纯电动汽车速比DOE与多目标优化研究
2020-03-13 20:58王聪聪张洪信赵清海贾腾飞侯典平
青岛大学学报(工程技术版) 2020年1期
王聪聪 张洪信 赵清海 贾腾飞 侯典平
摘要: 针对纯电动汽车的驱动电机特有的转速转矩特性,使电动汽车变速箱不需要太多挡位的问题,本文在某款电动汽车基础上,对传动比进行初步匹配,运用实验设计(design of experiments,DOE)对传动比进行分析,并对传动比进行多目标优化。优化结果表明,优化后的电机转矩较优化前减小,传动比的改变可以使电机的转矩趋于更加合理的区间,避免了大转矩低需求的能耗浪费现象,优化后,最高车速提升了5.6 km/h,在0~100 km/h时,加速时间增加了3.7 s,最大爬坡度减少了7.7%,但是百公里油耗减少了2.4 kWh,说明最高车速比优化前略有提高,百公里能量消耗比优化前略有减少,该结果满足预期设置的动力性指标,且提高了经济性能。该研究具有广阔的应用前景。
关键词: 纯电动汽车; 传动比匹配; DOE分析; 多目标优化
中图分类号: U469.72; TM921.41 文献标识码: A
收稿日期: 2019-06-20; 修回日期: 2019-11-27
基金项目: 山东省自主创新及成果转化专项(40215020073);山东省科技发展计划项目(2014GGX103044);青岛市战略性新兴产业培育计划项目(14-8-1-2-gx)
作者简介: 王聪聪(1995-),女,硕士研究生,主要研究方向为电液混合动力汽车动力系统匹配及控制策略。
通信作者: 赵清海(1985-),男,山东人,讲师,博士,主要研究方向为新型动力集成及储能系统设计。Email: zqhbit@163.com
由于石油资源短缺、环境污染等问题日益凸显,电动汽车作为机械和电气耦合的复杂机电系统[1],在节能环保方面具有传统汽车无法比拟的优势[2],但是续航里程短和充电时间长制约了电动汽车的发展。因此,要解决电动汽车的瓶颈问题,对传动比进行合理的参数匹配显得至关重要[3]。理想的驱动场可以在没有变速箱的情况下进行车辆驱动,所以若运用到电动汽车上,在不使用变速器的情况下,可以利用电机的驱动特性来驱动汽车[4],如果增加变速器,会根据行驶情况改变传动比,不同的传动比可以增大电机最大功率和最大效率区间,这样更容易达到各项指标要求。近年来,采用较为先进的遗传算法对设计变量进行多目标优化成为一种趋势。詹樟松等人[5]对汽车动力传动系统优化设计和匹配进行研究;岳惊涛等人[6]对汽车传动系统的合理匹配进行评价。基于此,本文以某款电动汽车为例,利用Isight集成Cruise软件,并采用遗传算法对传动系参数进行多目标优化。该研究满足设计要求,且可以用该算法解决类似多目标优化问题。该研究对节能环保具有重要意义。
1 纯电动汽车动力传动系统
1.1 动力传动系统基本结构
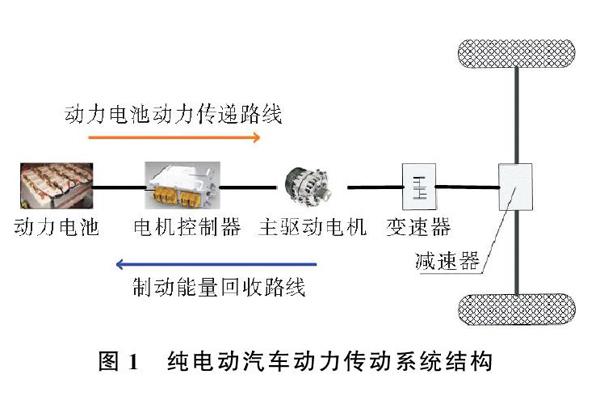
纯电动汽车动力传动系统结构图如图1所示。其中,动力传动系统包括动力电池组、电机控制器,主驱动电机,变速器和减速器等。
1.2 纯电动汽车各项指标要求
纯电动汽车的各项指标要求如表1所示。
2 传动比参数匹配
当动力电池和电机确定后,变速器传动比的选择应首先满足汽车动力性要求,同时还要满足地面附着条件[7]。
1) 电機的最高转速通常会比汽车最高稳定车速所对应的转速高,根据这个关系确定传动系统在二档时的传动比上限为
i0i2≤0.377nmaxrumax(1)
式中,i0为主减速器的传动比;i2为汽车二档传动比;nmax为电机最高转速;μmax为汽车的最高稳定转速;r为汽车车轮半径。
x
2) 电机在额定工况下的最大输出扭矩通常出现在汽车起步阶段,最高稳定车速所对应的行驶阻力产生的阻力矩通常会小于最大输出扭矩,根据这个关系确定传动系统在二档时的传动比下限为
