
基于DEVS的交叉路口建模与仿真①
2020-03-18 07:55张学军王兆鹏
计算机系统应用 2020年3期
张学军,王 宁,王兆鹏
(山西大学 电力工程系,太原 030013)
移动互联网技术的发展促使城市交通向着智能化的方向发展,在此过程中,需要深入研究交通系统中各因素之间的关系和相互作用.计算机仿真技术作为分析和研究复杂系统问题的有效工具,必定会在智能交通领域发挥不可替代的作用.
交叉路口是现代城市交通的重要组成部分.应用仿真技术,建立交叉路口仿真模型,通过科学分析,实施有效控制,对缓解交通拥堵问题具有积极意义.文献[1]应用元胞自动机建立了进口道为直左车道和直右车道的交叉路口模型,模型将交叉路口内部分割为若干元胞,各方向车辆通过预先设定的相邻元胞通过交叉路口,路径通常是直线或垂直的折线.但路径的设置对冲突率有较大的影响,可能导致与实际情况不符.此外,文中忽略了右转车辆和行人之间的冲突;文献[2]通过增加元胞的数目提高交叉路口模拟的时空分辨率,期望能精确计算车辆行驶速度;文献[3]提出了一种基于时延的混合Petri 网交叉路口建模方法,模拟了车辆在由交通信号灯控制的双车道交叉路口的行驶行为,但模型层次结构不够明显,计算过程复杂;文献[4]基于支持向量机(SVM)对交叉路口连通状态进行了分类,通过转向关系和转向次数获取物理拓扑路网在交叉路口的连通性.但模型的建立需采集大量的浮动车数据,也不能显式地反映出交叉路口内部的车辆冲突特性.
离散事件系统规范(Discrete Event System Specification,DEVS)是复杂动态系统建模与仿真的一种形式化规范[5],且已被证明与Petri 网、马尔可夫链、元胞自动机等其他离散事件系统模型相比有更强的描述能力[6].使用DEVS 描述交叉路口车辆行驶的动态行为和相互作用更自然灵活.文献[7]基于DEVS 建立了交叉路口模型,使用“转向器”作为运输元件,将待通过交叉路口的车辆看作待转送的货物,当出口具备接收条件时将待通过的车辆从进口转送到出口,但忽略了交叉路口中车辆冲突的复杂性.
本文考虑交叉路口车辆之间、车辆与行人之间的冲突、车辆通过交叉路口时间、路径和交通信号的作用等要素,在DEVS 框架下建立了描述车辆通过交叉路口动态过程的模型,通过仿真试验进行了验证.在余下部分中,第1 部分简单介绍DEVS 模型的组成和结构,重点介绍并行DEVS;第2 部分建立交叉路口微观仿真模型并验证模型的有效性和可靠性;第3 部分提出一种交叉路口智能交通信号控制策略并进行仿真验证;最后给出本文的结论.
1 DEVS 模型
DEVS 是一种系统建模与仿真的形式化规范,包括原子模型和耦合模型.原子模型是具有独立构造、内部活动和输入输出接口的最基本的元素,它用来描述组成系统的基本实体的动态行为.原子模型相互连接形成耦合模型.耦合模型又可与其它原子或耦合连接形成更大具有模块化、层次化结构的系统模型.这一特点使得DEVS 特别适合于面向对象建模与仿真.
并行DEVS 与经典DEVS 相比取消了对顺序处理的限制,同时将输入、输出事件进行打包,使系统能够并行执行[8,9].并行原子模型定义为一个八元组:

其中,X、Y分别是输入、输出事件集;S是状态集;ta(s)是 时间推进函数,它返回状态在s(∈S)停留的最长时间;δint(s)是内部转换函数,描述系统在状态s的停留时间达到ta(s)后 系统状态的演化;δext(s,e,x)是外部转换函数,描述在外部事件x(∈X)的激励下,系统状态的演化,0 ≤e≤ta(s)是 在状态s上已持续的时间;δcon(s,x)是混合转换函数,描述在内部转换和外部部转换同时发生时系统状态的演化;λ(s)是输出函数,描述当状态因内部转换发生变化时系统产生的输出,y=λ(s),y∈Y.
2 交叉路口微观仿真模型
2.1 交叉路口系统分析
图1 为交叉路口示意图.WI、EI、NI 和SI 分别为西向东、东向西、北向南和南向北4 个方向的入站路段,EO、WO、SO 和NO 为4 个方向的出站路段.将入站路段分为左转、直行和右转3 个车道,到达的车辆按转向分别进入不同的车道;在交叉路口内画出不同转向车辆的行驶轨迹,这些轨迹的交点称为冲突点.每个冲突点有2 个进入方向和2 个离开方向.车辆在依次通过其行驶轨迹上的冲突点时,如果冲突点处有车辆,则必须等待直至冲突点中的车辆离开.例如:WI-1 车道中的左转车辆可分别与NI-2 中的直行车辆、SI-1 中的左转车辆、NI-1 中的左转车辆及EI-2 中的直行车辆在11、7、5 及3 点发生冲突.交叉口内发生的冲突,增加了交叉口通行的复杂性,成为影响交通通行能力的主要因素.交通控制器(TC)通过灯光信号只允许部分转向车辆进入交叉口,能有效地减少冲突的次数,提高交通效率,是平面交通控制的主要设施.
2.2 交叉路口的DEVS 建模
车辆通过交叉口的过程可用信息通信系统来比拟,车辆被看作待传输的信息.应用DEVS 建模思想,可以建立4 种原子模型来模拟与交叉口通行仿真相关要素及关系,包括:模拟转向车道的发送器、模拟出站路段的接收器、模拟交通信号的时间信号发生器和模拟冲突点的交换器.
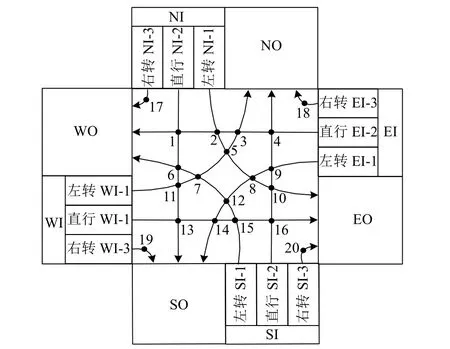
图1 交叉路口示意图
转向车道被建模为信息发送器.当车道内有待通行的车辆时,发送器根据交通信号和连接的冲突点状态发送车辆信息.发送的车辆是否被成功接收,还取决于发送器是否接收到目标冲突点发送的确认接收信息;出站路段被建模为信息接收器,它无条件地接收冲突点发送来的车辆;交通信号是时间信号发生器,它按给定的绿信比和信号周期输出红、绿灯信号;冲突是交叉口通行的主要特征,限于篇幅,本文只详细介绍冲突点Atomic 模型.
冲突点可用容量为1 的通信交换器来模拟,它的原子模型如图2 所示.

图2 冲突点模型
图2 中,5 个输入端口组成交换器的输入端口集:

式中,Recv1和Recv2分别用来接收2 个进入方向发送来的车辆;Perm1和Perm2分别用来接收2 个离开方向发送来的允许/禁止输出信息;Ackin用来接收2 个离开方向发送的车辆被接收的确认信息.
4 个输出端口组成交换器的输出端口集:

式中,Send1和Send2分别用来向2 个离开方向输出车辆;Load发送允许/禁止向冲突点输出车辆的信息;Ackout发送车辆被接收的确认信息.
为了描述冲突点交换器的动态行为,首先定义事件集和状态集.输入事件集定义为:

输出事件集定义为:

式中,p为事件的端口;v为事件的值;Xin=V和Yout=V分别为输入和输出事件的值集,V的元素是车辆序号或布尔量.
冲突点交换器状态集定义为:

状态集的元素:

式中,ph∈{Passive,Resp,Delay}为 过程标识,Passive表示交换器内无车辆,等待车辆输入;Resp表示收到新的输入,将作出响应;Delay表 示有车辆待输出;σ ∈是状态的寿命,即是在无外部事件发生的情况下在状态s停留的最长时间;v∈Z是待输出车辆的序号,v=0表示无车辆;port∈{Recv1,Recv2} 是车辆v的输入端口;sw1 ∈{true,false}和sw2 ∈{true,false}分别表示允许/禁止经端口Send1和Send2输出车辆.
冲突点交换器外部转换函数、内部转换函数和混合转换函数描述了冲突点交换器的动态行为.分别如下定义,式(8)分5 种情况给出了在外部事件发生时冲突点交换器状态的变化;式(9)分3 种情况给出了冲突点交换器在状态寿命自然结束(被称为内部事件)时状态的变化;式(10)表当示内外部事件同时发生时,先执行外部事件转换再执行内部事件转换;式(11)分5 种情况给出了内部转换发生前的输出事件,包括输出端口和事件值;式(12)表示事件推进函数仅简单地返回当前状态的寿命,仿真程序据此确定下一最早事件的发生时间.

