
新型重点区域无人机防控系统*
2020-05-08 05:54张进薛德鑫王奉甲
现代防御技术 2020年1期
张进,薛德鑫,王奉甲
(1.江苏自动化研究所,江苏 连云港 222061;2.中国舰船研究院,北京 100101)
0 引言
近年来,重点区域(例如机场、政府场所、重要港口等)频繁出现无人机骚扰袭击事件。2015年1月,美国华盛顿白宫证实,执法部门当天发现一架小型无人机闯入白宫;2016年5月,成都双流机场遭无人机逼停55架航班,对机场造成了重大经济损失。随着低空空域的逐步开放以及商业无人机的日受青睐,重点区域遭受此类“低小慢”目标的威胁将会越来越大[1-2]。因此,构建重点区域无人机防控系统显得尤为必要[3-5]。
目前,现有的无人机防控系统基本分为固定式防控系统[6]以及移动式防控系统[7-8]。固定式防控系统对设备的体积、重量约束比较小,因此系统的功能性能指标一般较高,但是缺乏机动性,只能固定防御某一范围内的“低小慢”目标。而移动式防控系统虽然机动性强,但是由于载体空间有限,需要考虑设备的便携性、安装简易性以及高度集成性,因此系统的功能性能指标一般要低于固定式防控系统。上述2个无人机防控系统的优劣势正好互补,针对此现象,本文构建了一种新型无人机防控系统,将上述2个子系统进行高度有机集成,以此大幅度提升系统的功能和性能,此新型无人机防控系统的构建在国内尚属首例。
1 新型无人机防控系统
目前,主流的无人机防控系统一般由探测识别分系统、指挥控制分系统以及打击火力分系统组成[9-10]。新型无人机防控系统通过将固定式防控系统和移动式防控系统有机融合在一起,其基本组成包含2套探测识别分系统、2套指挥控制分系统以及两套打击火力分系统。
1.1 系统的组成与配置
1.1.1 系统的组成概况
新型重点区域防控系统中的探测识别分系统主要由低空空域监视雷达、低空小目标探测雷达(移动车载系统)、光电识别跟踪设备、光电识别设备(移动车载系统)组成。其中,两型雷达设备是专为探测“低小慢”目标研制而成,两型光电设备主要用于对已经捕捉的目标进行识别确认,判断是否为敌对“低小慢”目标,以免造成误伤。
新型重点区域防控系统中的指挥控制分系统主要由综合控制设备和车载指挥控制设备组成。两型指挥控制设备主要用于接收雷达设备的目标信息,实时解算目标的运动要素,并指挥调度光电对已捕捉的目标进行识别确认,最后控制干扰打击设备对敌对“低小慢”目标进行防控。
新型重点区域防控系统中的干扰或对抗分系统主要由导航通信干扰设备、定向干扰设备(移动车载系统)组成。常见的反无人机技术包括硬毁伤技术、干扰技术以及伪装欺骗技术[11]。其中,干扰技术由于其技术成熟且反制效率高,在反无人机领域被普遍使用。因此,新型无人机防控系统同样采用的是干扰技术。
新型重点区域防控系统的具体设备组成,可以参考表1。

表1 系统组成与配置
1.1.2 系统各设备简介
(1) 低空空域监视雷达
低空空域监视雷达为X波段采用分布式固态收发的近程多功能三坐标雷达,主要由有源天线、信息处理机箱、便携式终端等组成。有源天线主要完成雷达激励信号分布式发射和微弱回波信号的分布式接收、多通道高速数据同步传输、通道幅相精确修正、多波束数字波束形成(digital beamforming,DBF)合成等处理;信息处理机箱完成多通道信号处理和数据处理;便携式终端主要用于完成雷达视频显示、整机操控、状态显示及故障检测。
低空空域监视雷达对于微型无人机(RCS=0.01 m2)最远探测距离能达到10 km,对于大型无人机(RCS=0.1 m2)最远探测距离能达到18 km,其中,RCS(radar-cross section)表示雷达散射截面积。具体设备如图1所示。

图1 低空空域监视雷达
(2) 低空小目标探测雷达
低空小目标探测雷达采用Ku波段,由雷达收发阵面、伺服转台、处理与显示机柜、总电源线缆、单模光纤线缆、架设工装组成。
低空小目标探测雷达对于微型无人机(RCS=0.01 m2)最远探测距离能达到5 km,对于大型无人机(RCS=0.1 m2)最远探测距离能达到8 km。具体设备如图2所示。

图2 低空小目标探测雷达(车载系统)
(3) 光电识别跟踪设备
光电识别跟踪设备由室外光电指向器(前端设备)和室内显控机柜(终端设备)两大部分组成,两者之间用室外电缆或光缆进行连接,其中光电指向器采用地平式两轴转台结构,由电视成像单元、红外成像单元、激光器、伺服控制组件及支撑平台等部分组成。
光电识别跟踪设备在天气良好状况下,对于微型无人机最远识别距离能达到5 km,对于较大型无人机最远探测距离能达到10 km。具体设备如图3所示。

