
基于智能技术的电气自动化控制系统分析
2020-03-27 06:47王汉斌
通信电源技术 2020年22期
王汉斌
(广东省技师学院,广东 惠州 516100)
0 引 言
电力产业是社会运行与生产的重要动力支撑,随着智能技术的发展优化,电力产业相关领域技术得到了大幅度提升,电气设备的自动控制与管理越来越普及[1]。智能技术是千百种智能算法与高科技硬件系统、现代通信技术以及计算机系统等充分结合的产物,使用计算机等复杂的程序代替海量人脑工作,技术人员在计算机前端即可查看并掌控整个电气自动化系统的运行状态[2]。无论是变电站还是建筑工程的生产与运行,都可以通过智能技术进行精准全面的信息采集与分析,从而达到高效率管理电气工程的目的[3]。本文基于智能技术设计了高性能的电气自动化控制系统,重点论述了电气自动化系统故障检测与模糊控制功能模块设计情况,为现代电气自动化提供新的技术优化途径。
1 基于智能技术的电气自动化控制系统设计
1.1 系统总体架构设计
图1为基于智能技术设计的电气自动化控制系统总体架构,各部分之间采用网络进行信息通信,采用集中与分散控制策略,系统总体设计了中央监控中心全方位采集电气自动化系统的相关数据,以网络为载体向远程监控中心和主控制器等部分传递信息。系统功能模块以中央控制中心传递的现场数据为基础,以各种智能算法为工具进行数据分析,实现电气自动化控制系统的多种智能化功能[4,5]。
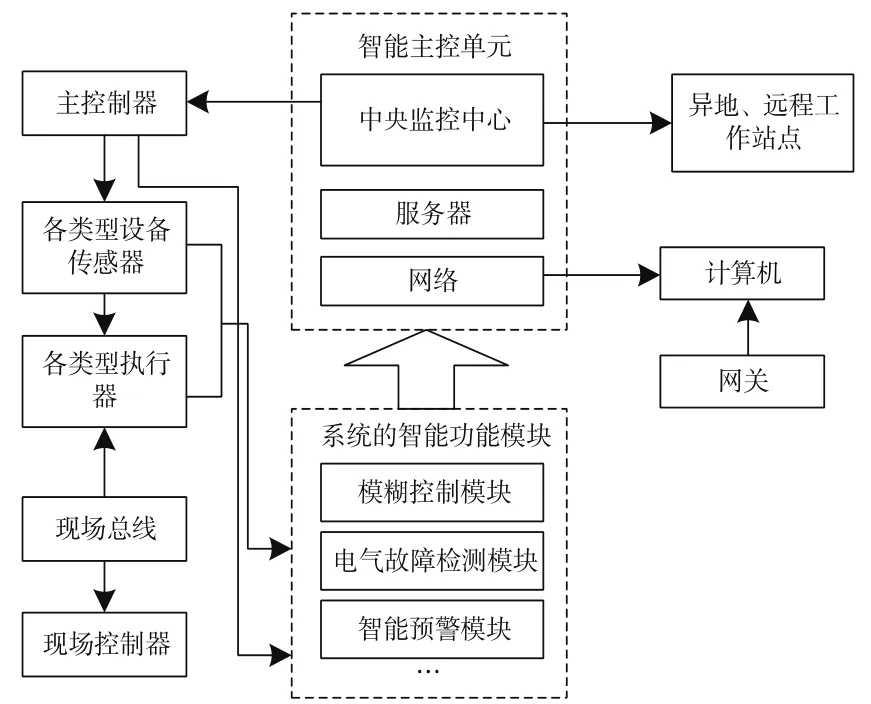
图1 基于智能技术的电气自动化控制系统总体架构
1.2 系统功能模块设计
1.2.1 智能监控模块
智能监控功能是本系统设计的关键功能之一,实现了电气设备运行数据的全方位采集,包括文本数据、图像数据以及视频影像数据等,是系统各项软硬件功能实现的基础。本系统智能监控模块的主要功能如图2所示。
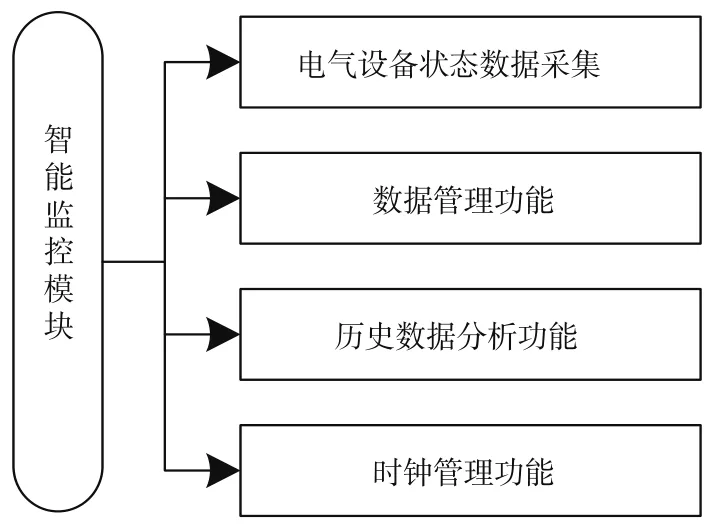
图2 智能监控模块的主要功能
数据采集是智能监控模块的根本任务,通过在电气设备布置各类型传感器节点,充分搜集变压器气体数据、温度数据以及电机振动数据作为故障检测和设备使用状态评估的基础,并进行统一的数据管理。数据管理功能则包括数据清洗和格式转换等基本预处理方式,降低原始噪声数据对分析结果的干扰[6]。历史数据分析为用户提供了阶段性数据查询功能,用户可以按照时间、类型以及名称等分类方式查询电气设备的历史运行数据。时钟管理功能使整个系统按照预期设置的运行方案执行,根据定时器设置情况各种功能模块执行相应的暂停、开始以及终止等命令。
