
仿生注液沃土装置工作参数的优化与试验
2020-03-03 11:38张东光左国标张智泓
农业工程学报 2020年1期
张东光,左国标,佟 金,张智泓
仿生注液沃土装置工作参数的优化与试验
张东光1,2,左国标3,佟 金4,张智泓3※
(1. 太原理工大学机械与运载工程学院,太原 030024;2. 土壤环境与养分资源山西省重点实验室,太原 030031;3. 昆明理工大学农业与食品学院,昆明 650500;4. 吉林大学生物与农业工程学院,长春 130025)
为探索仿生注液沃土装置在土壤内部作业时工作参数对工作阻力和土壤粘附量的影响规律,优化作业参数,以保障并提高注液沃土装置作业质量,同时降低工作阻力和土壤粘附。该研究采用Box-Behnken试验优化设计方法,通过搭建农机土槽台车试验系统以模拟田间作业环境,开展注液沃土装置样机工作参数优化试验,将入土深度、注液量、土槽台车速度3个工作参数设为自变量,将工作阻力和土壤粘附量设为响应值,建立多元二次多项式回归方程,根据自变量与响应值之间的关系,优化仿生注液沃土装置的工作参数。结果表明:以土壤粘附量和工作阻力为响应值建立的回归方程模型拟合度良好;入土深度、液肥流量和工作速度对降低工作阻力和减小土壤粘附量的影响均显著,且入土深度和速度存在交互效应;试验因素对注液沃土装置降低工作阻力和减小土壤粘附量的影响程度为:入土深度>速度>流量,得到最优的工作参数为:入土深度11 cm、速度1.0 m/s、流量350 g/s。在最优工作参数条件下,注液沃土装置的工作阻力为260.01 N,土壤粘附量为8.73 g。该研究工作为注液沃土技术的应用和推广提供了参考依据。
仿生;设计;蚯蚓;几何结构表面;注液沃土;优化
0 引 言
液态肥含有一种或多种农作物生长所需要的营养元素,使用中可根据不同作物的生长状况进行合理配置,以满足作物对不同营养元素的需求[1-2]。与固态肥相比,液态肥吸收利用率高,液态肥施入土壤后,无需经过长时间的化学变化并溶解为液体的过程,而是直达根系并被作物吸收,其利用率得以明显的提高,从而可增加作物产量[3-7]。从生产、使用方面来看,液态肥均无粉尘、无烟雾,对环境污染小,便于生产和运输,有效降低了环境污染[8-9]。液肥深施是将液体肥料深施到地表以下作物易吸收部位的技术[10-11],将肥料施于作物根部附近一定的土壤深度中,可吸引作物根系向土壤深处生长,提高作物吸收营养成分速度、提高液肥利用率、提高作物的抗倒伏、抗旱能力、抗逆性和后期抗早衰能力,进一步增加作物产量的同时,可减少肥料的挥发与流失,更有利于农田生态保护[12-14]。液肥深施融合了液态肥和深施技术的众多优点,是液肥施用的一种重要手段。目前,随着农业领域液态肥应用的不断普及和需求迅速增加,与液肥深施技术配套的施肥机械设计及工作参数优化的重要性日益凸显[15-17]。
近年来,液肥深施需求日益增长,注液沃土技术得到发展[18-20]。作为液肥深施技术的一种实现形式,注液沃土装置通过挤压土壤形成洞道或土壤裂隙,并采用施加液体肥的方式改善土壤含水率和养分含量。当自然降水后,土壤洞道可积蓄雨水;当降水过多时,土壤洞道可汇集多余水分流入地头沟渠,为农作物生长创造有利的生态环境[18]。然而,在注液沃土技术的应用研究中发现,注液沃土装置所需牵引力较大,使其难以实现大幅宽作业;注液沃土装置与湿粘土壤作用过程中,粘附现象严重,使其作业质量大幅下降,甚至导致无法正常工作,为注液沃土技术的应用和推广造成较大阻碍。从工程仿生的技术手段出发[21-24],从蚯蚓运动、分泌粘液的方式以及体表几何结构获得了设计注液沃土装置的仿生学启示。发现蚯蚓在耕层土壤植物根系中运动,构建了蚓穴和土壤洞道,并且体表脱附性能良好[25-28]。蚯蚓在营造土壤洞穴的同时,吞噬大量土壤并排泄到体外[29-30],在这一过程中,在土壤中运动时不断从背孔中分泌出粘性体液,并顺着节间沟浸润体表,形成液体保护膜。蚯蚓粘液表现出脱附减阻效应并发挥了肥沃土壤等重要作用[31-32]。
