学生开题。
(3) 中期检查。在此基础上,学生根据任务书要求的技术指标,综合考虑工程难易度、可靠性和造价等因素,确定详细的设计方案,学院组织相应的老师开展毕业设计中期检查。
随后,学生根据设计方案完成软硬件设计,并进行系统联调,在调试中发现问题并对系统进行优化,解决毕业设计中所涉及的复杂工程问题。
(4) 成果验收。检查答辩准备工作,着重对学生答辩资格进行审查。根据任务书及毕业设计规范化要求,检查学生完成工作任务的情况,组织对毕业设计文字材料、图纸的质量、实验数据及软、硬件成果的验收等。
(5) 答辩、成绩评定、材料归档。学生通过成果验收,并上交毕业设计全部材料,指导教师对论文进行审核、评阅教师对论文进行评阅,同时学院使用大学生论文抄袭检测系统对毕业设计进行检测,达到要求者方可参加答辩。
答辩结束后,学生将全部资料整理、按学院文件要求装订好上交指导教师,指导教师审核合格后交学院保存。
3 毕业设计举例
以某个学生的毕业设计为例进行说明,毕业设计题目:智能AGV小车控制系统设计(见图1)。
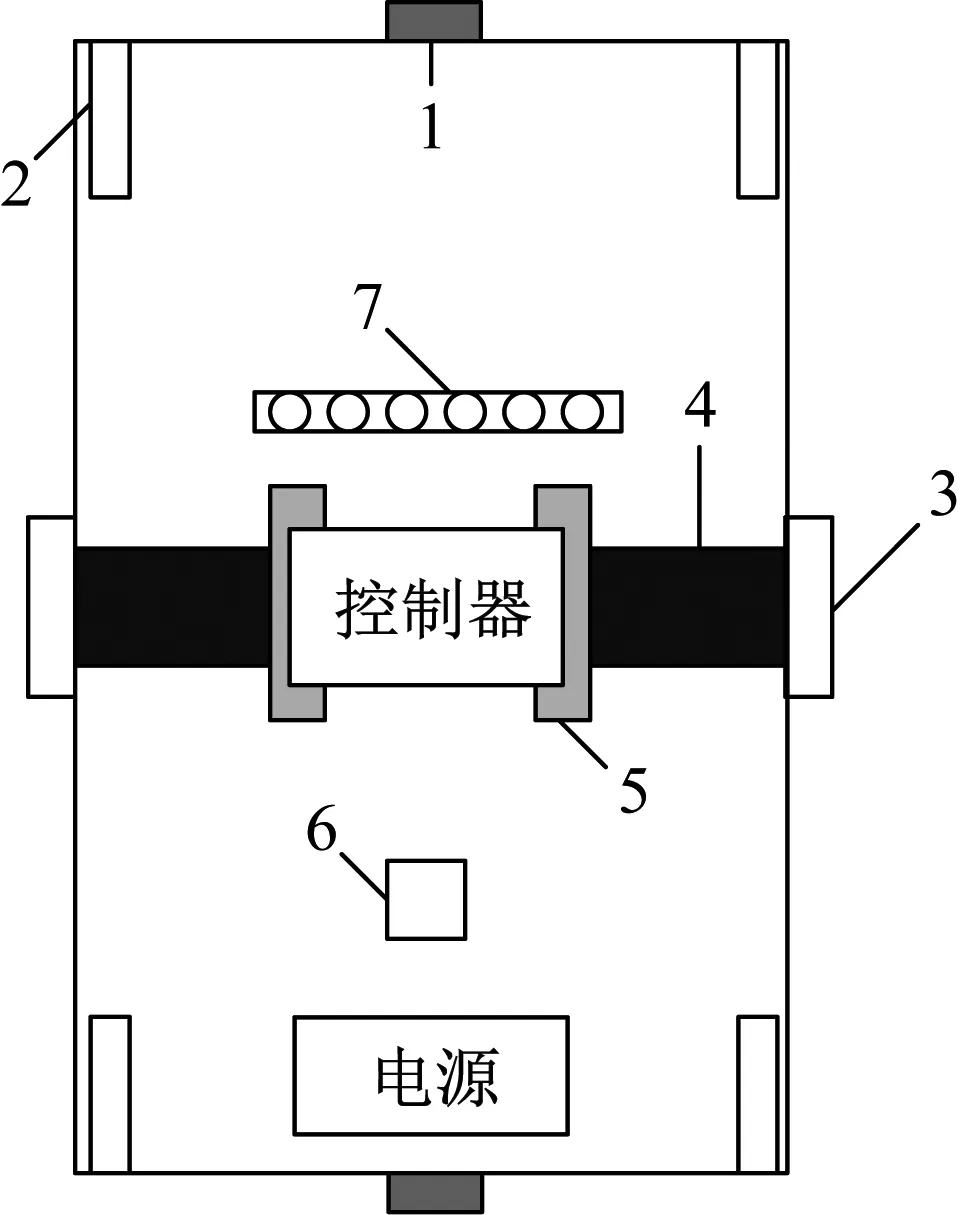
1.位移传感器;2.万向轮;3.驱动轮;4.步进电动机;5.驱动器;6.ZigBee模块;7.灰度传感器
图1 AGV车体示意图
3.1 方案论证
为了合理设计AGV控制系统,首先需要分析系统的基本要求及相应功能。系统工作原理:首先设定路径,由上位机通过无线通信模块将任务指令发送给主控模块,主控模块接收指令后根据AGV的位置、速度信息,实现自主导航和运动控制。几个模块的功能如下,通信:无论是调度、导航、路径规划还是AGV的定位,都离不开信息传递。避障:为了保证生产顺利进行和工作人员的安全,AGV的避障功能必不可少。导航定位: AGV小车自身的位置和状态信息需要实时传送给主控制器,接受控制指令并完成相应的任务。
通过对AGV小车的功能需求分析,最终采用图1所示的车体结构。其中:位移传感器1用于探测AGV前后方障碍物;车体前后两侧各安装两个万向轮2;驱动轮3安装于车体两侧居中的位置,驱动小车行驶;步进电动机4是AGV小车的动力源;驱动器5用于控制步进电动机;ZigBee模块6用于实现AGV和上位机的通信;灰度传感器7可以进行灰度检测,用于巡线导航。
3.2 硬件设计
根据毕业设计任务书要求(AGV小车载重、运行速度、运行环境等),首先计算AGV小车的基本参数,然后确定主控制器、步进电动机、伺服控制器、传感器、无线模块和电源等,AGV硬件系统结构图如图2所示。
图2 AGV硬件系统结构图
(1) 主控器选型依据。进行需求分析后发现,设计中的串口通信波特率达115 200,一般单片机串口通信的波特率达不到这个要求;芯片要求时钟频率为50 MHz,需要同时驱动PWM、ADC和串口;最终选用32 位STM32微控芯片作为主控器。以 ARM 为基础平台的系统,方便扩展。