1.2.2 电气故障检测模块
系统自动采集电气自动化设备原始运行数据作为故障智能检测的基础,该系统基于BP神经网络设计了故障检测模型,利用误差反向传播算法生成多层次的前向神经网络结构,以原始运行数据为样本进行学习,最终检测出当前电气自动化设备是否存在故障,节省人工巡查设备故障的工作时间[7]。此处构建的BP神经网络电气故障自动检测网络结构见图3,包括3个输入层节点、10个隐含层节点以及4个输出层节点。
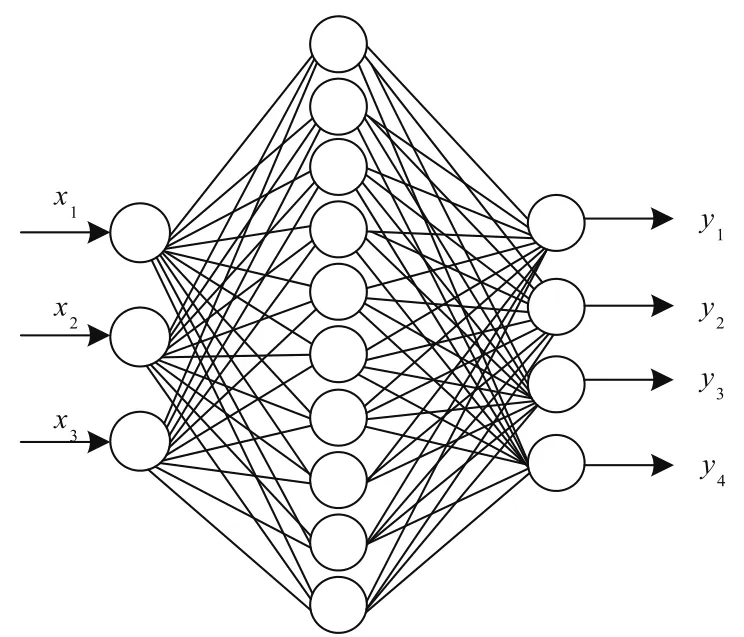
图3 BP神经网络电气故障自动检测网络结构
本系统智能之处在于可以自使用检测出电气自动化设备的故障信息,所以在构建BP神经网络模型过程中增加了可信度概念,采用特定的判断规则评估当前系统是否发生故障,约束故障检测的精度。该算法训练样本同样为设备采样节点中获得的原始运行数据,定义λ表示网络结构的可信度,第i个输出向量为Ti′,且有Ti′={rij′},j=1,2,…,q,q为总输出向量,求取可信度的方法如下:


此处根据可信度设定电气故障检测规则的原理如下,为可信度定义一个阈值δ,判断网络输出结果是否在该阈值范围内,断定输出结果是否为该故障状态。利用可信度阈值可实现自适应判断电气故障,无需人工参与训练,增加了电气自动化系统控制的智能化水平[8]。
1.2.3 模糊控制模块
模糊逻辑控制是电气自动化领域使用频率高、性能优越且好评度高的智能控制技术,一般简称模糊控制。模糊控制属于非线性控制技术范畴,控制自动化设备运行的关键依据是直流或者交流传动信息,前者信息负责提前阻止设备发生故障,后者信息可完成对电气自动化系统的智能化控制。
输入量模糊化、模糊推理以及输出量精确化是模糊控制实现对电气自动化设备控制的主要步骤,本系统为提高模糊控制在电气自动化控制中的精度使用粒子群优化算法对其进行优化设计[9]。电气自动化设备直流电机的转速偏差和偏差变化量是模糊控制器的两个关键输入变量,分别用h和l表示,同时定义两者的量化因子为gh和gl,α表示模糊控制器的输出变量,对应的比例因子用gα表示。上述定义中存在3个模糊量H、L以及α,采用式(3)和(4)可求取模糊控制器的输入量:

对电气自动化控制系统的调节控制需要得到模糊控制器的精准输出量。自动化控制系统使用PID控制器技术进行自动化控制,求取PID控制系统的精确控制输出量,其计算方式是求取模糊变量与比例因子的乘积,方法如下:
一般性 PID 参数分别采用 Δg′p、Δg′i以及 Δg′d表示,即模糊推理处理后的变量,变量对应的比例因子为Gα1、Gα2、Gα3,校正量分别为 Δgp、Δgi、Δgd。
参照张继荣等人基于粒子群算法对PID参数的优化方法,改进电气自动化模糊控制器性能[10]。粒子群算法可动态自适应修正模糊控制器的参数,改进后的模糊控制器的权重可以自适应修正,以此方式在初始阶段精准控制模糊控制器的输入变量,以提高输出量的精准度。
2 实验与分析
为验证本文设计的电气自动化智能控制系统的控制性能,以某工厂的电气控制系统为对象进行智能改造实验。本文设计的电气自动化控制系统具备设备状态智能监控、设备图像自动采集、故障自动检测、自适应模糊控制以及自动预警等多项功能,为突出本文系统进行电气自动化控制的优势,使用传统PID自动化控制系统和基于图像识别的自动化控制系统进行对比测试,以分析各系统性能的优劣。
2.1 系统故障检测实验
实验过程中人为设置设备故障,总计进行6次故障测试,N1、N2、N3、N4、N5分别表示实验中为系统预设的故障类型。由本文系统、传统PID自动化控制系统以及基于图像识别的自动化控制系统分别进行故障检测,统计各系统故障检测结果与故障预警响应时长,如表1所示。
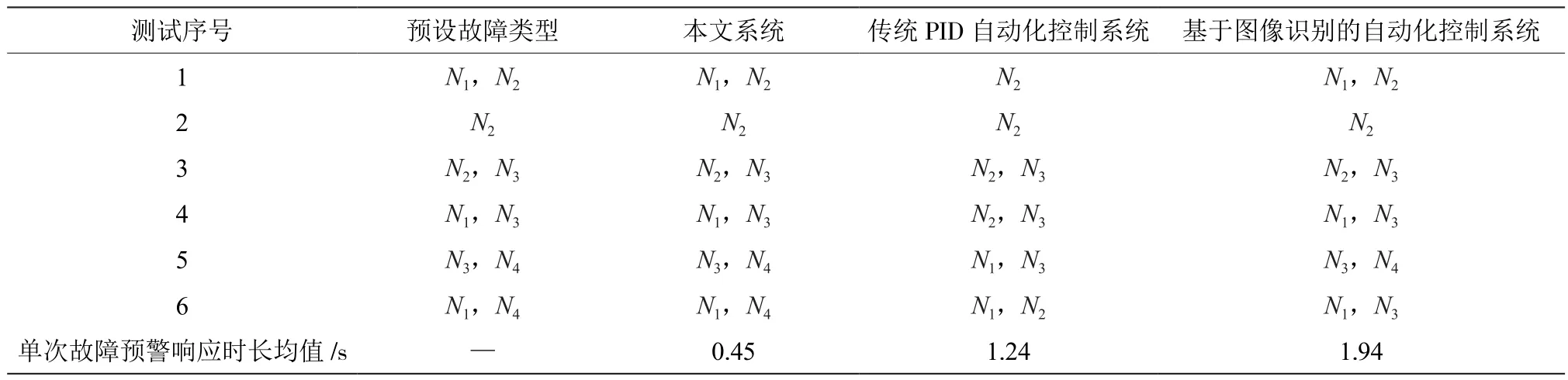
表1 3种系统的故障检测效果及预警响应时长统计
表1数据显示,6次故障检测测试中人为设置的故障类型有所差别,本文系统能够根据采集的设备原始状态数据精准识别出当前电气设备故障类型,与预设类型完全一致,故障检测率达到100%,并且在故障发生0.45 s后本文系统便做出预警指示,通知值班人员进行设备维修,减少了设备延迟修理带来的风险。相比之下,传统PID自动化控制系统只有第2次和第3次故障检测类型与实际相符,其他4次均存在判断误差,基于图像识别的自动化控制系统前5次故障检测结果与实际一致,检测率可达83.3%,效果较为理想,但是该系统故障检测后的预警响应可达1.94 s,相比本文系统而言存在较大的延迟性。
