电控空气悬架车辆自适应前照灯控制策略研究
2020-03-13 20:58贾兆功滕利卫孙富权严天一
青岛大学学报(工程技术版) 2020年1期
关键词:控制策略
贾兆功 滕利卫 孙富权 严天一
摘要: 为有效提高前照灯夜间照明效果,本文在充分考虑国标GB7258《机动车运行安全技术条件》基础上,根据车身高度、车速等信号变化,提出一种自适应前照灯系统(adaptive frontlight system,AFS)的新型前照灯垂向控制策略,以合理调节其夜间照射角度。同时,采用Matlab/Simulink和Stateflow软件,建立前照灯垂向控制策略模型,并对车辆在加速工况和减速工况条件下进行仿真分析。仿真结果表明,在车辆高度变化及车辆加速情况下,所提出的控制策略模型可有效调节前照灯照射角度,提高驾乘安全性;在车辆高度变化及减速条件下,所提出的控制策略模型亦可实时有效地调节前照灯照射角度,改善驾乘人员夜间行驶安全性。该研究可有效提高电控空气悬架系统车辆夜间行车安全性。
关键词: 电控空气悬架系统; 自适应前照灯系统; 夜间行车安全性; 照射角度; 控制策略
中图分类号: U463.65+1 文献标识码: A
收稿日期: 2019-10-03; 修回日期: 2019-12-21
基金项目: 山东省自然科学基金资助项目(ZR2016EEM49);国家自然科学基金资助项目(50905090)
作者简介: 贾兆功(1993-),男,硕士研究生,主要研究方向为汽车动态仿真与控制。
通信作者: 严天一(1970-),男,工学博士,教授,主要研究方向为车辆系统动力学及其控制策略。Email: yan_7012@126.com
传统汽车照明系统主要由前照灯系统、信号照明系统、车内照明系统三大部分组成。灯光作为夜间行车最有效的信息载体,能够使驾乘人员清楚掌握交通状况,据此判断可能存在的各种危险,并及时采取相应规避措施。由于传统前照灯系统仅具有两种固定的远光灯照明与近光灯照明模式,无法根据各种行驶工况自动调整前照灯照射角度,因此难以满足现代高端车辆高速夜间行驶安全要求。AFS是一种智能控制系统,其能够根据驾驶操作、行驶工况、路面状况等信息,自动调节前照灯照射角度,以有效提升夜间行车安全性和驾乘舒适性[1-2]。S. Grazioli等人[3]通过建立两自由度车辆模型、前光轴水平偏转模型及步进电机模型,提出了基于增量式比例积分微分(proportionalintegralderivative,PID)控制算法的自适应前照灯系统,并进行了相关仿真研究;M. Giradkar等人[4]在建立车辆二自由度转弯模型、横向作用模型的基础上,开发了弯道自适应前照灯控制算法;武汉等人[5]提出以数字微镜元件为核心,采用第二导光管、可收集未利用光能的自适应前照灯光学方案,并利用专业光学软件对整个系统进行仿真研究;戎辉等人[6]根据自适应前照灯系统的功能需求,建立了车辆参数与灯光轴沿水平和垂直两个方向的偏转角度之间的理论模型及自适应前照灯系统的运动学模型,并开展了相关试验验证;李礼夫等人[7]构建了自适应前照灯的夜间转弯模式的数学模型,并仿真验证了该模型的正确性。