多关节机器人的反步法控制及仿真研究
2020-03-13 20:58李鹏高述勇杨杰迟洁茹
青岛大学学报(工程技术版) 2020年1期
关键词:稳定性
李鹏 高述勇 杨杰 迟洁茹

摘要: 针对关节型机器人的轨迹跟踪控制问题,本文设计了基于反步法的控制器。利用反步法将复杂的非线性机器人系统分解成两个子系统,借助Lyapunov函数设计中间虚拟控制量,一直后推到整个系统,获取控制系统实际的控制律,同时利用积分环节将每个子系统串联起来,从而形成对整个系统的控制,并利用Lyapunov稳定性定理,证明了系统的稳定性。同时,以两自由度关节型机器人为研究对象,搭建仿真控制系统进行仿真分析。仿真结果表明,反步法控制不仅具有良好的动态和稳态性能,而且鲁棒性较强,说明该控制方法的轨迹跟踪控制有效可行。该研究具有良好的应用前景。
关键词: 关节型机器人; 反步法控制; 跟踪控制; 稳定性
中图分类号: TP242.2 文献标识码: A
收稿日期: 2018-11-27; 修回日期: 2019-09-20
作者简介: 李鹏(1991-),男,山东临沂人,硕士研究生,主要研究方向为测控技术及智能仪器。
通信作者: 杨杰(1967-),男,山东青岛人,副教授,硕士生导师,主要研究方向为测控技术及智能仪器。Email: jackiey69@sina.com
关节型机器人(即机械手臂),是工业领域中应用最广泛的机器人类型之一,在装配、搬运、焊接等工业领域发挥着重要的作用[1]。但由于机器人系统是一种复杂的非线性系统,耦合性强,传动的转矩控制以及PID等控制方法已经难以满足工业化快速发展对机器人控制精度和速度的要求[2]。由于现代智能控制的快速发展,其在控制速度和精度上已远远高于传统控制,但是在现代智能控制中仍然存在一些问题[3-4]。模糊控制无需建立精确的数学模型,鲁棒性较强,但是在实际控制中却存在稳态精度不够的问题[5-8]。反馈线性化控制能够将复杂的非线性系统解耦,线性化准确度高,但是易受外界干扰,鲁棒性较差[9-10];无源控制具有全局稳定性且不存在奇异点等优点,但是一般只能借助阻尼的注入来设计控制器,使用其他方法,控制系统的稳定性将难以得到保证,且期望的哈密顿函数、互联矩阵以及阻尼矩阵比较复杂[11-14];反步法,即后推法,通过设计虚拟控制律保证系统内核在稳定性等方面的性能,并通过不断的修正虚拟控制律,实现系统的快速稳定的跟踪,控制系统的搭建和系统的稳定性分析比较简单,控制系统的动、静性能优良。潘月斗等人[15]将反步法应用到矩阵变换器输入侧电流的控制,实现在负载变化存在的情况下对输入侧电流的快速跟踪,有效的提高了控制系统的鲁棒性;刘燕斌等人[16]将反步法应用到高超音速飞机纵向逆飞行控制中,实现了在具有严重非线性、强耦合的飞机纵向飞行控制以及对外界干扰的抑制,且能够保证系统的全局稳定性;贺跃帮等人[17]将反步法应用到无人直升机的跟踪控制中,实现了外界干扰以及建模误差等存在情况下的轨迹跟踪控制,使控制系统具有较强的鲁棒性。