从前期对注液沃土装置研究过程中发现,仿照蚯蚓体表特征设计的装置表面,在土壤内层注液的过程中,可以降低与土壤之间的接触面积,减小土壤粘附量,降低工作阻力,达到节能增效的目的[18]。基于前期对注液沃土装置的结构设计,本研究对仿生注液沃土装置工作参数进行优化,采用试验优化设计方法,通过农业机械土槽试验,研究了注液沃土装置入土深度、注液量、速度3个工作参数对工作阻力和土壤粘附量的影响,探索仿生注液沃土系统的最优作业参数,为液肥深施技术和注液沃土装置的研发、推广提供理论依据和技术参考。
1 试验材料及方法
1.1 仿生注液沃土装置的结构

图1 仿生原型-赤子爱胜蚓
以赤子爱胜蚓为原型,提取并拟合轮廓特征曲线,设计了仿生注液沃土装置的结构。仿照蚯蚓头部特征设计了注液沃土装置的锥形触土部件,用于分离挤压土壤;仿照蚯蚓体节特征,设计了峰谷交错的管状注液部件结构,并在波谷内设计了类似蚯蚓背孔的6个斜向防堵塞注液孔,注液孔内流出的液体肥可顺着波谷的环槽浸润注液部件,达到减小运动阻力和沃土施肥的效果。注液沃土装置如图2所示。

图2 6孔注液型式仿生注液沃土装置尺寸参数
超高分子量聚乙烯(UHMWPE)具有抗粘附、耐磨损的优异特性[33-34]。在农业机械领域,UHMWPE常应用于开沟器、覆土镇压器、铧式犁等触土部件的工作表面。注液沃土装置在触土作业过程中,容易发生土壤粘附问题,导致作业质量下降。选用密度为0.95 g/cm3、摩擦系数为0.17、吸水性为0.01%的UHMWPE棒料作为注液沃土装置的加工材料,并与前置的深松铲配套,完成注液沃土装置工作参数测试。
1.2 土槽台车试验系统
根据玉米种植农艺条件(株距30 cm,行距65 cm),田间1 m长的玉米垄内种植4株玉米。以单株玉米生长期施加50~100 g肥液,注液沃土装置运行速度1 m/s计算,田间1 m长的玉米垄内需要施加200~400 g肥液。在20 ℃环境条件下,对仿照蚯蚓体表粘液氨基酸构成配制的仿生液体肥[32],采用DV-III+(Rheometer-Brookfield Engineering Laboratories, USA)布氏数字粘度计和同轴圆柱体转子进行动力粘度测试,结果表明仿生液体肥属于牛顿流体,其动力粘度与对照组纯水无显著差异。基于上述初始参数,采用吉林大学生物与农业工程学院农业机械实验室的土槽台车试验系统进行注液沃土装置工作参数优化试验。
土槽台车试验系统由土壤、台车、数据采集3个子系统组成,如图3所示。前置深松铲与注液沃土装置安装在土槽台车的活动台架上,可在台车横梁上左右移动,注液沃土装置中轴线与土壤表面距离为10~30 cm、与深松铲铲尖相对距离为10 cm。拉压力传感器两端分别连接深松铲与仿生注液沃土装置,用于测定仿生注液沃土装置的工作阻力。在土槽台车牵引过程中,通过数字流量计读取液肥的质量、流量,采用数据采集系统记录注液沃土装置的工作阻力。台车停止后关闭注液系统,采用称质量法测定注液沃土装置的土壤粘附量。

图3 土槽台车试验系统示意图
1.3 工作阻力及土壤粘附量测试方法
为确定土槽内土壤质地,在土槽内采用棋盘式布点法取土壤样品10份,测定土槽内土壤粒径分布,结果如表1所示。

表1 土槽内土壤样品的粒径分布