电控空气悬架系统是由电子控制单元、高度传感器、压力传感器、车速传感器、电动气泵、组合电磁阀、空气弹簧、储气筒等部件组成,可有效提高平顺性、燃油经济性及通过性等[8]。电控空气悬架系统可根据车速等信号对各空气弹簧进行充气和放气,从而调节车身高度,但也造成夜间行车时前照灯照射角度发生明显变化,若不对其照射角度进行合理调整,必将降低夜间行车安全性。目前,国内在电控空气悬架车辆的AFS系统控制策略研究尚处于起步阶段,亟待深入研究。基于此,本文主要对电控空气悬架车辆自适应前照灯控制策略进行研究,分析电控空气悬架系统对前照灯照射角度的影响,提出并仿真验证一种新型AFS控制策略,可使夜间前照灯照射角度调节实现最优状态。该研究为驾乘人员夜间驾驶车辆提供了最佳的照明效果及行车安全性。
1 AFS系统组成及其工作原理
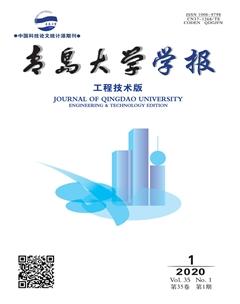
AFS系统在综合分析车身高度、车速等信号基础上,利用其核心控制算法,确定在各行驶工况下前照灯最佳照射角度,并借助照射角度调节执行机构,实现最佳的照射角度,最终提高夜间行车安全性[9-11]。
典型AFS系统主要由传感器模块、控制模块及相关执行机构等组成。其中,传感器模块主要包括车身高度传感器、车速传感器等;控制模块主要指电子控制单元;执行机构为调节照射角度的步进电机及其传动机构等[12-13],AFS系统的组成如图1所示。
2 AFS系统理论建模
2.1 垂向照射角度调节算法
根据国标GB7258《机动车运行安全技术条件》规定,在检验乘用车远光照射位置时,对于能单独调整远光光束的前照灯,当其照射在正前方L=10 m处的屏幕上时,屏幕光束中心离地高度应处于0.85H~
0.95H,其中H为前照灯基准中心高度。
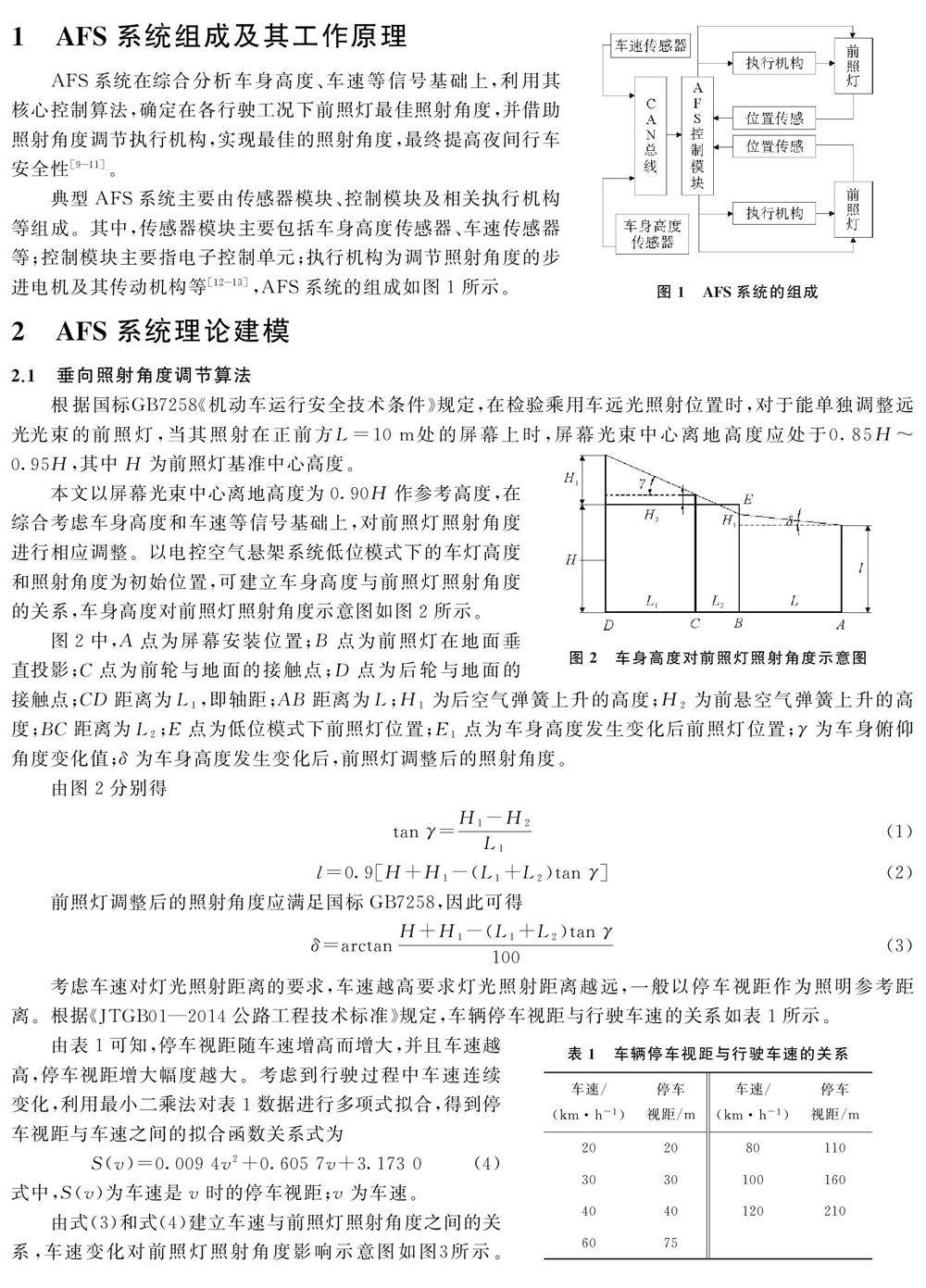
本文以屏幕光束中心离地高度为0.90H作参考高度,在综合考虑车身高度和车速等信号基础上,对前照灯照射角度进行相应调整。以电控空气悬架系统低位模式下的車灯高度和照射角度为初始位置,可建立车身高度与前照灯照射角度的关系,车身高度对前照灯照射角度示意图如图2所示。
图2中,A点为屏幕安装位置;B点为前照灯在地面垂直投影;C点为前轮与地面的接触点;D点为后轮与地面的接触点;CD距离为L1,即轴距;AB距离为L;H1为后空气弹簧上升的高度;H2为前悬空气弹簧上升的高度;BC距离为L2;E点为低位模式下前照灯位置;E1点为车身高度发生变化后前照灯位置;γ为车身俯仰角度变化值;δ为车身高度发生变化后,前照灯调整后的照射角度。
由图2分别得
tan γ=H1-H2L1(1)