i0i2≥FμmaxrηTTμmax(2)
式中,Tμmax为电机在额定工况下的最大输出扭矩;Fμmax为最高稳定车速所对应的行驶阻力;ηT为传动效率。
3) 最大驱动力通常在一档时产生,最大驱动力应小于或等于地面对车辆轮胎的附着力,根据这个关系确定一档传动比的上限[8]为
i0i1≤FzφrTmaxηT(3)
式中,Fz为地面对驱动轮的法向反作用力;ψ为附着系数;Tmax为电机的最大输出转矩。
4) 电机的最大输出转矩应该大于和最大爬坡角对应的行驶阻力产生的阻力矩,否则不能满足爬坡度动力需求,可根据此关系确定一档时传动比的下限[9-10]为
i0i1≥FαmaxrηTTmax(4)
式中,Fαmax为最大爬坡角对应的行驶阻力;Tmax为电机最大输出转矩。
5) 传统汽车因为离合器的存在,响应速度慢,通常还需要考虑换档期间平顺问题,因此会将两档传动比的比值设置在1.8左右,由于电动汽车没有离合器,电机可以直接参与换档,电机快速响应可以对两档间传动比的比值进行特定设置[11],但是考虑到主减速器在安装过程中防止与其它零件发生干扰,需要设置主减速器的传动比,传动比的上限为[12]
i0-5.8≤0(5)
3 傳动比DOE与多目标分析
3.1 纯电动汽车建模
AVLCruise软件用于车辆动力性和燃油经济性的仿真,其模块化的建模可以使设计者根据不同要求搭建不同布置结构的车辆模型,驾驶员模块的加入可以较好地模拟真实行驶路况,比其它后向仿真软件更贴近实际,复杂精确的求解器可以保障计算速度和结果的准确性[13]。在Cruise中建立纯电动汽车模型,纯电动汽车整车仿真模型如图2所示。
循环工况选用新标欧洲循环测试(new european driving cycle,NEDC)工况,NEDC工况包括市区工况和市郊工况,市区工况由4个小的市区运转循环单元组成,每个循环时间为195 s,包括怠速、启动、加速以及减速等几个阶段,最高车速为50 km/h,平均车速为18.35 km/h,最大加速度为1.042 m/s2,平均加速度为0.599 m/s2;市郊运转循环时间为400 s,最高车速为120 km/h,平均车速为62 km/h,最大加速度为0.833 m/s2,平均加速度为0.354 m/s2,NEDC循环工况如图3所示。
3.2 传动比DOE
为找出对整车能量消耗影响较大的参数,对整车模型参数进行实验设计(design of experiments,DOE)分析。整车模型导出参数如表2所示。
DOE是isight软件中一个模块,不需要手工制作表格和处理数据,适用于产品开发和过程优化,可以使关键的产品特性达到最大或最优,通过科学合理的安排实验,识别产品系统中最为关键的因素,或影响大小及因素间可能存在的交互作用,其结果可以提高产品开发的质量水平和过程优化水平。
当纯电动汽车动力系统其它部件确定后,传动比的大小影响汽车的经济性和动力性,一组合适的速比对电动汽车至关重要。通过式(1)~式(5),可以得出一档速比、二档速比和主减速器速比的上、下限,利用isight软件集成Cruise可以对传动比进行实验设计,采用拉丁超立方法设计样本点,设置完后进行分析,得传动比DOE分析结果,经济性影响因素如图4所示,动力性影响因素如图5所示。图中,蓝色条形表示该项对应的影响是积极的,而红色条形表示该项对应的影响是消极的。
由图4可以看出,一档传动比和主减速器传动比为主要影响因素,其它因素对百公里电耗影响不大;由图5可以看出,主要影响因素为主减速器速比和它的平方,即减速器速比是影响动力性的主要因素,其它因素对动力性影响较小。
3.3 纯电动汽车传动比多目标优化
3.3.1 建立目标函数
