
红外小目标检测的滞后阈值分割法
2020-02-19 02:31程正东张宏伟
激光与红外 2020年1期
魏 元,杨 华,程正东,翟 翔,张宏伟
(国防科技大学电子对抗学院,脉冲功率激光技术国家重点实验室,安徽 合肥 230031)
1 引 言
红外搜索跟踪系统可精确搜索与追踪远距离目标,在防空预警体系中具有重要地位。小目标的定义为占据像素少于8×8的目标[1],环境中众多的虚警源和远距离目标的灰度值较低,小目标的对比度与信噪比低,易被背景淹没。准确、快速地从复杂红外图像中检测弱小目标仍是当前红外目标检测领域中一个研究热点。红外小目标检测分为预处理和阈值分割两个步骤,单阈值分割、多维阈值分割等方法常见于小目标检测中。
Brink,Xiao,Sha,Chen等分别构建了图像的灰度/局部平均灰度级[2]、灰度/梯度幅度[3]、灰度/局部平均中值灰度级[4]、灰度/局部熵[5]等特征应用于二维阈值分割;颜学颖等[6]提出灰度值/加权均值/加权中值三维阈值分割。这些多维阈值分割法综合了多个特征值,但未针对小目标检测问题选择特征;且图像的灰度、局部灰度均值、局部灰度熵、梯度等用于多维阈值分割需要调和各个阈值,这带来更高的计算复杂度。为使阈值分割更适合小目标检测,吴涛等[7]以能量作为特征进行二维阈值分割。吴一全等[8]基于背景与目标面积差和类内方差提出了分割准则函数,张书真[9]则基于小目标与背景面积差和修正的灰度熵提出了分割准则函数,这两种方法对小目标检测的阈值取值法做出了探索。刘昆等[10]将小目标的灰度值和分维灰度值作为特征进行二维OTSU分割,并将分割规则限定在排除了背景区域的感兴趣区域内。针对小目标检测问题,这些算法将梯度特征、几何特征等纳入了分割依据,对小目标的阈值分割取得了更好的效果。
本文提出了滞后阈值检测算法,对预处理后的图像,通过非最大值抑制预提取待检点的中心像素,确保分割前景为待检点的中心像素,解决小目标分割前景像素占比问题。提出了局部梯度方差(NGV)衡量待检点的邻域梯度特征,并以NGV和灰度作为分割依据,进行双阈值分割。利用目标的几何特征,排除高灰度杂波干扰,解决小目标的多特征阈值分割问题。最后分析传统分割法得到的前景和背景组成,分别给出了NGV和灰度的阈值取值公式。
2 快速非最大值抑制
非最大值抑制是对待检点中心像素的预提取。小目标的像素占比小于0.5 %,且目标本身的细节和纹理特征难以观察。如果以小目标在图像中像素占比为分割依据,在图像中具有高灰度的杂波背景时,分割会将高灰度杂波作为目标检出,造成漏警。且分割结果中仍包含有一定数量的像素,在进行识别、跟踪等进一步信息处理时,小目标中心像素和其他特征的提取仍需进行。在分割之前预先提取小目标的中心像素,即可满足小目标的像素占比要求。而密集分布的杂波虚警也将被抑制为孤立的虚警点,在滞后阈值分割中通过其他特征加以排除。
非中心抑制算法的基本步骤为,以任一点为中心,将一定半径内的区域取为抑制区域,将该点与区域内的所有像素进行灰度对比,若该点的灰度最高,即认为该点为局部最大值点。该方法要求在所有点上遍历其抑制区域进行判断,若抑制区域内包含像素数为S,图像中共包含N个像素,则需要进行S×N次判断。为较少计算量,本文提出了一种快速非中心抑制算法,以边长为a的正方形作为抑制区域,步骤如下:
Step 1:将图像划分为边长为a/2的矩形细胞,每四个相邻细胞组成一个边长为a的滑窗,例如,滑窗(1,1)由细胞(1,1),(1,2),(2,1),(2,2)组成;
Step 2:在每一个滑窗内,搜索灰度值最高的像素点,在图像上标记该点;
Step 3:重复Step 2直到遍历全图,图像上被标记4次的点即为快速非中心抑制算法的极大值。
图1为快速非最大值抑制滑窗示意图。如图1(a)所示,对细胞(2,2)中的任一点P,当且仅当在滑窗(1,1),(1,2),(2,1),(2,2)内P都是最大值时,P才会被标记4次,此时P大于细胞(2,2)及其周围8细胞中所有点。如图1(b)所示,被检测为极大值点的P至少在边长为a的正方形区域内为最大值点。快速非中心抑制算法遍历全图所需判断次数为4N,远低于原算法。
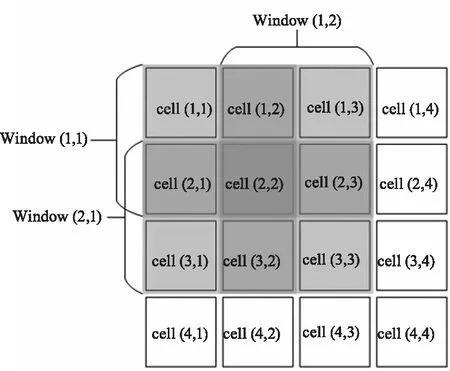
(a)局部最大值被4个滑窗分别标记