l=0.9[H+H1-(L1+L2)tan γ](2)
前照灯调整后的照射角度应满足国标GB7258,因此可得
δ=arctanH+H1-(L1+L2)tan γ100(3)
考虑车速对灯光照射距离的要求,车速越高要求灯光照射距离越远,一般以停车视距作为照明参考距离。根据《JTGB01—2014公路工程技术标准》规定,车辆停车视距与行驶车速的关系如表1所示。
由表1可知,停车视距随车速增高而增大,并且车速越高,停车视距增大幅度越大。考虑到行驶过程中车速连续变化,利用最小二乘法对表1数据进行多项式拟合,得到停车视距与车速之间的拟合函数关系式为
S(v)=0.009 4v2+0.605 7v+3.173 0(4)
式中,S(v)为车速是v时的停车视距;v为车速。
由式(3)和式(4)建立车速与前照灯照射角度之间的关系,车速变化对前照灯照射角度影响示意图如图3所示。
由于车身高度变化,适当调节后,前照灯照射到路面上的位置为F点;如果车速也发生变化,经再调节后,前照灯照射到路面上的位置为G点;车身高度变化后,车速再发生变化,导致前照灯附加调节的照射角度为ζ;综合考虑车身高度变化与车速对停车视距的要求,θ为前照灯调节后的照射角度。
根据图3,空气弹簧调节后停车视距BF=100 m,取车身高度变化所引起前照灯照射距离与停车视距相等时,由式(4)可得v≈75 km/h。故当v<75 km/h时,S(v)<100 m,停车视距小于车身高度变化后前照灯照射的距离,此时无须再因车速变化调整前照灯的照射角度;当v>75 km/h时,S(v)>100 m,此时停车视距大于车身高度变化后的前照灯照射的距离,因此前照灯照射角需要再调整ζ,以满足停车视距的要求。需要向上调整的角度大小为ζ,结合图3可得
ζ=δ-arctanH+H1-(L1+L2)tan γS(v)(5)
将式(4)代入式(5)可得
ζ=δ-arctanH+H1-(L1+L2)tan γ0.009 4v2+0.605 7v+3.173 0(6)
综合考虑车身高度以及车速对前照灯照射角度的影响,则
θ=δ-ζ=arctanH+H1-(L1+L2)tan γ0.009 4v2+0.605 7v+3.173 0(7)
2.2 执行机构建模
本文所研究的AFS执行机构以两相混合式步进电机驱动,该步进电机具有运行稳定、可实现高精度定位控制的特点,广泛用于高精度控制领域[14]。其数学模型主要包括电压方程、电磁转矩方程和机械运动方程[15-16]。
两相电压方程分别为
uA=RiA+LdiAdt+eA(8)
uB=RiB+LdiBdt+eB(9)
式中,uA与uB分别为A相绕组与B相绕组的电压;R为定子绕组阻值;iA与iB分别为A相和B相绕组的电流;L为定子绕组自感系数;eA与eB分别表示A相和B相定子线圈反电动势,其表达式分别为
eA=-PΨmsin(Pθm)dθmdt(10)
eB=-PΨmsinPθm-π2dθmdt(11)
