基于51单片机的遥控喷灌小车的设计要点浅析
2020-02-21 02:10陈志斌林寿英
南方农业·下旬 2020年11期
关键词:小车
陈志斌 林寿英


摘 要 设计一款遥控小车能够根据使用者的意愿来实现相对应的动作与功能,不仅为花草栽培爱好者提供一种不一样的浇花方式,还能减轻劳动负担,增添娱乐性。该小车是以STC89C51为核心控制模块,所采用的功能模块有NRF24L01无线模块、L298N电机驱动模块和7805稳压模块。
关键词 MCU;NRF24L01;小车;喷灌
中图分类号:TS95 文献标志码:B DOI:10.19415/j.cnki.1673-890x.2020.33.092
随着物联网概念的普及与科技技术的不断发展,无线通信技术在生活中的运用越来越广泛。通过无线通信技术来控制驱动的小车也逐步进入人们的视野中。对于智能小车,我国国内的各大高校都有相关研究。例如,王刚等对智能小车的ABS(防抱死系统)进行了研究,通过采用调节占空比的方法来实现防抱死功能[1]。此次的小车研究是针对于小车的应用来进行论述的,该小车搭载了喷头、水泵、显示器,能够在多种环境中应用。其控制系统为STC89C51单片机,搭载的功能能够满足设计所需。
1 灌溉小车的组成
1.1 微型控制器及其最小系统
系统设计采用的是STC89C51。STC89C51是采用8051核的在系统编程ISP(In System Programming)芯片,亦称在线编程,最高工作时钟频率为80 MHz,片內含4K可反复擦写1 000次的闪烁存储器(Flash ROM)。同时芯片内集成了有128字节的数据存储器(RAM)、5个中断源以及两个优先级。STC89C51系列单片机是单时钟/机器周期的兼容8051内核单片机,是高速/低功耗的新一代8051单片机。该系列单片机入门门槛低,寄存器功能简便,程序编辑可采用C语言编辑,符合人类的逻辑思维,是目前我国教学领域中使用最广泛的微处理器。
1.2 NRF24L01无线通信模块
目前,市场上一些成熟的短距离、低功耗无线技术有ZigBee技术、蓝牙技术、WiFi技术以及NRF2401技术。ZigBee技术所用的成本高于同类产品且衍射能力与穿墙能力弱。而蓝牙技术从计算机和移动手机的普及性来看具有很大的优势。蓝牙有效通信距离不超过10 m,这与本研究所设计小车预期实现的功能不符。WiFi技术带宽大、可传视频,具有优越的通信能力,但是对于采用电池供电的小车系统来说待机功耗大,满足不了长时间使用的需求[2]。所以在此次设计中,采用NRF2401技术作为小车无线通信点,该技术具有功耗低、噪声干扰弱、工作距离适中的特点。
1.3 电机驱动模块
L298N是专用驱动集成电路,属于H桥集成电路,其输出电流增大,功率增强。其输出电流为2 A,最高电流4 A,最高工作电压50 V[3]。L298N芯片能够驱动两个二相电机或者一个四相电机,电路简单,使用方便,而且通过I/O口的控制实现电机正、反转,实现正反转具体方法如表1所示。
1.4 人机交互界面
在使用51单片机进行控制系统设计时,人机交互元件有以下3种:1)数码管;2)液晶显示器;3)有机发光二极管(OLED)。其中液晶显示屏分为两种型号:1602与12864。在本次小车设计中所采用的是1602。八段数码管所显示的内容存在局限性,编程较为复杂。而有机发光二极管售价高,所采用IIC或者SPI通信协议的内容多,程序编辑起来容易出现错误。1602液晶显示器分为上下两行总共能够显示32个字符,能够满足本设计要求且编程简单易懂。