多目标函数通常表示多个目标集合在一起的函数,通常是这几个目标函数存在一定的联系,它们各自的优化目标不统一,比如生产商品,既要使产量高,又要使产品质量高、成本低。通常情况下,产品质量高对应的是成本高,这里的目标函数是质量高且成本低,要同时实现这两个目标很难,因此会选择一个折中解,使两个目标函数相对最优来满足整体最优。
本文研究纯电动汽车百公里加速时间和电能消耗问题,也是个多目标函数问题,通常希望用最少的能量消耗来实现车辆动力性能最好,其多目标函数为
minFX=[FecX,Ft(X)](6)
式中,X为优化设计变量,X=[i0,i1,i2]T;F(X)为描述设计目标的多目标函数;Fec(X)为电能消耗的单目标函数;Ft(X)为百公里加速时间的单目标函数。
3.3.2 设置约束条件
多目标函数需要设置约束条件,如果没有约束条件,得出的优化结果片面性较大,车辆动力性有三大评价指标,其中一个指标作为单目标函数,剩下的两个指标可以作为约束条件,因此,将满足设计指标要求的最大爬坡度和最高车速设为约束条件。最大爬坡度约束为
Fi(i0,i1,i2)≥25%(7)
最高车速约束为
Fv(i0,i1,i2)≥130(8)
3.3.3 基于Isight的传动比优化
利用Isight集成Cruise软件,对目标函数进行多目标优化,采用多岛遗传算法,这是借助生物进化中“适者生存”的规律,模仿生物进化中的遗传繁殖机制,是目前解决多目标优化问题常用的方法[14-15],优化过程中各变量迭代过程如图6所示,共有20个岛,20代繁殖,4 000次迭代。
4 纯电动汽车前后仿真分析
优化前后驱动电机转矩变化曲线如图7所示。由图7可以看出,优化后的驱动电机转矩相对优化之前相对降低了一些,不过也处于合理区间之内,这样既可以减少能量的浪费,又可以满足工况的需要;优化前后能量消耗变化曲线如图8所示。
由图8可以看出,优化后的能量消耗与优化前相比较略有下降,根据DOE分析结果可以得出,优化后一档的传动比较优化前的传动比减小,主减速器传动比也减小,这两项是DOE分析中对能量消耗影响最大的两个因素[16]。
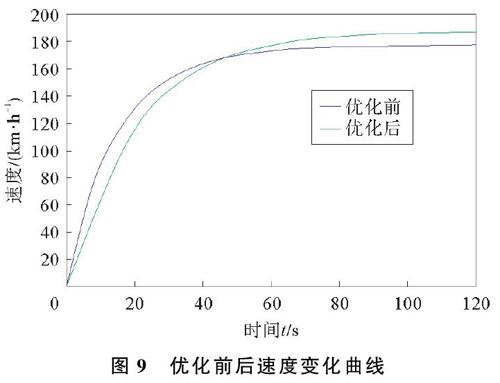
优化前后速度变化曲线如图9所示。由图9可以看出,优化后的加速度较优化前减小,根据DOE分析结果,影响汽车加速性能的主要因素为主减速器速比,优化后的速比较优化前略有减小,因此加速性能有所下降,这与图7所示驱动电机转矩减小基本吻合[17-18],虽然加速性能减小,但是最高车速较优化前略有增加。
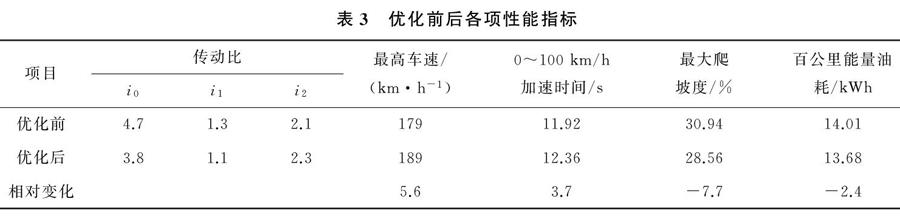
将纯电动汽车优化前后各项性能指标进行对比,优化前后各項性能指标如表3所示。
由表3可以看出,最高车速提升了5.6 km/h,在0~100 km/h时,加速时间增加了3.7 s,最大爬坡度减少了7.7%,但是百公里油耗减少了2.4 kWh。
5 结束语
本文主要对纯电动汽车速比DOE与多目标优化问题进行研究。优化后,电机转矩较优化前减小,但并不影响NEDC工况的转矩需求,可见传动比的改变可以使电机的转矩趋于更加合理的区间,避免了大转矩低需求的能耗浪费现象;优化后,百公里加速时间和最大爬坡度略有下降,但最高车速比优化前略有提高,百公里能量消耗比优化前略有减少,这说明多目标优化并不能使动力性和经济性同时都得到改善,通常是在众多pareto最优解中选取一组综合性能最好的解,此次选取的使动力性能指标和经济性指标变化都在允许范围之内,不影响车辆NEDC工况的要求,所以选取合理。对传动比DOE分析结果与仿真结果基本相符,说明用Isight集成Cruise的方法可行,在进行变量优化之前可以用DOE方法对优化结果做个简单估计,同时可以验证优化结果;采用遗传算法对传动系参数进行多目标优化,结果显示该算法满足设计要求,可以用该算法解决类似多目标优化问题。
参考文献:
[1] 陈清泉, 詹宜君. 21世纪的绿色交通工具-电动汽车[M]. 北京: 清华大学出版社, 2001.