(2) 步进电动机选型依据。AGV小车体质量为30 kg,加上负重后的总质量为80 kg。地面静摩擦系数μ约为0.15,由公式F=μmg,可得牵引力约为120 N,结合车轮半径,最后得到所需力矩为24 N·m,分配到2个步进电动机,各自需要12 N·m的力矩。最终选用额定转矩为12.5 N·m的86BYG250-150型电动机,满足动力要求。
(3) 直流电源。前面已经得到AGV小车牵引力在120 N左右,运行速度大概为1.5 m/s,根据功率计算公式P=Fv,得到AGV小车的功率为180 W,最终选用型号为S-400-48功率为400 W的电源,输出电压48 V。
(4) 无线通信模块。选用结合ZigBee 协议栈的CC2530芯片,上位机和AGV小车各安装一个ZigBee模块,上位机采用VS2008实现系统的通信控制,使用MSComm 控件编写串口程序,实现上位机与AGV小车的通信。
3.3 软件设计
根据功能,将系统软件分为以下几个模块:
(1) 上位机模块。为用户提供AGV小车状态信息的实时监控平台,主要是让用户进行一些指定任务的规划和强制控制模式的选择。
(2) 路径规划模块。通过上位机的人机界面,将需要设定的具体路径按照当前的地图画出来,并通过无线模块将所有路径发送出来。
(3) 无线通信模块。无线通信模块在控制系统中相当于主控机与AGV小车、电梯之间的桥梁,所有的数据都是通过无线建立的连接,没有了无线模块,无法实现对AGV小车的实时控制。
(4) 运行控制模块。根据微控制器所发出的指令,实现对电动机的各方面的控制。
AGV行进控制流程图如图3所示。

图3 AGV行进控制流程图
3.4 速度闭环设计
作为一个执行部件,步进电动机本身不具备反馈功能,若电动机没按指令运行,使用者无法发现。为了提高精度,在使用过程中需要对其进行监测、修正,也就是闭环反馈:测速反馈单元将速度信号反馈给主控器,主控器根据反馈的信号给出控制指令,驱动步进电动机,减小步进电动机因为丢步或者失步带来的影响。AGV 闭环直流伺服驱动系统原理如图4所示。

图4 有反馈的闭环伺服驱动系统
3.5 系统联调
最终完成的AGV小车实物图如图5所示。

图5 AGV小车实物图
图6所示为上位机路径规划界面。左侧白色方框内为需要设计路线的环境,右侧显示AGV所在楼层信息,而右下侧按钮F、B、L、R是用于规划路径的功能按钮(分别代表前、后、左、右),按钮O用于保存信息。为了保证安全,还专门设计了遇障报警功能,在AGV小车遇到障碍的时候,通过无线模块将报警信号传到上位机。

图6 上位机路径规划界面
4 课题所涉及的复杂工程问题
该毕业设计课题所涉及复杂工程问题的特征描述如下:
(1) 必须运用深入的工程原理,经过分析才可能得到解决。运用电路分析、模拟电子技术、电力电子技术、自动控制原理、电动机拖动、传感器与检测技术和单片机技术等为主的工程原理,对智能AGV小车控制系统进行分析,设计硬件电路,并开展相应的系统程序设计,在此基础上进行系统联调和实验研究。