按照国际土壤分类标准(USDA Soil Taxonomy),土槽试验区的土壤质地为砂质黏壤土(sandy clay loam)。在土槽中选择40 m作为试验区,并在试验区前后分别剖开入土和出土调整区各2 m。深松铲从入土调整区开沟,注液沃土装置随之进入沟内挤压分离土壤。试验时仅将装置完全进入40 m试验区后采集的数据作为测定值,全部试验完成后,重复翻整、晾晒、镇压试验区内的土壤。采用Field Scout SC-900(spectrum technologies, plainfield, USA)数字式土壤坚实度仪进行试验区土壤坚实度测试,在0~30 cm耕层土壤剖面内,以深度2.5 cm为梯度记录数据,重复3次取平均值,如表2所示。

表2 土槽不同耕层深度土壤物理参数
注液沃土装置与仿生深松铲通过全桥式应变传感器(H3-C3-6B 750 kg, ZEMIC, China)连接,拉力信号由数据采集卡传送至计算机,经拉力-电压标定曲线计算得到工作阻力,测试平台如图4所示。
选择新鲜、无机械伤、无病害、根茎结实粗壮且大小均匀的莲藕,表皮颜色白嫩略带黄褐色,没有明显黑色斑块[14]。

1.仿生深松铲 2.拉压力传感器(带有保护壳) 3.试验样件 4.LabView数据采集程序 5.数据采集卡 6.信号放大器
在装置到达出土调整区之后,关闭注液系统,收集并称量粘附在注液沃土装置上的土壤质量作为土壤粘附量,如图5所示。
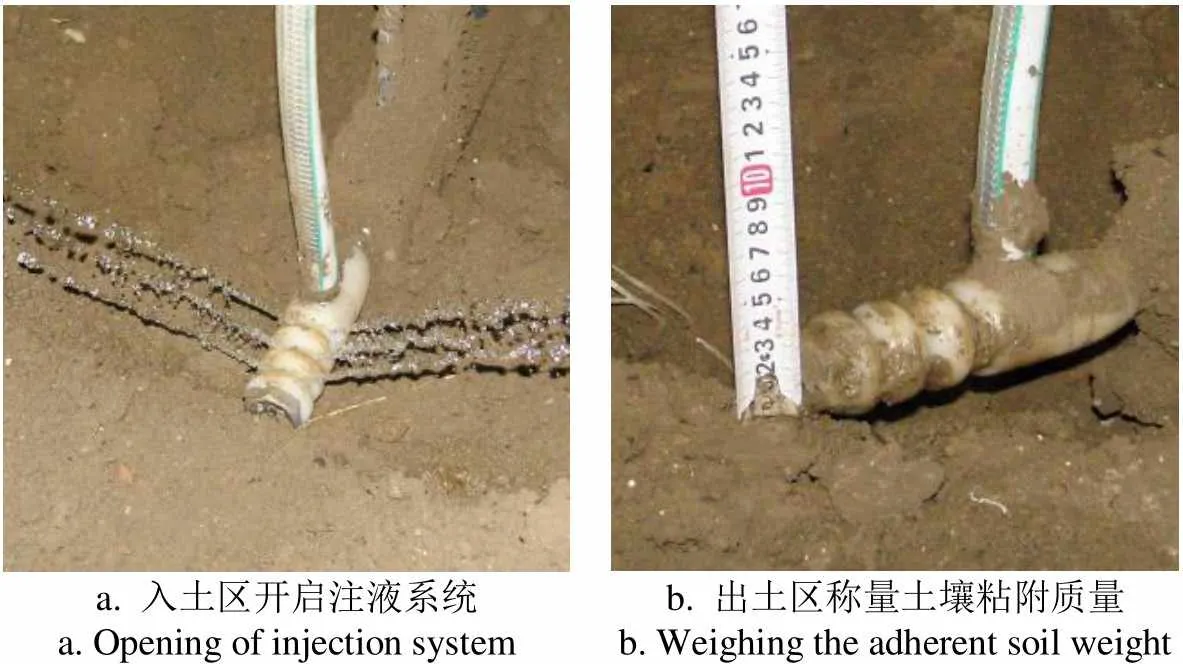
a. 入土区开启注液系统a. Opening of injection systemb. 出土区称量土壤粘附质量b. Weighing the adherent soil weight
2 结果与分析
2.1 试验设计方案
为考察仿生注液沃土装置工作过程中入土深度、注液流量和前进速度3个参数对工作阻力和土壤粘附量的影响,采用Box-Behnken中心组合试验设计方法,寻求仿生注液沃土装置最优工作条件。Box-Behnken试验设计方法是多因素3水平的试验设计方法,可以减少试验次数,提高试验效率,降低试验的成本。根据Box-Behnken试验设计,将装置入土深度(1)、注液流量(2)和机具前进速度(3)设为自变量,将土壤阻力(1)和土壤粘附量(2)设为响应值,制定了3因素3水平的试验因素与编码水平,如表3所示。

表3 试验因素与编码水平
2.2 试验结果及分析
在Box-Behnken试验设计给定的条件下,采用Design Expert(V8.0.6, Stat-Ease, USA)软件建立试验设计方案,并按序号开展试验。取3次重复试验结果的平均值作为注液沃土装置工作阻力和土壤粘附量的响应值,如表4所示。
1)工作阻力结果分析
根据表5中的试验数据进行二次多项式回归拟合,建立入土深度(1)、流量(2)、速度(3)与阻力(1)之间的多元二次多项式回归方程,构建试验指标与多个试验因素之间的回归曲面,如式(1)所示。

对根据工作阻力建立的多元二次多项式回归方程进行方差分析,模型及回归系数的显著性检验结果如表5所示。

表4 仿生注液沃土装置工作参数试验设计方案及测试结果
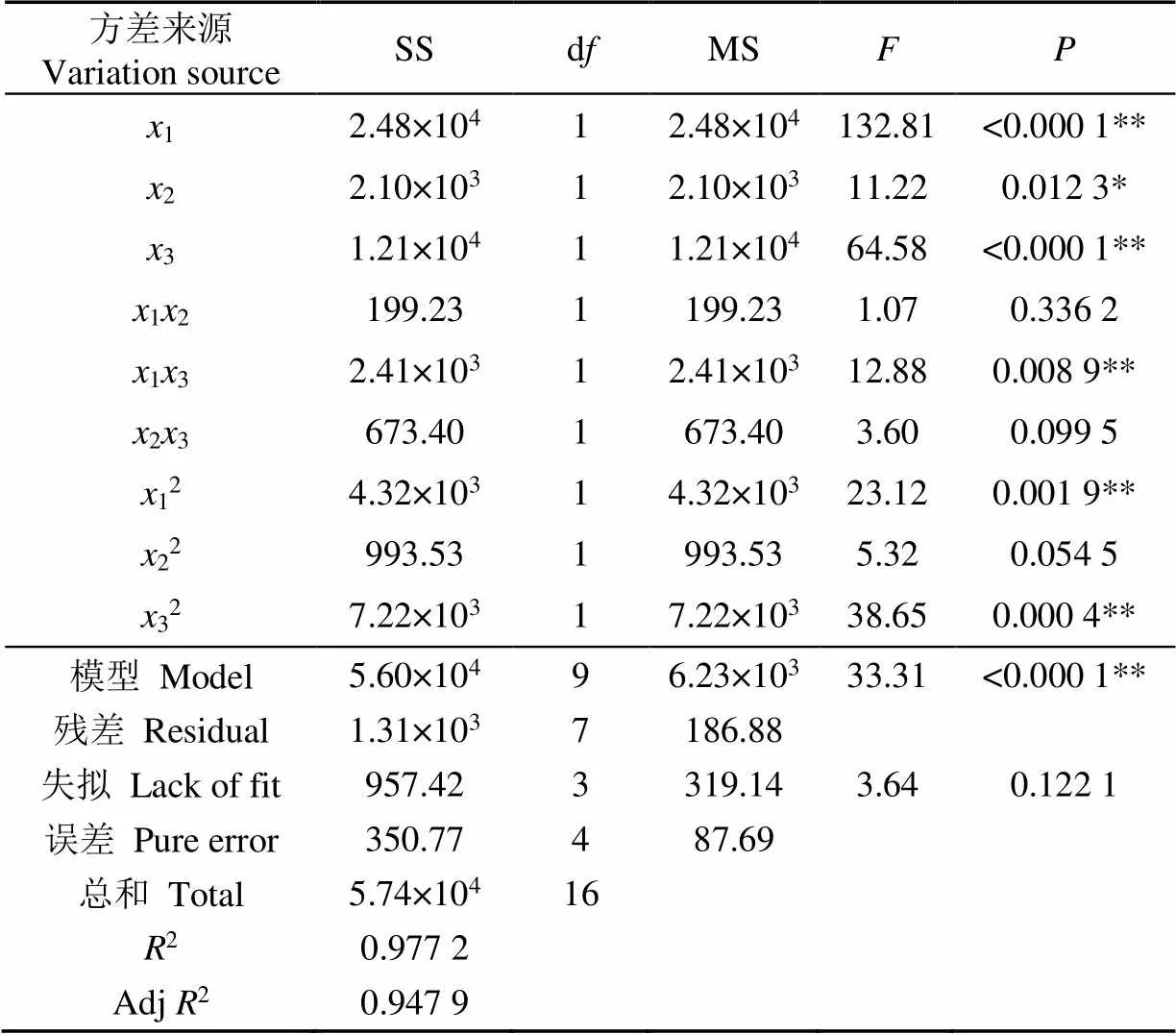
表5 多元二次多项式回归方程的方差分析(工作阻力)
注:SS 表示平方和,df 表示自由度,MS 表示均方,*表示显著(<0.05),**表示极显著(<0.01),下同。
Note: SS is sum of squares; df is degree of freedom; MS is mean squares; *shows significant (<0.05); ** shows very significant (<0.01). The same below.