式中,x.v和x.port分别为事件x的值和端口.

式中,pass_t为车辆通过冲突点需耗费的时间.

输出函数和时间推进函数如下定义:

2.3 模型验证
为了验证模型,选择某市城区一典型交叉路口进行观察统计,用统计数据设置仿真参数,将仿真试验结果与根据《城市道路设置规范》计算结果进行了比较.
2.3.1 基础数据调查
该交叉路口包含4 个进口道,每个进口道包含3 条车道,分别为直行、左转、右转专用车道,由于交叉路口车辆95%以上为小型汽车,忽略中型和大型车辆.调查结果显示,车辆到达率服从指数分布.交叉路口相位如图3 所示,其中,右转车辆不受信号灯控制,左转与直行车辆受同一信号灯控制.信号灯周期为125 s,其中第一相位为59 s,第二相位为66 s(含黄灯时间3 s).绿灯亮后第一辆车启动通过停止线的平均时间为2.0 s,之后车辆通过停止线的平均车头时距为2.5 s.对同相位两个方向车辆转向比例取平均值,两个相位不同转向行驶车辆的比例为:第一相位车辆左转比例为27%,直行比例为52%;第二相位车辆左转比例为19%,直行比例为65%.车辆直行通过交叉路口的平均时间为6.2 s,左转通过交叉路口的平均时间为10.38 s,右转车辆不受交通信号控制,但右转车辆受行人影响较大,所以对一个周期内右转车辆通过交叉路口的时间取平均值,约为6.0 s.

图3 交叉路口相位图
2.3.2 通行能力计算
《城市道路设计规范》[10]指出,交叉路口的通行能力等于各进口道通行能力之和,各进口道的通行能力等于各车道通行能力之和.本例交叉路口入站车道为左转、直行和右转专用,采用以下3 种车道的通行能力计算方法,表1 为各相位各进口道通行能力的计算结果.

表1 各进口道车辆通行能力
1)直行车道的通行能力计算公式:

其中,Cs是 1 条直行车道的通行能力,veh/h;Tc是信号灯周期,s;tg是绿灯时间,s;t0为绿灯亮后,第一辆车辆启动通过停止线的时间,s;ti为车辆通过停止线的平均车头时距,s;φ为折减系数,一般为0.9.

其中,Celr为进口道通行能力之和为本进口道直行车道通行能力之和;βl、 βr分别为左、右转车占本面进口道车辆的比例.
2)左转专用车道的通行能力计算公式:

3)由于右转车不受信号灯控制,右转专用车道的通行能力为两个相位车道通行能力之和,计算公式:

其中,为另一相位进口道通行能力之和.
计算得到交叉路口通行能力为5233.834 veh/h.
2.3.3 通行能力仿真
根据实地统计数据标定模型参数,通行能力仿真结果如图4 所示.仿真结果显示,单位时间内通过交叉路口的车流量随到达率的增加逐渐上升直至稳定,该稳定流量即为交叉路口的通行能力.文献[10]中根据 《城市道路设计规范》计算得到的设计通行能力比实测结果高10.4%,而本文通过仿真得到交叉路口的通行能力为4620 veh/h,与计算得到的通行能力相对误差为13.286%,说明交通仿真的结果与实际结果相近,证明模型的可靠性.
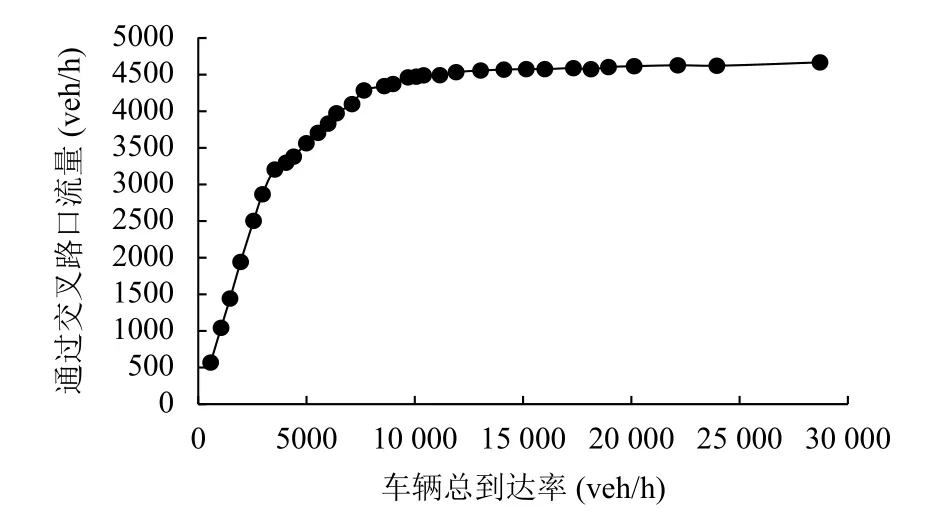
图4 通过交叉路口流量与车辆总到达率的关系
不同转向比例直接影响交叉路口的通行能力.假设总车流到达率平均为6000 veh/h(大于通行能力),右转车辆不受信号灯控制且右转车比例为0.1.通过增加左转车辆的比例,同时降低直行车辆的比例,监测左转比例对交叉路口通行能力的影响,仿真结果如图5 所示.
交叉路口通行能力先随着左转车比例的增加而增大,这是由于左转与直行同信号,绿灯时可同时通过两辆车,因此通行能力增加;当左转比例为0.2 时,交叉路口的通行能力达到最大;继续增大左转车比例时,通行能力下降,这是由于各方向左转车辆与对向直行车辆冲突加强,通过交叉路口的时间比直行车辆要长,从而导致通行能力下降.

图5 左转比例对交叉路口通行能力的影响
3 智能交通仿真设计
当前,交通拥堵问题日益严重,固定时长的交通控制信号已经不能满足当前的需求.城市智能交通管控系统[11]作为解决交通拥堵问题的重要手段,能够提高交叉路口的运行效率,提高行车安全进而推动经济的发展.文献[12]根据各相位关键车道的流量,采用遗传算法和自适应遗传算法优化了车辆平均延误时间并制定了绿信比;文献[13]建立了基于门限服务策略的交通信号灯轮询控制模型,根据交叉路口车辆平均排队长度,利用马尔科夫链和概率母函数对多个交叉路口进行信号灯时长分配;文献[14]将东西和南北两个方向的车流量比值设定为多个状态,对各种状态制定了相应的绿信比.这些文献提及到基于车流量的监测优化信号灯运行系统[15,16]均可以改善交叉路口的通行能力以及减少车辆的延误时间,但是都不够精确和实时.本文考虑当一个信号灯周期结束时,通过监测各个路段等待区内等待车辆的数目对下一周期内各信号灯时间进行实时分配,能够有效减少车辆堆积.通过控制交叉路口信号灯周期不变,将系统各相位的绿信比由两个相位等待区内最大车辆数的比值作为分配依据,如式(18)所示.