基于此,本文设计了基于反步法的控制器,借助Lyapunov函数得到控制系统实际的控制律,同时利用Lyapunov稳定性定理,分析了控制系统的稳定性,并以二自由关节型机器人为研究对象,搭建了机器人仿真控制系统,验证了反步法控制的有效性。
1 关节型机器人系统
对具有n个关节的刚性关节型机器人,其动态方程可用如下二阶非线性微分方程描述[18]为
τ=M(q)+C(q,)(1)
式中,τ∈Rn为控制力矩;∈Rn为关节角位置矢量;∈Rn为关节角速度矢量;q∈Rn为关节角加速度矢量;M(q)∈Rn×n为机器人惯性矩阵;C(q,)∈Rn为机器人哥氏力与向心力矩阵。
2 关节型机器人反步法控制器设计
关节机器人的控制问题是指利用各关节的控制量,使各个关节能够在较短的时间内跟踪输入信号,同时保证控制输出的稳定性。定义如下非线性控制系统
1=f1(x1)+x22=f2(x1,x2)+x3i=fi(x1,…,xi)+xi+1n=fn(x1,…,xn-1,xn)+u(2)
式中,x为系统的状态向量;u=u(x)控制系统的反馈控制输入。
反步法的基本思想是通过将每个子系统i中的xi+1作为虚拟控制量,并通过适当的虚拟反馈xi+1=αi(i=1,2,…,n),使前面的状态达到渐进稳定。但由于一般难以满足xi+1=αi,因此需要引入误差,从而通过控制作用保证xi+1与αi之间渐进稳定[19-20]。
利用系统的状态与虚拟反馈,定义n个误差为
e1=x1e2=x2-α1(x1)en=xn-αn-1(x1,x2,…,xn-1)(3)
式中,αi(i=1,2,…,n)为待定。通过Lyapunov函数构造,可以使每一个状态分量能够渐进的稳定。
为了便于使用反步法,定义机器人控制系统的状态向量x1=q,x2=,系统的输出y=x1,则非线性系统(1)可以表示为
1=x22=M-1(x1)τ-M-1(x1)Cx2y=x1(4)
采用反步法,设计关节型机器人控制器,其步骤如下:
步骤1 定義关节型机器人控制系统的输出误差为
e1=y-yd(5)
其中,yd为控制系统期望的输出。对式(5)求导,可得
1=1-d=x2-d(6)
定义第1个子系统的虚拟控制量为
α1=-c1e1+d(7)
其中,c1为可调整的参数,且c1>0。
定义关节型机器人的虚拟控制误差为
e2=x2-α1(8)
对第1个子系统定义Lyapunov函数为
V1=12e21(9)
则对式(9)求导,并结合式(6)可得
1=e11=e1(x2-d)=e1(e2+α1-d)(10)
将式(8)代入式(10)可得
1=-c1e21+e1e2(11)
如果e2=0,则1≤0,为此,进行下一步设计。