(b)所得最大值点为半径大于a/2的邻域内最大值点
3 局部梯度方差
为衡量待检点邻域上的几何特征,本文提出邻域梯度方差(NGV)。通过计算小目标邻域上梯度的离散程度,判断待检点是否为杂波的一部分。
待检点的邻域为环形区域Ψ,对待检点(x0,y0),将其作为圆心,以目标的最大半径Rmax为环内径,以2Rmax为环外径,划定Ψ,如图2中虚线围成的环状区域所示。

图2 邻域梯度方差计算区域
利用多尺度LOG算子计算Ψ内像素的梯度。将滤波图像进行归一化处理,将各尺度上响应的最大值作为梯度锐化处理的结果。
(1)
(2)

待检点的邻域梯度方差可表示为:
(3)

NGV衡量可疑点周围区域上的梯度特征,并排除可能包含目标的中心区域,因此可将其作为滞后阈值算法中辅助设定目标灰度阈值。
4 滞后阈值分割
通过NGV衡量待检点邻域是否符合点状目标特征,自适应地分配灰度级的分割阈值,对具有小目标特征的待检点采用低阈值,对具有杂波特征的待检点采用高阈值,实现低虚警率的目标分割。
4.1 阈值选取方案

表1 小目标检测滞后阈值选取方案
4.2 邻域梯度方差的阈值取值
选取阈值是实际应用中阈值分割最重要的环节。NGV覆盖了目标周围的区域Ψ。根据整幅图像的梯度分布,推算滞后阈值分割的阈值取值。OTSU分割可大致将全梯度图分为前景F和背景B。图像主要由目标、杂波、平缓背景(即低梯度杂波)组成,目标和杂波的边缘梯度较高,通常归于前景F中;而平缓背景则大部分被分割至背景B中,少部分归于F中。

(4)
其中,SB是背景B中点的总数。

(5)
其中,SW为图像的总像素数。
4.3 灰度阈值取值


(6)
其中,T为前景与背景的分割阈值;ω0,μ0分别为前景占全体待检点的比例、平均灰度;μ为待检点的总平均灰度。
(7)
5 实验与分析
本文选取了九个图像序列共900帧图像进行小目标检测,图像大小为723×546。图3给出了四个具有典型复杂背景图像序列的关键帧,图像a序列具有建筑背景,b序列中具有树木背景,c序列为具有高亮云层的简单背景,d序列则为具有高亮云层的复杂背景。图像的预处理方案采用文献[11]方法,分别应用一维OTSU阈值分割法、灰度-GLLE二维阈值分割方法[5]及本文提出的滞后阈值分割法进行实验,得到的检测结果展示于图3中。