由表5可知,建立的多元二次多项式回归方程显著性<0.000 1,模型显著。拟合优度2=0.977 2,模型的拟合度较好。校正系数Adj2=0.947 9,预测值与试验值之间的相关性较高,可用此模型对工作阻力进行分析和预测。失拟项=0.122 1>0.05,未知因素对试验结果的影响较小。模型的线性项入土深度(1)、流量(2)、速度(3)和二次项12、32对工作阻力的影响较显著,模型交叉项入土深度和速度(13)对响应值影响显著,说明试验因素对工作阻力的影响不是简单的线性关系,具有交互作用。试验因素对注液沃土装置工作阻力影响的显著性程度依次为:入土深度(1)>速度(3)>流量(2)。
在入土深度、速度、流量3个试验因素中,固定其中1个试验因素为常量,选择另外2个试验因素作为自变量,绘制自变量与响应值(工作阻力)的三维响应面图及相应的等高线图,如图6、图7和图8所示。由图6可知,当速度(3)为零水平时,入土深度(1)和流量(2)两者间等高线稀疏,说明两试验因素之间的交互作用不显著。当流量保持不变时,工作阻力随着入土深度的增加而增大。当入土深度保持不变时,工作阻力随着流量的增大而减小。因此,仿生注液沃土装置的入土深度较高和注液流量较低时,工作阻力均比较大。可能的原因是,增加耕作深度,加强了土壤扰动,注液沃土装置挤压和分离土壤的质量也随之提高,从而导致工作阻力增加。当速度较快或注液量较低时,仿生注液沃土装置喷施的肥液主要被土壤吸收,此时装置的外表面难以完全浸润形成润滑水膜,从而导致工作阻力较大。

图6 入土深度与流量对工作阻力的等高线和响应曲面图
由图7可知,当流量(2)为零水平时,入土深度(1)和速度(3)两因素之间的等高线紧密,说明入土深度和速度之间的交互作用较为显著。工作阻力随着入土深度的增加而显著增加,并随着速度的增加而逐步增大。

图7 入土深度与速度对工作阻力的等高线和响应曲面图
由图8可知,当入土深度(1)为零水平时,流量(2)和速度(3)两因素之间的等高线稀疏,说明流量与速度之间的交互作用不显著。当速度一定时,工作阻力随着流量增加而减小。当流量一定时,工作阻力随着速度增加而增大。仿生注液沃土装置的优化目标之一为工作阻力最小。在Design Expert优化功能中对工作阻力取最小值,可获得仿生注液沃土装置的最佳工作参数为:入土深度为10.53 cm、流量343.37 g/s、速度0.66 m/s。在此条件下,仿生注液沃土装置的工作阻力理论值为258.36 N。

图8 流量与速度对工作阻力的等高线和响应曲面图
2)土壤粘附量结果分析
对根据土壤粘附量建立的多元二次多项式回归方程进行方差分析,模型及回归系数的显著性检验结果如表6所示。据此表中的试验数据进行二次多项式回归拟合,建立入土深度(1)、流量(2)、速度(3)与粘附量(2)之间的多元二次多项式回归方程,构建试验指标与多个试验因素之间的回归曲面,如式(2)所示。


表6 多元二次多项式回归方程的方差分析(土壤粘附量)
由表6可知,以土壤粘附量为响应值所建立的回归方程模型显著(=0.000 4),失拟项不显著(=0.186 0),该模型与试验拟合性较好。回归方程模型拟合优度2=0.959 4,校正系数Adj2=0.907 2,该回归模型的拟合度良好,可以较好的描述响应值与试验因素之间的关系。模型线性项入土深度(1)、流量(2)、速度(3)和二次项22对土壤粘附量的影响较显著;模型交叉项入土深度和速度(13)对土壤粘附量的影响较显著,这2个试验因素之间存在交互作用。由值可知,试验因素对仿生注液沃土装置土壤粘附量影响的显著性程度依次为:入土深度(1)>速度(3)>流量(2)。根据二次多项式回归方程绘制的土壤粘附量二维等高线和三维响应面,如图9所示。

图9 土壤粘附量二维等高线和三维响应面
由表6和等高线图可知,入土深度(1)与速度(3)的交互作用显著,流量(2)与速度(3),入土深度(1)与流量(2)的交互作用不显著。试验因素对仿生注液沃土装置土壤粘附量的影响程度为:入土深度>速度>流量。当流量一定时,仿生注液沃土装置的土壤粘附量随着入土深度和速度的增加而逐渐增大。可能的原因是,土壤粘附量与土壤质地有关,土壤中含黏粒数量越多,土壤粘附力越大。试验区砂质粘壤土的透气、渗水性好,深层土壤含水量较高,粘粒数量较多,对土壤粘附量影响幅度较大。此外,土壤粘附量也与耕层结构稳定性有关,随着工作速度增加,土壤扰动频率加快,粘粒与装置的相对接触面积增加,土壤粘附效应增强。当入土深度或速度一定时,仿生注液沃土装置的土壤粘附量随着流量的增加先降低后增大。可能的原因是,土壤在塑限以下时近似刚体,具有较高的坚实度。随着流量增加,装置与土壤之间形成一层润滑水膜,降低了土壤粘附量。当流量不断增加时,装置与土壤之间的水膜逐渐变厚,土壤接触层含水量趋于饱和,导致接触层土壤的坚实度下降,而与装置表面之间的粘附力不断增强。对回归模型进行优化处理,获得仿生注液沃土装置减小土壤粘附量的最佳工作参数为:入土深度13.73 cm,流量254.95 g/s,速度0.53 m/s。在此条件下,仿生注液沃土装置土壤粘附量的理论值为8.34 g。
2.3 验证试验