步骤2 对式(8)求导,并结合式(4)可得
2=M-1(x1)τ-M-1(x1)Cx2-1(12)
对第2个子系统定义Lyapunov函数为
V2=V1+12e22(13)
对式(13)求导可得
2=1+e22=-c1e21+e1e2+e22=-c1e21+e1e2+e2(M-1(x1)τ-M-1(x1)Cx2+c11-d1)(14)
为使2≤0,设计关节型机器人控制器的实际控制律为
τ=Cx2+M(x1)d-M(x1)c11-M(x1)e1-c2e2(15)
其中,c2为可调整的参数,且c2>0。则
2=-c1e21-c1e22≤0(16)
关节型机器人控制律的设计满足Lyapunov稳定性定理的条件,使e1和e2渐进稳定,从而可以保证系统具有全局的渐进稳定。
3 仿真实验
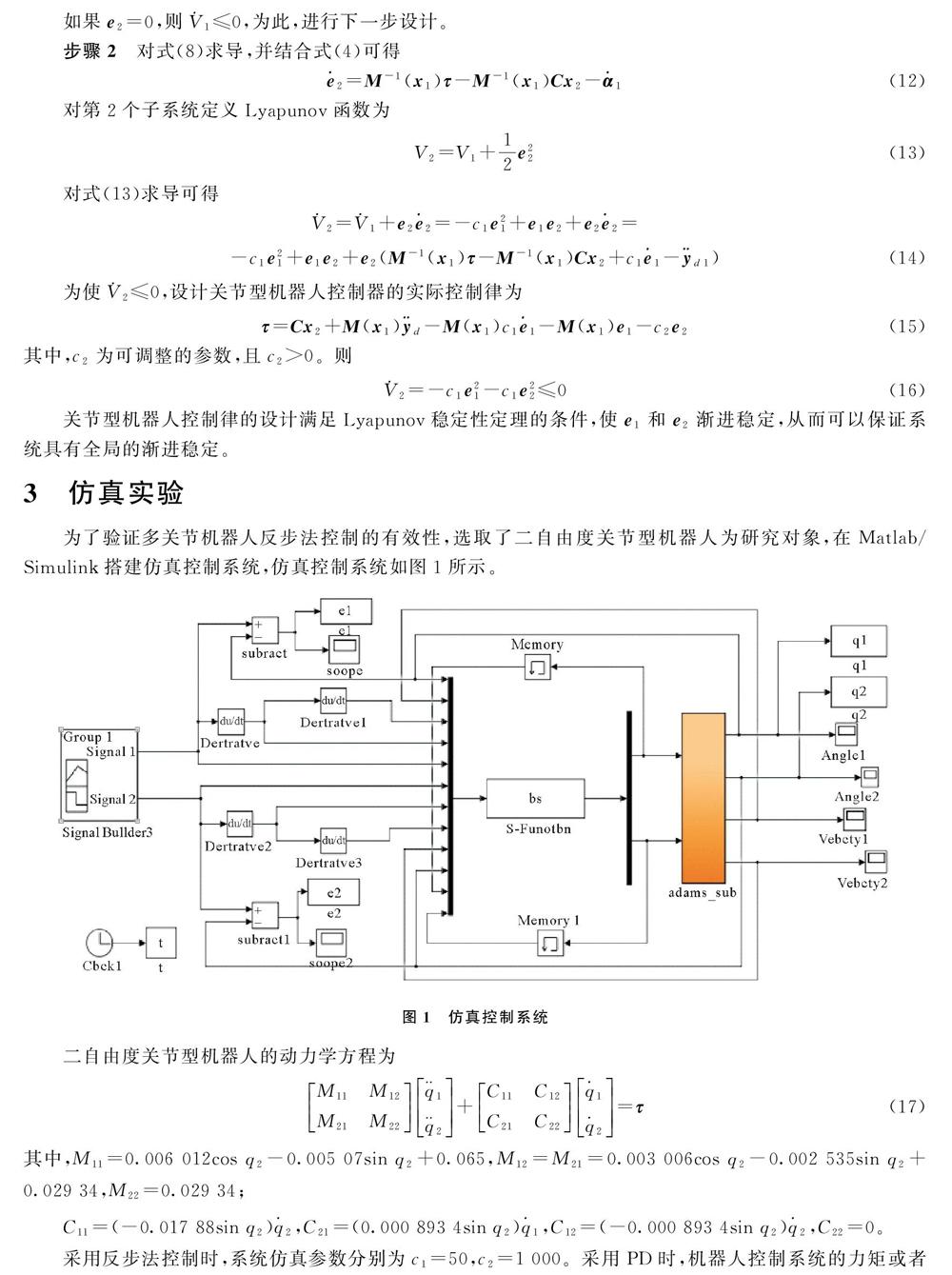
为了验证多关节机器人反步法控制的有效性,选取了二自由度关节型机器人为研究对象,在Matlab/Simulink搭建仿真控制系统,仿真控制系统如图1所示。
二自由度关节型机器人的动力学方程为
M11M12M21M2212+C11C12C21C2212=τ(17)
其中,M11=0.006 012cos q2-0.005 07sin q2+0.065,M12=M21=0.003 006cos q2-0.002 535sin q2+0.029 34,M22=0.029 34;
C11=(-0.017 88sin q2)2,C21=(0.000 893 4sin q2)1,C12=(-0.000 893 4sin q2)2,C22=0。
采用反步法控制时,系统仿真参数分别为c1=50,c2=1 000。采用PD时,机器人控制系统的力矩或者力控制输出为
τ=kpe+kd(18)
其中,τ为控制力矩或力;e为轨迹跟踪误差;kp为比例系数;kd为微分系数。
给定关节型机器人旋转关节1和关节2的期望角度为qr1=qr2=1。采用反步法控制时,反步法控制关节1期望轨迹与实际轨迹如图2所示,反步法控制关节2期望轨迹与实际轨迹如图3所示。由图2和图3可以看出,反步法控制的跟踪速度较快,能够较快的到达稳态,而且到达稳态后,反步法控制的稳态精度较高,说明反步法控制具有良好的动态和稳态性能。
采用PD控制时,PD控制关节1期望轨迹与实际轨迹如图4所示,PD控制关节2期望轨迹与实际轨迹如图5所示。由图4和图5可以看出,PD控制的跟踪速度比反步法控制跟踪速度慢,且达到稳态时,PD控制比反步法控制的稳态精度低。
当t=0.6 s时,施加一个持续时间为0.01 s的干扰后,采用反步法控制时,干扰对反步法控制关节1轨迹曲线的影响如图6所示,干扰对反步法控制关节2轨迹曲线的影响如图7所示。