式中,P为磁极对数;Ψm为最大磁链;θm为转子角位移。
电磁转矩方程为
Te=-PΨmsin(Pθm)-PΨmsinPθm-π2-Tdmsin(2Pθm)(12)
式中,Te为电磁转矩;Tdm为定位力矩。
机械运动方程为
Te=Jdωdt+Bω+Ti(13)
ω=dθmdt(14)
式中,J为转子转动惯量;ω为转子角速度;Β为粘滞阻尼系数;Ti为负载转矩。
3 控制策略模型
利用Simulink与Stateflow搭建控制策略模型,前照灯照射角度控制策略模型如图4所示,该模型包含电控空气悬架系统控制策略模块、角度计算模块与步进电机控制模块。
电控空气悬架系统控制策略模块包括空气悬架高度控制策略、组合阀与气泵模型。电控空气悬架高度控制策略模型利用Stateflow中提供的状态、转移、节点组件构建空氣悬架高度、车速实时监测的自动控制模块,根据当前车速通过组合阀与气泵对空气悬架进行充、放气,调节悬架高度。本文所提出的控制策略模型分为3种模式:当车速30 km/h
根据所建立的车身高度及车速对前照灯照射角度影响的数学方程,搭建Simulink模型,前照灯照射角度计算模型如图6所示。在空气悬架模式变换过程中,将图4输出的空气悬架高度值以及车速值作为输入信号,可计算得出前照灯照射角度期望值。其中,位置反馈模型简化了步进电机减速器及相关执行机构,由步进电机角位移等效计算出前照灯照射角度变化值,进而得到前照灯实际位置,并由前照灯实际角度与期望角度产生使步进电机动作的前照灯照射角度调整信号。
根据所建立的相关步进电机的理论方程,搭建步进电机仿真模型及其驱动器模型,步进电机控制模型如图7所示。将图6输出的前照灯照射角度调整信号输入至图7所示的步进电机控制模型中,并将前照灯照射角度调整到期望值。
4 仿真与分析
假设车辆在平直的B级路面上行驶,仅考虑悬架高度和车速变化对前照灯照射角度的影响,对前照灯照射角度进行垂向调整。其中,该车辆主要整车参数为:L1=2.900 m,L2=1.124 m,L=10.000 m,H=0.800 m。
电控空气悬架高度控制模式包括高位、中位和低位等模式,以低位模式为参考位置,中位模式车身高度距参考位置为60 mm;高位模式车身高度距参考位置为120 mm。各模式的调节误差为±5 mm。
利用Simulink Design Verifier自动生成测试用例,检查模型的邏辑设计及分支结构,开展结构型测试,并生成覆盖度分析报告,测试用例的覆盖度分析如图8所示,由图8可以看出,所建立的控制策略模型在静态验证中不存在模块冗余、设计错误等缺陷,模型稳健性较好[17-18]。为进一步验证控制策略的正确性及模型动态仿真性能,须对模型进行基于功能的测试[19-20]。
4.1 车辆加速工况时仿真