在上述试验因素范围内,仿生注液沃土装置达到最低工作阻力的工作参数为入土深度10.53 cm,流量343.37 g/s,速度0.66 m/s;达到最低土壤粘附量的工作参数为入土深度13.73 cm,流量254.95 g/s,速度0.53 m/s。考虑土槽系统实际操作,对上述参数圆整后进行验证试验,3次重复取平均值,如表7所示。
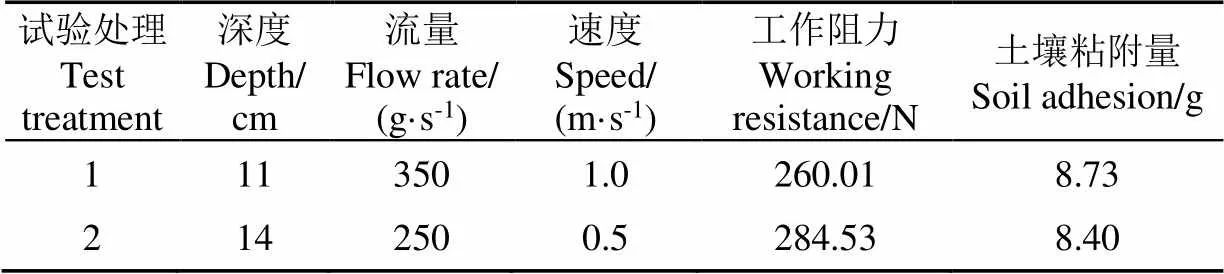
表7 工作参数验证试验结果
在给定的工作参数下,实际测试值与模型预测值接近,建立的回归模型可以较好的反映出工作阻力和土壤粘附量的工作参数。将达到最小工作阻力和土壤粘附量的工作参数选定为:入土深度11 cm、速度1.0 m/s、流量350 g/s。仿生注液沃土装置构建的土壤洞道如图10所示。深松铲牵引仿生注液沃土装置挤压分离土壤,形成洞道,翻向深松铲两侧的土壤回填覆盖至土壤洞道上方,形成了图中所示的覆土区。土壤洞道内部经注液形成湿土层,覆盖的表层土壤形成干土层。
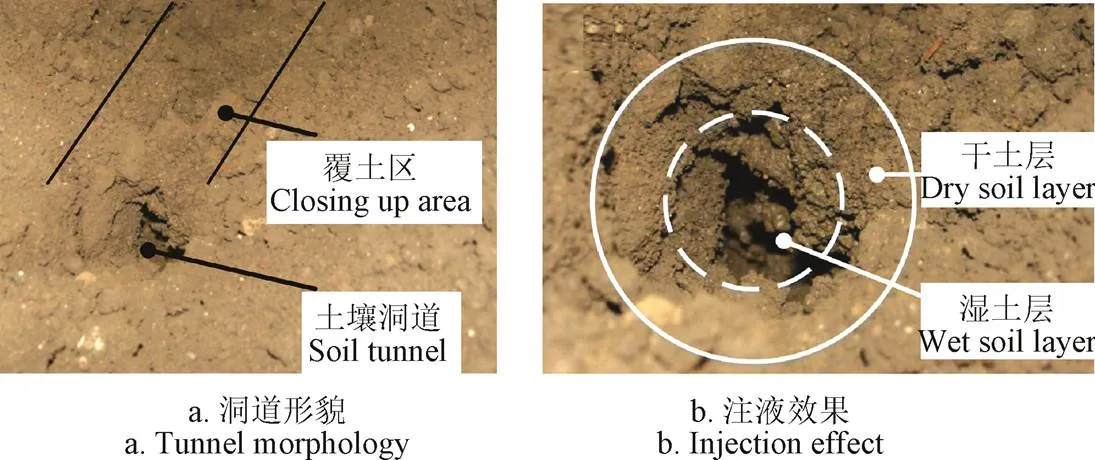
图10 仿生注液沃土装置构建的土壤洞道
采用仿生沃土技术,研发提高耕层结构、改善土壤肥力的沃土装置具有以下优势:第一,沃土装置能够向土壤深层施加有机肥料,并具有较好的减阻脱附特性;第二,沃土装置能够多部件联合作业,增加土壤孔隙度,达到蓄水保墒的效果。学习蚯蚓在土壤中的运动方式,仿照蚯蚓体表粘液及表面结构设计的注液沃土装置与课题组前期研发的仿生深松铲相配合,在一次作业过程中实现了土壤深松、洞道构建、液体肥深施三项功能,装置本身还具有减阻脱附的优良特性,实现了节能降耗的作业目标。仿生注液沃土装置体现了农机与农艺的协同作用,具有较大的应用潜力。
3 结 论
采用农机土槽台车试验系统进行仿生注液沃土装置样机工作参数的优化试验。以获得最小工作阻力、最低土壤粘附量为试验目标,通过控制仿生注液沃土装置入土深度、注液量、土槽台车速度3个工作参数,分析各因素与试验目标之间的关系,优化仿生注液沃土装置的工作参数。采用Box-Behnken试验设计,将仿生注液沃土装置入土深度、注液流量和机具前进速度设为自变量,将工作阻力和土壤粘附量设为响应值,建立了自变量与响应值之间的多元二次多项式回归方程。得到以下结论:
1)以土壤粘附量和工作阻力为响应值建立的回归方程模型拟合度良好,可以较好的描述响应值与试验因素之间的关系;
2)试验因素对仿生注液沃土装置工作阻力和土壤粘附量的影响程度均为:入土深度>速度>流量。入土深度、速度、流量对工作阻力和土壤粘附量的影响较显著;模型交叉项入土深度和速度存在交互作用;
3)综合考虑工作阻力和土壤粘附量,获得最小工作阻力和土壤粘附量的工作参数为:入土深度11 cm、速度1.0 m/s、流量350 g/s。在最优工作参数下,注液沃土装置的工作阻力为260.01 N,土壤粘附量为8.73 g。
[1] Randall G W, Hoeft R G. Placement methods for improved efficiency of P and K fertilizers: A review[J]. Journal of Production Agriculture, 1988, 1(1): 70-79.
[2] Nath S, Singh K. Analysis of different nutrient status of liquid bio-fertilizer of different combinations of buffalo dung with gram bran and water hyacinth through vermicomposting by Eisenia fetida[J]. Environment, Development and Sustainability, 2016, 18(3): 645-656.
[3] Ahmad A A, Radovich T J, Nguyen H V, et al. Use of Organic Fertilizers to Enhance Soil Fertility, Plant Growth, and Yield in A Tropical Environment[M]//Organic Fertilizers-From Basic Concepts to Applied Outcomes. Rijeka, Croatia: IntechOpen. 2016.
[4] Zewde A, Mulatu A, Astatkie T. Inorganic and organic liquid fertilizer effects on growth and yield of onion[J]. International Journal of Vegetable Science, 2018, 24(6): 567-573.