(2) 涉及多方面的技术、工程和其他因素,并可能相互有一定冲突。本课题涉及电气、电子、控制等多方面的技术,在工程方面需要考虑控制电路、驱动电路、电动机和各种传感器的选型与系统集成,工程难易度、可靠性和造价等因素指标上相互必然有一定冲突。
(3) 需要通过建立合适的抽象模型才能解决,在建模过程中需要体现出创造性。智能AGV小车控制系统是一个复杂的控制问题和工程问题,必须综合考虑科学原理和工程应用实际,平衡利弊。要对智能AGV小车控制系统的功能需求进行分析,综合考虑多种控制方案,在控制方案的设计中体现一定的创造性。
(4) 不是仅靠常用方法就可以完全解决的。不同类型的智能AGV小车控制系统具有不同的功能,需要学生了解智能AGV小车控制系统的国内外发展现状及趋势,能够检索、阅读和理解中外文文献,综合运用在前续课程中所学习的工程原理知识,借助现有的硬件设备和相关软件,设计一种符合要求的智能AGV小车控制系统。
(5) 问题中涉及的因素可能没有完全包含在专业工程实践的标准和规范中。主控电路、驱动电路等没有统一、标准化的电路,需要学生依照实际需求、合理地选择器件,自行设计相关电路。
(6) 问题相关各方利益不完全一致。不同器件会对智能AGV小车控制系统的定位精度、运行速度、稳定性、可靠性等指标有影响,上述指标还会相互制约,因此,学生需要综合考虑上述各项性能指标,合理选择相关元器件。
(7) 具有较高的综合性,包含多个相互关联的子问题。综合应用所涉及的多学科知识,分别对控制电路、驱动电路、电源模块、无线通信模块等子问题展开研究,而且这些子问题是相互关联的。
5 结 语
毕业设计环节可以培养学生综合运用基础理论、基础知识和基本技能解决实际问题的能力,使学生获得基本训练,在实现培养目标等方面起着重要作用。通过毕业设计环节,学生独立分析问题、解决问题的能力以及实践动手能力都会有很大的提高,还可以培养自动化专业本科毕业生综合应用所学基础课、技术基础课及专业课知识和相关技能,解决具体问题的能力。以达到具备初步专业工程人员的水平,为将来走向工作岗位打下良好的基础。
本文介绍了毕业设计环节对毕业要求的支撑情况,以及我校自动化专业对毕业设计的相关要求。以某个学生的毕业设计为例,介绍了课题所涉及的复杂工程问题,阐述了学生在方案论证、软硬件设计和系统联调中所展示的解决复杂工程问题的能力,达到了自动化专业工程教育专业认证的要求。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
浙江工贸职业技术学院学报(2019年4期)2019-03-11
文苑(2018年22期)2018-11-19
电子制作(2018年9期)2018-08-04
电子制作(2018年8期)2018-06-26
消费导刊(2017年20期)2018-01-03
太原城市职业技术学院学报(2014年11期)2014-02-27