由图6和图7可以看出,在给各关节施加干扰后,采用反步法控制的波形波动较小,再次达到稳态所用的时间较短,说明反步法控制具有较强的鲁棒性。
采用PD控制時,干扰对PD控制关节1轨迹曲线的影响如图8所示,干扰对PD控制关节2轨迹曲线的影响如图9所示。由图8和图9可以看出,采用PD控制的波形波动比反步法控制大,再次达到稳态所用的时间比反步法控制长。
由以上仿真结果可知,反步法控制具有更好的动态和稳态性能,且控制系统能够更明显的减弱外界干扰对机器人控制系统输出的影响,鲁棒性更强,说明该控制方法有效,符合设计的要求。
4 结束语
本文针对多关节机器人的轨迹跟踪控制,提出了反步法控制。选取二自由度关节型机器人为研究对象,在Matlab/Simulink中搭建控制系统,进行仿真实验,并将反步法控制与传统的PD控制进行比较。仿真结果表明,当系统存在外界干扰时,与传统的PD控制相比,反步法控制系统的输出波形变化较小,说明反步法控制能够更强的抑制外界干扰影响,具有更强的鲁棒性;同时与传统PD控制相比,反步法控制的输出能够更快的跟踪输入信号,且稳态精度更高,说明反步法控制具有更好的动态和稳态性能,因此该控制方法是可行有效的。
參考文献:
[1] 陈培华, 曹其新. 基于逆动力学方法的关节型机器人轨迹控制[J]. 华中科技大学学报: 自然科学版, 2013, 41(z1): 17-20, 24.
[2] 夏长亮, 张天一, 周湛清, 等. 结合开关表的三电平逆变器永磁同步电机模型预测转矩控制[J]. 电工技术学报, 2016, 31(20): 83-92, 110.
[3] Chen F Y, Jiang R Q, Zhang K K, et al. Robust backstepping slidingmode control and observerbased fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056.
[4] Li S S, Wang Y N, Tan J H, et al. Adaptive RBFNNs/integral sliding mode control for a quadrotor aircraft[J]. Neurocomputing, 2016, 216: 126-134.
[5] 胡包钢, 应浩. 模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报, 2001, 27(4): 567-584.
[6] 余跃庆, 梁浩, 张卓. 平面4自由度欠驱动机器人的位置和姿态控制[J]. 机械工程学报, 2015, 51(13): 203-211.
[7] 郭伟斌, 陈勇. 基于模糊控制的除草机器人自主导航[J]. 机器人, 2010, 32(2): 204-209.