2.2 系统模糊控制性能实验
测试系统模糊控制性能过程中,为电气自动化设备添加15%的负荷干扰,利用3种系统对电气设备进行自动化控制,设备电机输出频率如图4所示。
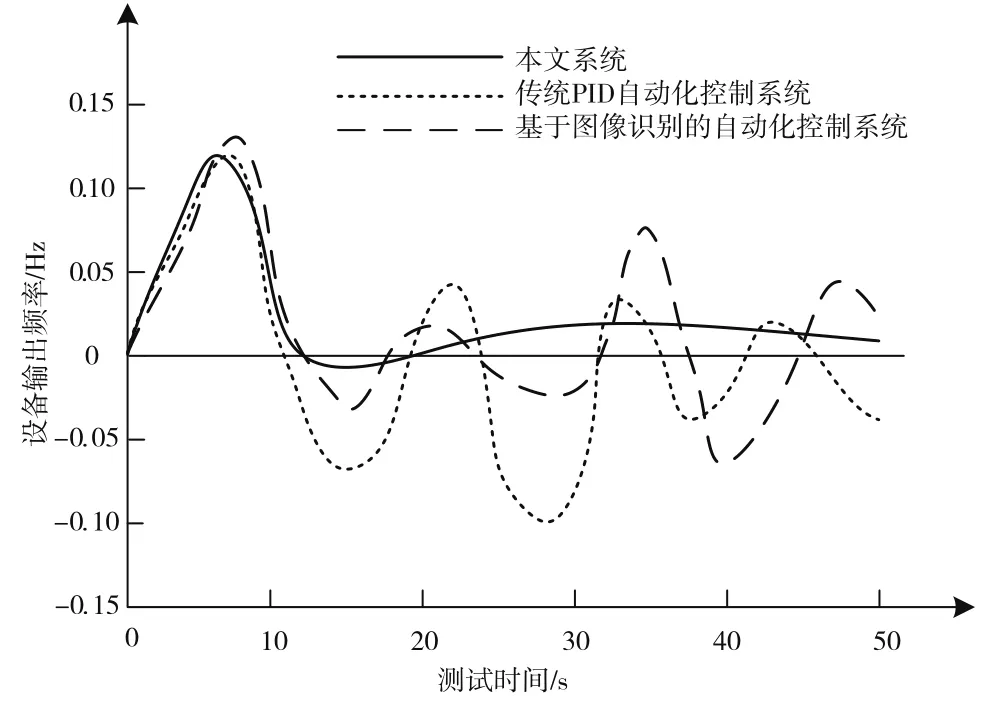
图4 3种系统控制下的电气设备电机输出频率
3种设备输出频率曲线表明,0~10 s内3种系统控制的输出频率均不平稳,这是因为实验初期电气设备增加15%负荷干扰后产生极大的波动。随着3种系统发挥调节控制作用,电气设备输出频率逐渐发生不同程度的变化,本文系统控制后的电气设备输出频率基本不存在大幅度上下波动现象,并且趋于平稳,传统PID自动化控制系统控制效果不太理想,尤其在实验进行到28.2 s时产生输出频率最大值,约达-0.10 Hz。基于图像识别的自动化控制系统在人为负荷干扰下没有调整好电气自动化系统的运行状态,仍存在大幅度的输出波动情况。实验结果表明,本文系统取得了较优的电气自动化控制效果,优于同类型控制系统。
3 结 论
本文利用智能技术设计了一种高精度和快速响应的电气自动化控制系统,具备智能监控、电气故障自适应检测以自动模糊控制等重要功能,实现了对电气设备的智能化与自动化控制。设计电气故障自适应检测模块时引入BP神经网络智能算法,引入可信度变量判断当前电气设备数据是否存在故障因素。设计自动模糊控制模块时主要运用了模糊逻辑控制算法,利用粒子群优化算法确定PID参数,改进后的模糊控制器权重可以自适应修正,提高了模糊控制器的输入变量值的精准度,进而实现对电气设备的合理控制。在实验环节验证了本文系统的优越性能,为电气设备添加15%负荷干扰的情况下,本文系统仍然在短时间内将电气设备输出频率控制在平稳状态内,对于电气自动化控制应用领域而言,该系统具有一定的实际应用与推广空间。
猜你喜欢
中国自行车(2022年6期)2022-10-29
商品与质量(2021年43期)2022-01-18
建材发展导向(2021年14期)2021-08-23
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年10期)2021-07-16
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