[2] 郭孔辉, 姜辉, 张建伟. 电动汽车传动系统的匹配及优化[J]. 科学技术与工程, 2010, 10(16): 3892-3896.
[3] 薛念文, 高非, 徐兴, 等. 电动汽车动力传动系统参数的匹配设计[J]. 重庆交通大学学报: 自然科学版, 2011, 30(2): 303-307.
[4] Mantled M, Henning W. 汽车动力学[M]. 陈萌三, 余强译. 北京: 清华大学出版社, 2009.
[5] 詹樟松, 杨正军, 刘兴春. 汽车动力传动系统优化设计和匹配研究[J]. 汽车技术, 2007(3): 17-20.
[6] 岳惊涛, 廖苓平, 彭莫. 汽车传动系统的合理匹配评价[J]. 汽车工程, 2004(1): 102-106.
[7] 何洪文. 混合动力车辆驱动系研究和控制策略分析[D]. 北京: 北京理工大学, 2003.
[8] Bradley G, Gregory W, Giorgio R. Operation and control strategries for hybrid electric automobiles[C]∥Future Car Congress. Warrendale, USA: SAE, 2000.
[9] 朱正礼, 殷承良, 张建武. 基于遗传算法的纯电动轿车动力总成参数优化[J]. 上海交通大学学报, 2004, 38(11): 1907-1912.
[10] 文孝霞, 杜子学. 遗传算法在汽车动力性、经济型优化中的应用[J]. 汽车研究与开发, 2002(4): 42-43, 49.
[11] 王立国. 纯电动客车动力总成控制策略研究[D]. 吉林: 吉林大学, 2009.
[12] 廖承林, 张俊智, 卢青青. 混合动力轿车机械式自动变速器换档过程中的动力系统协调控制方法[J]. 机械工程学报, 2005, 41(12): 37-41.
[13] 王少凯. 基于Cruise软件的纯电动城市客车的建模与仿真[J]. 客车技术与研究, 2011, 33(2): 10-12.
[14] 雷英杰, 张善文, 李续武, 等. MATLAB遗传算法工具箱及应用[M]. 西安: 西安电子科技大学出版社, 2005: 62-121.
[15] 秦大同, 周保华, 胡明辉, 等. 两档电动汽车动力传动系统的参数设计[J]. 重庆大学学报, 2011, 34(1): 1-6.
[16] 邹锋. 教学优化算法若干改进及其应用研究[D]. 西安: 西安理工大学, 2014.
[17] 耿建光, 李隆春, 鄧家禔. 设计优化与过程自动化协同优化平台[J]. 航空制造技术, 2004(9): 49-53.
[18] 马静敏. 基于iSIGHT的电子汽车衡的多学科设计优化[D]. 青岛: 山东科技大学, 2005.
DOE Analysis and MultiObjective Optimization of Pure Electric Vehicle
WANG Congconga, ZHANG Hongxina, ZHAO Qinghaib, JIA Tengfeia, HOU Dianpinga
(a. School of Electromechanic Engineering; b. Power Integration and Energy Storage Systems Engineering Technology Center, Qingdao University, Qingdao 266071, China)
Abstract: Due to the unique speed and torque characteristics of pure electric vehicle drive motors, electric vehicle gearboxes do not require too many gears. This article is based on a certain type of electric vehicle that matches the transmission ratio, and performs multiobjective optimization design of the transmission ratio through experimental design(design of experiments, DOE). The optimization results show that the torque of the motor after optimization is smaller than that before optimization. The change of the transmission ratio can make the torque of the motor tend to a more reasonable interval, and avoid energy waste with high torque and low demand. The optimized maximum speed increased by 5.6 km/h, the acceleration time increased by 3.7 s, and the maximum climbing capacity decreased by 7.7%, but the fuel consumption per 100 kilometers decreased by 2.4 kWh. This indicates that the maximum speed ratio has increased, compared with that before optimization, and it reduces energy consumption by 100 kilometers. The above shows that the results are consistent with the expected dynamic indicators, and economic performance is improved. This research has broad application prospects.
Key words: electric vehicles; ratio matching; doe analysis; multiobjective optimization
猜你喜欢
大陆桥视野·下(2016年11期)2017-02-28
建筑科学与工程学报(2016年6期)2017-01-18
数学学习与研究(2016年17期)2017-01-17
青春岁月(2016年22期)2016-12-23
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年21期)2016-10-18
电脑知识与技术(2016年13期)2016-06-29
科教导刊·电子版(2016年10期)2016-06-02
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25