其中,we、ns分别为东西、南北方向等待区内存在的最 大 车 辆 数 目;wl、wt、el、et、nl、nt、sl、st分 别为西向东左转、西向东直行、东向西左转、东向西直行、北向南左转、北向南直行、南向北左转、南向北直行等待区内车辆数目;Tg1、Tg2分别为东西、南北方向绿灯信号时长;T为交通信号灯周期;η为绿灯最短时长,考虑左转车通过交叉路口的平均时间为10.38 s,设置η =10.38 s.
为验证该模型的优越性,假设总车流到达率平均为6800 veh/h(大于通行能力),且同相位下的车辆到达各进口道的比率相同.将该策略与典型的固定时间控制策略进行比较,分析东西和南北两个方向车辆到达率不同的情况下交叉路口的通行能力,仿真结果如图6所示.
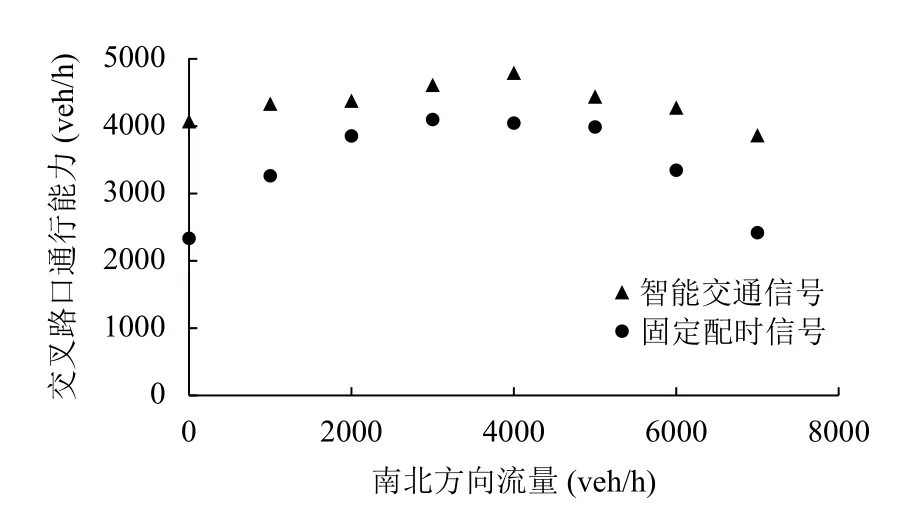
图6 智能交通与固定配时通行能力对比图
两个相位车流到达率差值越大,在智能交通信号下的交叉路口通行能力越优于固定配时信号.交叉路口在南北方向车流到达率为0 的情况下,智能交通下的通行能力比固定配时下的通行能力高74.5%.当两个方向车流均匀到达时,智能交通下通行能力也比固定配时下通行能力高12.5%,动态调整各信号灯的运行时间,能够有效解决单车道流量过大的情况,科学疏导交叉路口的车流.
引道延误时间是指车辆第一次停车到越过停止线的时间,本文基于引道延误时间分析智能交通信号的优越性.假设东西方向车流到达率大约为4800 veh/h,南北方向车流到达率为1800 veh/h,图7 所示为28 个周期下每个周期内通过所有车辆的平均引道延误时间,可以看出,在智能交通信号下平均引道延误时间均小于固定配时信号.
在智能交通信号的控制下,交叉路口的通行能力显著提升,车辆的平均等待时间明显减少.智能交通信号极大地缓解了城市的交通拥堵问题,节约了用户出行时间并减少了车辆等待期间产生的尾气污染.

图7 智能交通与固定配时延误时间对比图
4 结论
本研究建立了基于DEVS 的由信号控制和双向3 车道组成的交叉路口微观仿真模型.该模型能准确描述交叉路口间车辆的有序以及冲突特性,强化了交叉路口各部分交通状态并提高了仿真的真实性和准确性.通过仿真得到了车流到达率与交叉路口流量的关系,探究了左转比例对通行能力的影响,显示其仿真结果与计算结果误差为13.286%,验证了模型可靠;得到了通行能力随着左转车的比例的增加先上升后下降的结论,可以看出最优左转车比例大约为20%.
在此基础上,改进了受固定配时信号控制的交叉路口,即由路口停止线内等待的车辆数来决定该路口下一周期信号灯的绿信比,进而对信号灯进行智能控制.结果显示智能交通信号灯极大地增加了交叉路口的通行能力并减少了用户的平均等待时间.仿真结果表明所建立的基于DEVS 的交叉路口模型具有灵活性且适应性强,可用于其他交通问题的研究.
猜你喜欢
重庆交通大学学报(自然科学版)(2022年6期)2022-06-24
西华大学学报(自然科学版)(2021年4期)2021-07-14
小天使·四年级语数英综合(2021年3期)2021-05-10
价值工程(2019年18期)2019-07-25
世界家苑(2018年6期)2018-07-23
小天使·一年级语数英综合(2018年6期)2018-06-22
中国房地产业·上旬(2018年3期)2018-05-14
建筑建材装饰(2016年22期)2017-08-14
华人时刊(2016年19期)2016-04-05
小学阅读指南·低年级版(2014年5期)2014-09-15