[5] Olaghere I, Omotesho O, Muhammad L A. Comparative analysis of the profitability of liquid fertilizer usage in dry season vegetable production in the southern guinea savannah zone of nigeria[J]. Albanian Journal of Agricultural Sciences, 2017, 16(3): 121-126.
[6] Harris R, Hernandez G, Locas C, et al. The effect of fertilizer on the growth rate of the diatom Licmophora abbreviata[J]. The Expedition, 2018, 7(1): 1-14.
[7] Moh S M, Moe K, Obo Y, et al. Effects of fermented nori () liquid fertilizer on plant growth characteristics and nutrient content of komatsuna () cultivated in vermiculite[J]. American Journal of Plant Sciences, 2018, 9(8): 1601-1617.
[8] Roach T, Bame G. Environmentally-friendly High Potassium-content Liquid Fertilizer and Uses for the Fertilizer: US9771306B2[O]. 2017.
[9] Xie Ming, Zhang Mingxin, Cooper P, et al. Osmotic dilution for sustainable greenwall irrigation by liquid fertilizer: Performance and implications[J]. Journal of Membrane Science, 2015, 494(1): 32-38.
[10] 王金武,周文琪,白海超,等. 液肥深施机差动式双向供肥分配装置设计与试验[J]. 农业机械学报,2018,49(6):105-110.
Wang Jinwu, Zhou Wenqi, Bai Haichao, et al. Design and test of differential two-way fertilizer distribution device for liquid fertilizer deep applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 105-110. (in Chinese with English abstract)
[11] 王金武,潘振伟,杨欣伦,等. 深施型液态施肥机液肥转子式转换器设计与试验[J]. 农业机械学报,2014,45(10):110-115.
Wang Jinwu, Pan Zhenwei, Yang Xinlun, et al. Design and experiment of rotary converter of liquid fertilizer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 110-115. (in Chinese with English abstract)
[12] Liu T Q, Fan D J, Zhang X X, et al. Deep placement of nitrogen fertilizers reduces ammonia volatilization and increases nitrogen utilization efficiency in no-tillage paddy fields in central China[J]. Field Crops Research, 2015, 184(1): 80-90.
[13] Bautista E U, Koike M, Suministrado D C. PM—power and machinery: Mechanical deep placement of nitrogen in wetland rice[J]. Journal of Agricultural Engineering Research, 2001, 78(4): 333-346.
[14] Nkebiwe P M, Weinmann M, Bar-Tal A, et al. Fertilizer placement to improve crop nutrient acquisition and yield: A review and meta-analysis[J]. Field Crops Research, 2016, 196(1): 389-401.
[15] 周文琪. 深施型斜置式液肥穴施肥装置机理分析与试验研究[D]. 哈尔滨:东北农业大学,2018.