[8] 李鹏, 杨杰, 牛欢. 二自由度机器人模糊滑模位置控制及仿真[J]. 青岛大学学报: 工程技术版, 2017, 32(2): 102-107.
[9] 吕学勤, 张轲, 吴毅雄, 等. 轮式移动焊接机器人输出反馈线性化控制[J]. 机械工程学报, 2014, 50(6): 48-54.
[10] 赖旭芝, 蔡畅, 吴敏, 等. 基于部分反馈线性化的三杆体操机器人控制策略[J]. 高技术通讯, 2009, 19(12): 1270-1275.
[11] 钱甜甜, 苗世洪, 刘子文, 等. 基于PCHD模型的VSCHVDC的无源控制及滑模辅助改进控制[J]. 电工技术学报, 2016, 31(3): 138-144.
[12] 鲁伟, 徐长波, 李春文, 等. 并联混合有源滤波器哈密顿系统建模及无源控制[J]. 控制理论与应用, 2012, 29(11): 1397-1402.
[13] 程启明, 郭凯, 程尹曼, 等. 电压不平衡下双馈感应发电机机侧变换器无源控制方法[J]. 电力系统自动化, 2016, 40(19): 73-81.
[14] 刘英培, 梁海平, 栗然, 等. 基于无源性与自抗扰控制的双馈风力发电系统研究[J]. 电工技术学报, 2015, 30(18): 121-130.
[15] 潘月斗, 郭凯, 陈继义, 等. 矩阵变换器输入侧电流的反步法控制[J]. 华南理工大学学报: 自然科学版, 2015, 43(12): 18-24, 47.
[16] 刘燕斌, 陆宇平. 基于反步法的高超音速飞机纵向逆飞行控制[J]. 控制与决策, 2007, 22(3): 313-317.
[17] 贺跃帮, 裴海龙, 周洪波, 等. 干扰下的无人直升机自适应反步法鲁棒跟踪控制[J]. 控制理论与应用, 2013, 30(7): 834-843.
[18] 賈凯凯, 梅江平, 刘松涛, 等. 4自由度并联机构刚体动力学模型[J]. 机械工程学报, 2016, 52(13): 10-16.
[19] Nikdel N, Badamchizadeh M A, Azimirad V, et al. Adaptive backstepping control for an ndegree of freedom robotic manipulator based on combined state augmentation[J]. Robotics & Computer Integrated Manufacturing, 2017, 44: 129-143.
[20] Yacef F, Bouhali O, Hamerlain M, et al. Observerbased adaptive fuzzy backstepping tracking control of quadrotor unmanned aerial vehicle powered by liion battery[J]. Journal of Intelligent & Robotic Systems, 2016, 84(1/4): 1-19.
Control and Simulation of MultiLink Robots Based on Backstepping
LI Penga, GAO Shuyonga, YANG Jiea, CHI Jierub
(a. School of Electromechanic Engineering; b. School of Electronic Information, Qingdao University, Qingdao 266071, China)
Abstract: Aiming at the tracking control of multilink robots, a controller based on backstepping is designed. Backstepping method can decompose the nonlinear robot system into two subsystems. And by the use of Lyapunov function, we can design inter virtual control variables, until back to the whole system. Then by the use of the Lyapunov function, we can obtain the actual control law of the control system. Each subsystem is connected in series by the use of integral part, thus it can realize the control of entire system. The Lyapunov stability theorem is used to prove the stability of the system. The simulation results show that the backstepping method not only has good dynamic and steadystate performance, but also has strong ability to suppress the external interference. The simulation results indicate that the trajectory tracking control of backstepping is effective and feasible. The control method has a good application prospect.
Key words: multilink Robots; backstepping control; tracking control; stability
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
上海师范大学学报·自然科学版(2022年3期)2022-07-11
交通科技与管理(2022年8期)2022-05-07
交通科技与管理(2022年8期)2022-05-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
求知导刊(2017年22期)2017-10-13