控制策略模型的测试用例如表2所示,由表2可知,执行条件为Mode=1时,控制策略模型处于使能状态,在0~20 s内,车辆处于高位模式,为Highmode状态,车身高度距参考位置的距离为120 mm;在20~70 s内,空气弹簧经过放气后,车辆由高位模式进入中位模式,并以Mediummode表示,车身高度降低至60 mm;在70~100 s内,空气弹簧再进一步放气后,车辆由中位模式进入低位模式,表示为Lowmode状态,车身高度降低至参考位置。
空气弹簧高度变化如图9所示。由图9可以看出,当t=20 s时,空气悬架系统进入模式切换状态,至t=25 s时,空气弹簧高度下降60 mm,空气悬架系统由高位模式切换为中位模式;在t=70 s时,空气悬架系统再次进入模式切换状态,至t=75 s时,空气弹簧高度再次降低60 mm,空气悬架系统由中位模式切换为低位模式,仿真结果符合预期要求。
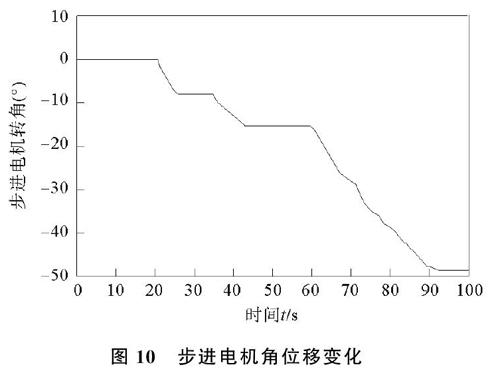
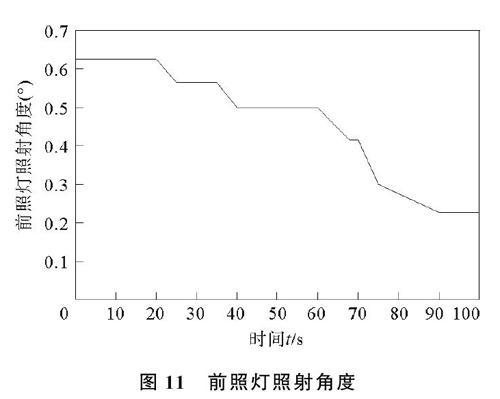
因为上述空气悬架高度变化,在前照灯照射角度计算模型中,产生步进电机转向控制信号与脉冲信号,将这两种信号输入到步进电机控制器模型中,控制步进电机执行相应动作,步进电机角位移变化如图10所示。经减速器及其他执行机构,最终使前照灯的照射角度得到合理调整,前照灯照射角度图如图11所示。
由表2、图9和图11可知,在0~20 s内,车身高度不变,车速较低不会对前照灯照射角度产生影响;在20~25 s,车身高度降低,故前照灯照射角度适当变小,但车速较低暂未对前照灯的角度产生影响;在25~35 s内,车身高度不变,车速仍未对前照灯照射角度产生影响;在35~40 s内,车速对前照灯照射角度开始产生影响,为使照射距离达到停车视距要求,前照灯照射角度适当变小,停车视距增大;在40~100 s内,角度的调整由车速和车身高度共同引起。因此,在表2所示的测试条件下,步进电机角位移变化(图10)与前照灯照射角度的变化(图11)符合预期要求,在车辆高度变化及车辆加速情况下,所提出的控制策略模型可有效调节前照灯照射角度,提高驾乘安全性。
4.2 车辆减速工况时仿真
控制策略模型的测试用例如表3所示。由表3可以看出,在0~30 s内,车辆处于低位模式;在30~80 s内,由低位模式转换至中位模式,空气弹簧经过充气后,车身高度上升60 mm;在80~100 s内,空气弹簧再次经过充气后,车身高度再次提升60 mm,由中位模式进入高位模式。
空气弹簧高度变化图如图12所示,由图12可以看出,仿真结果符合预期要求。
在表3所示测试条件下,前照灯照射角度计算模型可产生步进电机控制信号,并输入到步进电机控制器模型中,步进电机在脉冲信号及转向控制信号控制下执行相应动作,步进电机角位移图如图13所示,前照灯照射角度得到有效调整,前照灯照射角度图如图14所示。