Zhou Wenqi. Mechanism Analysis and Experimental Study of Deep Application Oblique Liquid Fertilizer Hole Fertilizer Applicator[D]. Harbin: Northeast Agricultural University, 2018. (in Chinese with English abstract)
[16] 潘振伟. 液态肥肥路转换器及输肥系统设计与试验研究[D]. 哈尔滨:东北农业大学,2014.
Pan Zhenwei. Design and Experimental Study of Liquid Fertilizer Road Converter and Fertilizer Delivery System[D]. Harbin: Northeast Agricultural University, 2014. (in Chinese with English abstract)
[17] 冯金龙. 变形齿轮式液肥深施注射机构工作机理与试验研究[D]. 哈尔滨:东北农业大学,2017.
Feng Jinlong. Working Mechanism and Experimental Study of Deep Injection Mechanism for Deformed Gear Liquid Fertilizer[D]. Harbin: Northeast Agricultural University, 2017. (in Chinese with English abstract)
[18] 张东光. 蚯蚓粘液脱附减阻机理和仿生沃土应用[D]. 长春:吉林大学,2016.
Zhang Dongguang. Resistance Reduction Mmechanism of Earthworm Mucus Desorption and Application of Biomimetic Fertile Soil[D]. Changchun: Jilin University, 2016. (in Chinese with English abstract)
[19] 张东光,吴亚丽,黄高鉴,等. 一种具有蚯蚓条播功能的沃土装置:10141252.X[P]. 2017-06-30.
[20] 张银平,杜瑞成,刁培松,等. 机械化生态沃土耕作模式提高土壤质量及作物产量[J]. 农业工程学报,2015,31(7):33-38.
Zhang Yinping, Du Ruicheng, Diao Peisong, et al. Mechanized eco-fertile tillage mode to improve soil quality and crop yield[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(7): 33-38. (in Chinese with English abstract)
[21] 贾洪雷,罗晓峰,王文君,等. 耕作部件耦合仿生表面结构制备方法[J]. 农业机械学报,2016,47(S1):130-135.
Jia Honglei, Luo Xiaofeng, Wang Wenjun, et al. Fabrication method of bionic surface structure coupled with tillage components[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S1): 130-135. (in Chinese with English abstract)
[22] 张伏,王亚飞,马田乐,等. 山羊蹄底部非规则曲面仿生形貌数学模型构建及验证[J]. 农业工程学报,2018,34(15):30-36.
Zhang Fu, Wang Yafei, Ma Tianle, et al. Mathematical model construction and verification of bionic topography of irregular surface at the bottom of goat’s hoof[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 30-36. (in Chinese with English abstract)
[23] 马云海,裴高院,王虎彪,等. 挖掘机獾爪趾仿生斗齿提高其入土性能仿真与试验[J]. 农业工程学报,2016,32(18):67-72.
Ma Yunhai, Pei Gaoyuan, Wang Hubiao, et al. Simulation and test of bionic bucket teeth of digger badger's claw toe to improve its soil penetration performance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 67-72. (in Chinese with English abstract)
[24] 郭俊,张庆怡,Memon M S,等. 仿鼹鼠足趾排列的旋耕-秸秆粉碎锯齿刀片设计与试验[J]. 农业工程学报,2017,33(6):43-50.
Guo Jun, Zhang Qingyi, Memon M S, et al. Rotary tillage-straw crushing saw-tooth blade design and experiment imitating mole toe arrangement[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(6): 43-50. (in Chinese with English abstract)
[25] 贾洪雷,郑健,赵佳乐,等. 仿蚯蚓运动多功能开沟器设计及参数优化[J]. 农业工程学报,2018,34(12):62-71.
Jia Honglei, Zheng Jian, Zhao Jiale, et al. Design and parameter optimization of multi-function trencher imitating earthworm motion[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 62-71. (in Chinese with English abstract)
[26] Jia Honglei, Wang Weijun, Wang Wanpeng, et al. Application of anti-adhesion structure based on earthworm motion characteristics[J]. Soil and Tillage Research, 2018, 178(1): 159-166.
[27] Gu Yunqing, Fan Tianxing, Mou Jiegang, et al. A review of bionic technology for drag reduction based on analysis of abilities the earthworm[J]. International Journal of Engineering Research in Africa, 2016, 19(1): 103-111.
[28] Li Jianqiao, Kou Bingxue, Liu Guomin, et al. Resistance reduction by bionic coupling of the earthworm lubrication function[J]. Science China Technological Sciences, 2010, 53(11): 2989-2995.
[29] 林嘉聪,刘志刚,邢行,等. 不同光照条件下蚯蚓避光性运动与蚓粪机械化分离参数量化[J]. 农业工程学报,2018,34(2):235-241.
Lin Jiacong, Liu Zhigang, Xing Xing, et al. Quantification of light-avoiding motion and mechanical separation parameters of earthworm excrement under different light conditions[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(2): 235-241. (in Chinese with English abstract)
[30] 井大炜,王明友,张红,等. 蚯蚓粪配施尿素对豇豆根系特征与根际土腐殖质的影响[J]. 农业机械学报,2017,48(1):212-219.
Jing Dawei, Wang Mingyou, Zhang Hong, et al. Effects of Vermicompost co-applied with urea on root characteristics and humus in rhizosphere soil of Cowpea[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 212-219. (in Chinese with English abstract)
[31] Ansari A, Ismail S. Earthworms and Vermiculture Biotechnology[M]//Management of Organic Waste. Rijeka, Croatia: IntechOpen,2012.
[32] Zhang Dongguang, Chen Yuxiang, Ma Yunhai, et al. Earthworm epidermal mucus: Rheological behavior reveals drag-reducing characteristics in soil[J]. Soil and Tillage Research, 2016, 158(1): 57-66.