图3 检测结果
如图3所示,图像(a1)、(b1)、(c1)、(d1)为图像序列(a)、(b)、(c)、(d)的代表帧原始图像,图像(a2)、(b2)、(c2)、(d2)为传统单阈值分割法的检测结果,图像(a3)、(b3)、(c3)、(d3)为灰度-局部熵二维阈值分割法的检测结果,图像(a4)、(b4)、(c4)、(d4)为本文提出的滞后阈值分割法的检测结果。单阈值分割结果(a2)、(b2)、(d2)中,干扰物形成了大量虚警。图像(c3)、(d3)显示,二维阈值分割对于高亮云层等变化较为平缓的干扰具有较好的滤波效果;而图像(a3)、(b3)中的建筑、树木等干扰产生的虚警仍难以被滤除,且图像中检测亮度低的目标难以被检出,这将导致检测概率的降低。图像(c4)、(b4)中绝大多数虚警都被抑制,仅剩一个虚警被检出;图像(c4)中,漏检了一个弱目标,排除了所有虚警点;图像(d4)中,两个目标都被检出,相对的,也有6个虚警点无法滤除,但虚警并未成片出现,总数量少,便于进一步的判别、跟踪。
单阈值分割对高灰度、高梯度虚警的区分度不够,导致虚警地大量出现,而二维阈值分割在综合考虑局部熵之后,能够对前景物体(建筑、树木和云层)、平缓背景(晴空)、高梯度边缘(包括表现为孤立点的小目标)和噪声干扰作出区分,检测结果中的目标图像显示了该方法的有效性;本文所提滞后阈值检测法在实际应用中选取了与上述方法不同的NGV作为区分特征,对干扰和目标形成了较好的区分,但在对高亮云层图像中的目标检测时,部分具有孤立点几何特征的点也被检为目标,这与NGV注重目标邻域几何特征有关。
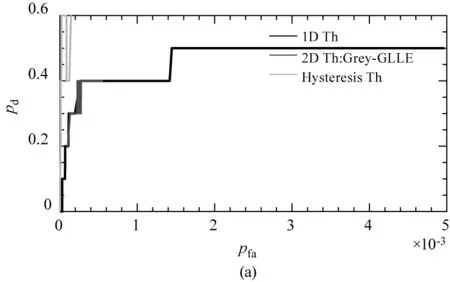
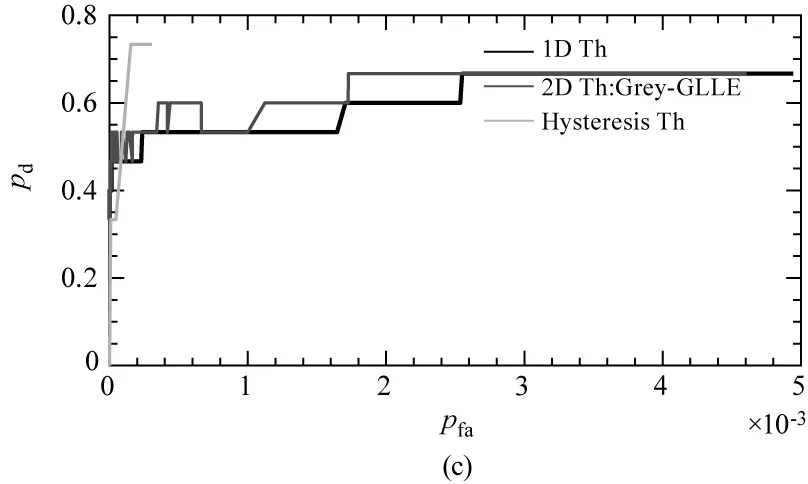
图4展示了根据四个实验图像序列的检测结果统计、绘制得到的ROC曲线,由于滞后阈值分割的虚警概率低于0.001,图4截取了区间[0,0.005]上的曲线。
图4(a)、(b)中,滞后阈值法的ROC曲线显著优于单阈值分割法和二维阈值分割法,具有相同的检测概率时,滞后阈值分割得到的虚警概率远低于其他方法。图像a序列、b序列中的干扰物为建筑和树木,从图3中的对比就已经可以看出,杂波干扰几乎被全部抑制,因此在ROC曲线中,滞后阈值检测的检测概率远高于另两种阈值分割法。
图4(c)、(d)中,虚警概率很低的情况下,滞后阈值的检测概率低于单阈值和二维阈值,但滞后阈值分割法的检测概率迅速上升并超过了另两种阈值分割法的最大值,从图3中可见,滞后阈值分割法对低灰度值的目标检测概率更高,但这也使得部分具有相同几何特征的虚警点也被检测出,通过非中心抑制环节,虚警概率被控制在较低的水平上,这使在小目标检测中能够检测出更弱的目标,虚警则相对更多地被检测出来了。

6 结 语
本文针对红外小目标检测提出了滞后阈值分割法,在阈值分割前预提取小目标的中心像素,以NGV和灰度值两个指标对待检点进行阈值分割。并分析了前景、背景的组成,给出了阈值的取值公式。实验表明,经过相同预处理步骤后,滞后阈值分割能够满足小目标检测的需求,分割出目标的中心像素,同时具有更高的检测概率和更低的虚警概率。
猜你喜欢
兵工学报(2022年11期)2022-12-01
农业工程学报(2022年7期)2022-07-09
东坡赤壁诗词(2021年1期)2021-03-24
岷峨诗稿(2020年3期)2020-11-19
吉林大学学报(理学版)(2020年3期)2020-05-29
物联网技术(2019年9期)2019-11-06
东坡赤壁诗词(2019年3期)2019-07-05
自动化学报(2018年7期)2018-08-20
东坡赤壁诗词(2018年2期)2018-05-10
科学与财富(2017年24期)2017-09-06