由表3、图12及图14可知,在0~60 s内,车身高度和车速变化共同引起前照灯角度调整;在60~65 s内,虽然车身高度未发生变化,但车速降低,导致停车视距亦随之减小,故前照灯照射角度适当增加;在65~80 s内,车身高度保持稳定,车速变化已无法对前照灯照射角度产生影响,故前照灯照射角度不变;在80~85 s内,随着车身高度进一步变化,前照灯照射角度又适当的增加;在85~100 s内,车身高度保持不变,但车速较低,前照灯照射角度不变。因此,在表3所示的测试条件下,步进电机角位移变化(图13)与前照灯照射角度变化(图14)符合预期要求,在车辆高度变化及减速条件下,所提出的控制策略模型可实时有效地调节前照灯照射角度,改善驾乘人员夜间行驶安全性。
5 结束语
本文基于Simulink和Stateflow软件,建立了带有电控空气悬架系统的车辆自适应前照灯垂向控制策略模型,仿真验证了在耦合条件及各自独立条件下车身高度与车速的变化,所提出的控制策略对改善前照灯垂向照射角度是有效的。通过空气弹簧高度变化图、步进电机角位移图及对应的前照灯照射角度图可以看出,所提出的控制策略实时性及跟随性较好,可为改善空气悬架系统车辆自适应前照灯系统控制策略提供一定的参考依据。由于本文所提出的控制策略尚未涉及空气悬架车辆前照灯水平照射角度自适应调节的相关研究,因此前照灯水平照射角度调节控制策略及水平照射角度调节与垂向照射角度调节耦合条件下的控制策略研究是接下来的研究方向。
参考文献:
[1] PenaGarcia A, Pena P, Espin A, et al. Impact of adaptive frontlighting systems (AFS) on road safety: Evidences and open points[J]. Safety Science, 2012, 50(4): 945-949.
[2] 杜小芳, 赵永浩, 徐文婷, 等. 汽车自适应前照灯系统AFS的控制策略研究[J]. 武汉理工大学学报: 交通科学与工程版, 2016, 40(4): 646-650.
[3] Grazioli S, Minisini R, Franzosi L, et al. Modeling and simulation on auto adaptive frontlight system[J]. Computer Simulation, 2011, 28(10): 349-353.
[4] Giradkar M, Khanapurkar M. Design and implementation of adaptive front light system of vehicle using FPGA based LIN controller[C]∥International Conference on Emerging Trends in Engineering and Technology. Port Louis: IEEE, 2011: 258-261.