1.5 系统供电与降压模块
由于本次系统设计中,单片机、L298N电机驱动模块和NRF24L01无线模块所需要的电力供应要求是不一样的,分别是5 V、12 V、3.3 V。考虑到所使用的驱动电机是两个5 V直流电机,电流消耗量大,所以电源供应采用航模电池,其电池容量大、电压高。为了保证单片机的正常使用,需要加入7805和AMS1117-3.3V芯片。
1.6 继电器、水泵模块
继电器模块的使用能够使单片机的弱电流、小电压来驱动电压高、电流大的负载。本次实验所选择的水泵所带的电机是12 V的,能为吸水提供可靠的动力。
2 控制系统设计
2.1 系统程序
系统程序流程图如图1所示,软件系统主要包括主程序、NRF24L01子程序、电机驱动程序、液晶显示程序4部分。在系统上电运行之后,接收板等待发送板的发送信号,进行标志位的识别并作出相应的识别操作,最后通过液晶显示进行操作读出。
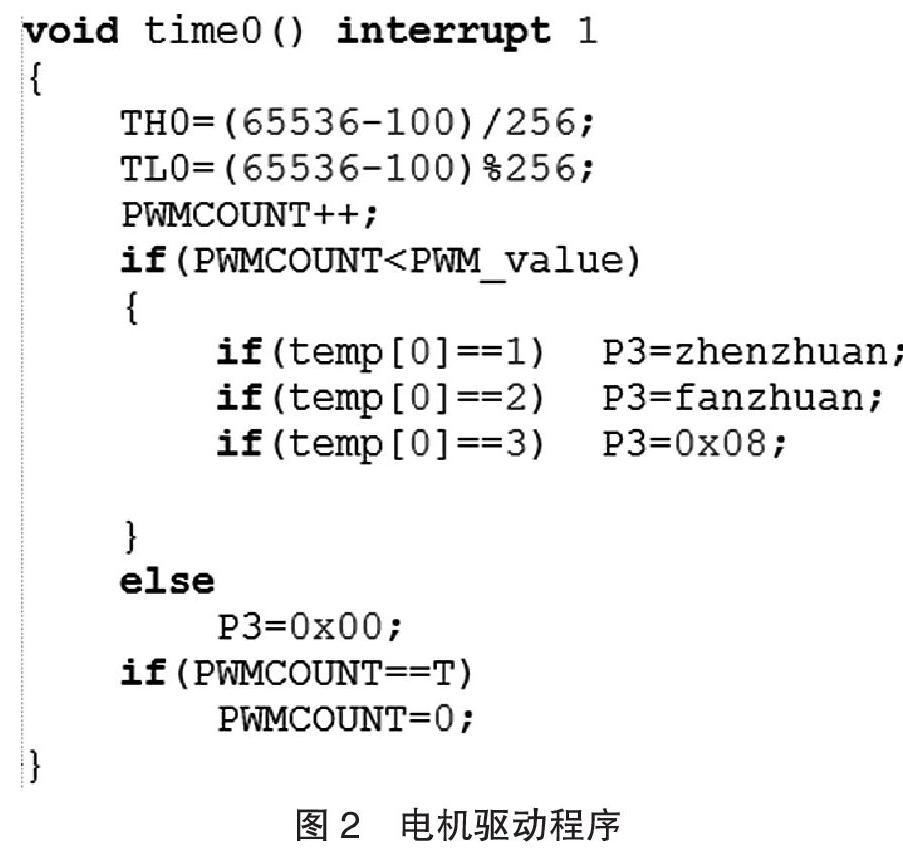
2.2 电机驱动程序
在单片机的使用中,编写电机驱动程序时一般采用改变一个周期内高低电平所占时间的比例,即占空比,来控制电机的转速。常用的使用方法有编写微秒级延时和定时器中断程序。在主程序中采用微秒级延时将不能精确控制占空比,误差大,且占用CPU内部存储空间,因此采用定时中断产生PWM波,避免占用CPU的空间,所产生的占空比精确[4]。驱动程序如图2所示。
3 结论
此次设计的遥控灌溉小车在系统上电运行后表现出良好的可靠性、稳定性与响应速度快等优点。与赵文钰等人设计的自主循迹灌溉小车相比,减少了预先布线的工序,降低了人工成本和时间成本,提高了小车的灵活性[5]。且该系统能够为一些爱好栽培花草但又行动不便的人提供浇花的便捷。但此次设计的小车还存在一些不足之处,如不能够进行电机速度调节、小车的整车稳定性不高等,希望在接下来的研究中能够对小车进行弥补与功能完善。
参考文献:
[1] 王刚,吴钟鸣.基于STC89C52RC的多功能电动玩具小车设计[J].电脑知识与技术,2017,13(7):158-161.
[2] 曾建,荣联城,姜水明,等.基于Arduino平台的智能遥控小车设计[J].电子世界,2014(7):142.
[3] 刘新蕊,郭志强,冯飞.多功能遥控小车的设计[J].科技展望,2016,26(23):180.
[4] 冯敏.基于51单片机的智能台灯系统设计[J].机电工程技术,2017(S2):275-277.
[5] 赵文钰,郭桥雨,张成杰,等.基于51单片机自主循迹灌溉小车[J].信息记录材料,2018,19(3):85-86.
(责任编辑:赵中正)
猜你喜欢
格言·校园版(2022年10期)2022-05-22
啄木鸟(2022年4期)2022-04-11
动漫界·幼教365(大班)(2021年6期)2021-06-28
幼儿教育·父母孩子版(2019年5期)2019-10-18
新少年(2017年1期)2017-03-15
学苑创造·A版(2016年11期)2016-12-07
中学科技(2014年2期)2015-01-12
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
小火炬·阅读作文(2009年2期)2009-02-17
中学科技(2008年7期)2008-08-14