[33] Ma Yunhai, Tong Jin, Yang Yinsheng. Statistical analysis of experimental condition effects on free abrasive wear of UHMWPE[J]. Journal of Materials Science, 2004, 39(10): 3453-3456.
[34] 刘朝宗,任露泉,佟金,等. 超高分子量聚乙稀(UHMWPE)及其复合材料的土壤粘附[J]. 农业工程学报,1998,14(4):43-47.
Liu Chaozong, Ren Luquan, Tong Jin, et al. Soil adhesion of UHMWPE and its composite materials[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1998, 14(4): 43-47. (in Chinese with English abstract)
Experiment and optimization of sub-soil liquid fertilizer injection device
Zhang Dongguang1,2, Zuo Guobiao3, Tong Jin4, Zhang Zhihong3※
(1.030024; 2.030031; 3.650500; 4.130025)
In recent years, subsoiling has been proposed as an alternative means of applying fertilizer into infertile subsoils. It was believed that root growth in the subsoiled channels would be stimulated in this way, and yields would be further increased as a result of the deep-placed fertilizer and better growing conditions. Filed test results from different cultivation areas increasingly have showed that subsoil fertilization resulted in increased crop yields when compared with subsoiling alone. However, two of the disadvantages associated with sub-soil liquid fertilizer application system is the severe soil adhesion phenomenon and high draft requirement, which seriously deteriorate operating quality and restrict its field application. To optimize sub-soil liquid fertilizer injection device, mitigate the problems mentioned above and then extend sub-soil liquid fertilizer application, the technical approach of bionic engineering was adopted. From the perspective of natural environment, the interactions of living organisms with natural surroundings have led to the evolution of biological systems and environmental adaptabilities. Earthworms have long been acknowledged to largely contribute to the aggregate stability of soils varying in texture, carbonate, and concentration of organic matter by burrowing, foraging, and casting on the soil surface and within the soil. Earthworms can readily move in moist or adhesive soil with soil particles seldom adhering to bodies. From the perspective of bionic engineering, the excellent properties of earthworm could be used to inspire the design and optimization of sub-soil liquid fertilizer injection device. One of the mechanisms of reducing soil adhesion for earthworms was that earthworms possess special geometrical structure on their heads and epidermis. The profile curves of earthworm head and body surface were extracted and fitted. Geometric structure surface of sub-soil liquid fertilizer injection device was designed based on the contour curve equations, and the structural parameters were determined. In order to explore the influence of working parameters on working resistance and soil adhesion during the operation of sub-soil liquid fertilizer injection device, and to optimize its operating parameters. Eventually, in the hope of ensuring and improving the working quality of the sub-soil liquid fertilizer injection device. In this study, the Box-Behnken experimental optimum design methods were used. The working parameters of tillage depth, flow rate and speed were chosen as independent variable, to evaluate the effects on response values of drag-reducing and anti-soil adhesion. By building an agricultural soil tank test platform system, the field operating environment were simulated. Then, optimization tests of working parameters of the sub-soil liquid fertilizer injection device were conducted. After that, the multivariate quadratic polynomial regression equations were built. According to the relationship between the independent variable and the response value, the working parameters of the sub-soil liquid fertilizer injection device were optimized. The results showed that the regression equation model based on soil adhesion and working resistance was adequate. It was found that the working parameters of tillage depth, flow rate and speed influenced drag resistance and soil adhesion significantly. Tillage depth and speed presented interaction effects, which influenced drag resistance and soil adhesion with high significance. The significant influences of the experimental factors for drag resistance and soil adhesion were as follows: the tillage depth, speed and flow rate. The working parameters were optimized as follows: the tillage depth was 11 cm, speed was 1.0 m/s, flow rate was 350 g/s. Under the above conditions, the mean value of the drag resistance of the selected bionic prototype was 260.01 N, the mean weight of soil adhesion was 8.73 g. This study can provide technical references for the mechanization of sub-soil fertilizing engineering.
bionics; design; earthworm; geometrical structured surface; sub-soil liquid fertilizer injection device; optimization
张东光,左国标,佟 金,张智泓. 仿生注液沃土装置工作参数的优化与试验[J]. 农业工程学报,2020,36(1):31-39.doi:10.11975/j.issn.1002-6819.2020.01.004 http://www.tcsae.org
Zhang Dongguang, Zuo Guobiao, Tong Jin, Zhang Zhihong. Experiment and optimization of sub-soil liquid fertilizer injection device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 31-39. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.01.004 http://www.tcsae.org
2019-06-16
2019-09-16
国家自然科学基金青年基金项目(51805356,51605210);山西省自然科学基金(201701D12111209);土壤环境与养分资源山西省重点实验室开放基金(2016003)
张东光,博士,副教授,从事机械仿生学理论与技术的研究。Email:zhangdongguang@tyut.edu.cn
张智泓,博士,副教授,从事农机具触土部件仿生技术的研究。Email:zzh_0822@hotmail.com。
10.11975/j.issn.1002-6819.2020.01.004
TB17
A
1002-6819(2020)-01-0031-09
猜你喜欢
玩具世界(2022年2期)2022-06-15
昆明医科大学学报(2021年12期)2021-12-30
房地产导刊(2021年8期)2021-10-13
少儿美术(2020年6期)2020-12-06
英语文摘(2020年10期)2020-11-26
出版人(2020年4期)2020-11-14
作文周刊·小学一年级版(2020年8期)2020-05-11
Medical Data Mining(2019年4期)2019-04-05
学生天地·小学低年级版(2018年10期)2018-12-15
学生天地(2018年30期)2018-10-17