[5] 武漢, 朱向冰, 朱骞, 等. 数字微镜元件式自适应前照灯光学设计[J]. 红外与激光工程, 2013, 42(4): 955-959.
[6] 戎辉, 龚进峰, 曹健. 自适应前照灯运动学建模及系统开发[J]. 汽车工程, 2008, 30(12): 1079-1082.
[7] 李礼夫, 邓前. 汽车自适应前照灯转弯模式的数学模型研究[J]. 汽车技术, 2010(10): 43-46.
[8] 严天一, 刘欣强, 张鲁邹, 等. 基于代码生成的电控空气悬架系统电子控制单元[J]. 农业机械学报, 2014, 45(9): 14-19.
[9] 杨明俊. 面向动态配光光型的汽车AFS前照灯转角控制方法研究[D]. 广州: 华南理工大学, 2015.
[10] 王洪佩, 高松, 宋炳雨, 等. 汽车自适应前照灯系统建模与仿真[J]. 计算机仿真, 2011, 28(10): 349-353.
[11] 李祥兵. 汽车自适应前大灯系统仿真实验平台研究[D]. 武汉: 武汉理工大学, 2010.
[12] 钱向明. 车用自适应前照灯系统设计与研究[J]. 机电工程, 2010, 27(7): 104-107.
[13] 张晓鸣. 汽车自适应前照灯系统的设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2014.
[14] 邓前. 基于主动安全的汽车自适应前照灯控制方法研究[D]. 广州: 华南理工大学, 2011.
[15] 周一飛. 基于Simulink的步进电机控制系统仿真[D]. 成都: 西南交通大学, 2014.
[16] 余驰, 李健仁, 张刚峰. 两相混合式步进电机建模与仿真[J]. 兵工自动化, 2016, 35(2): 48-51.
[17] 赵鹤, 高婉玲. 基于模型的软件测试用例生成方法比较研究[J]. 现代计算机(专业版), 2017, 4(5): 20-26.
[18] 谢晓东. 基于模型比较的软件测试用例生成方法研究[D]. 武汉: 华中科技大学, 2007.
[19] 蔡峰, 周毅, 陈阳. 基于MBD模型自动生成测试用例的软件测试方法[J]. 实验与测试, 2018, 37(9): 77-80.
[20] 李哲帅. 基于ISO_26262标准的高压共轨ECU控制模型设计及测试研究[D]. 杭州: 浙江大学, 2018.
Research on Control Strategy of an Adaptive FrontLight System of Vehicles with ElectronicallyControlled Air Suspensions
JIA Zhaogong, TENG Liwei, SUN Fuquan, YAN Tianyi
(School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China)
Abstract: In order to improve ride comfort, fuel economy and trafficability, the electronic controlled air suspension vehicle must charge and deflate the air spring, but this will cause a significant change in the headlamp irradiation angle. If the irradiation angle is not adjusted reasonably, it will inevitably reduce the night driving safety. In order to improve the night lighting effect of headlamp, a vertical adjustment control strategy of headlamp illumination angle of adaptive headlamp system (AFS) is proposed based on the technical requirements of the national standard GB7258 "Technical Conditions for Safety of Motor Vehicle Operation", and the signal changes of body height and speed, to reasonably adjust the illumination angle of headlamp. The control strategy model is established by using MATLAB/Simulink and Stateflow, and simulation is taken. The simulation results show that the proposed control strategy can improve the night driving safety of the vehicle with electronic air suspension system.
Key words: electronically controlled air suspension system; adaptive frontlight system; night driving safety; headlamp angle adjustment; control strategy
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
电子乐园·上旬刊(2021年7期)2021-07-19
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
电子技术与软件工程(2016年22期)2016-12-26
商场现代化(2016年29期)2016-12-23
中国经贸(2016年20期)2016-12-20