图3 光电识别跟踪设备
(4) 光电识别设备(车载系统)
光电识别设备采用高清可见光摄像机和红外成像仪,借助伺服机构,根据目标指示信息手动或者自动捕获并跟踪无人机目标。光电识别设备在天气良好状况下,对于微型无人机最远识别距离能达到2 km,对于较大型无人机最远探测距离能达到5 km。具体设备如图4所示。

图4 光电跟踪设备(车载系统)
(5) 综合指挥控制设备
综合控制设备主要由配电箱(3U,U为服务器外部厚度尺寸的单位,1U表示4.45 cm)、KVM(1U)、光端机(2U)、GPU服务器(4U)、网络交换机(2U)、重点区域防控软件组成。能够同时接收不小于32批目标信息,并同时生成4类对抗设备的运行参数,并具有自动转火设置功能。具体设备如图5所示。

图5 综合指挥控制设备
(6) 车载指挥控制设备
车载控制设备主要由KVM(1U)、GPU服务器(4U)、网络交换机(2U)、配电箱(3U)等组成,具有信息接收、信息处理、人机交互、信息发送、信息显示等功能。具体设备如图6所示。
(7) 导航通信干扰设备
导航通信干扰设备由多功能二维转台、光学探测设备、多频段无人机干扰设备和计算机控制与图像处理系统组成。干扰频段433 MHz~5.8 GHz,对于小型无人机,干扰最远距离可以达到6 km。具体设备如图7所示。

图7 导航通信干扰设备
(8) 定向干扰设备
定向干扰设备由二维转台、光学探测设备、多频段无人机干扰设备组成。干扰频段900 MHz~5.8 GHz,对于小型无人机,干扰最远距离可以达到5 km。具体设备如图8所示。

图8 定向干扰设备(车载系统)
1.2 系统的组织结构
新型重点区域无人机防控系统采用开放式体系结构,模块化设计,并采用一体化设计技术,基于统一的网络配置和信息交换机制,各设备之间可以进行信息共享,实现了信息集成一体化。其组织结构关系如图9所示。
固定式防控系统和移动式防控系统都可以单独完成对敌方“低小慢”目标的防控任务,两者通过无线网络技术进行信息传输,共同构建新型无人机防控系统。2个子系统之间可以实现探测目标信息共享、操控指令下发及防控效果反馈。系统的指挥控制设备,集目标识别、威胁判断、目标分配、对抗设备控制功能于一体,实现了指挥控制一体化,充分发挥了体系效能。
1.3 系统的功能特点
1.3.1 系统主要功能
(1) 目标探测识别功能
能够实现对“低小慢”目标的探测和跟踪,并通过光电视频信息实现对目标的识别确认。
(2) 综合态势生成功能
指挥控制设备可以实时显示探测系统已经捕捉目标的位置信息,并根据探测设备发送的目标航迹实时解算目标的运动参数,生成实时的综合态势。
(3) 对抗设备综合控制功能
综合控制设备可以实时控制导航通信干扰设备,对敌方“低小慢”目标进行防控,也可以下发操控指令给车载指挥控制设备,实现对定向干扰设备的控制。
1.3.2 系统主要特点
新型无人机防控系统将固定式防控系统和移动式防控系统的优劣势进行互补,因此不仅有效提高了系统的灵活性和机动性,也大幅提升了系统的各项功能和性能。系统的主要特点如下:
(1) 系统中的雷达设备专门针对“低小慢”目标,可以实现多批“低小慢”目标的同时跟踪,且系统中同时具有2部探测雷达,可以起到相互补充、相互验证的作用。
(2) 系统中的指挥控制设备具有自动转火功能,一次性分配多批目指后,可以实现对多批目标的自动干扰打击,提高了作战效能。
(3) 系统可以分别或同时采用固定式防控和移动式防控系统,提高了任务执行时的灵活性、机动性。
1.4 系统的操作运行
新型无人机防控系统开机运行后,由雷达设备进行目标的搜索和捕捉,捕捉到目标以后,指挥控制设备调度光电设备进行目标识别确认并实时生成对抗设备的运行参数,确认为无人机后,指挥控制设备则控制对抗设备进行干扰打击,整个系统运行流程如下图10所示。
2 关键技术
2.1 4G无线网络传输技术
无线网络通讯的方式有多种,新型无人机防控系统采用的是4G无线网络通讯技术[12],通过在固定式防控系统和移动式防控系统两端各添加一个4G无线路由器,并共同连接华为云,在云服务器上进行信息交换,实现固定式防控系统和移动式防控系统的无线通讯功能。
为保障传输过程中的数据的安全性,采用虚拟专用网络(virtual private network,VPN)技术,实现端对端的数据安全加密。4G回传配合监控系统,可以实时将车载反制的实时画面及语音传输给综合指挥控制设备,综合指挥控制设备可以实时观察反制现场情况
2.2 多目标协同打击技术
若新型无人机防控系统在部署时,采用固定式防控系统与移动式防控系统防御区域相互重合的方式(如图11所示),则相当于新型无人机防控系统在防御重合区域内同时拥有两型防控设备(即:导航通信干扰设备和定向干扰设备),对任一敌对“低小慢”目标,可以随意分配目指给两型防控设备,对多批敌对“低小慢”目标,两型防控设备可以进行协同打击,大幅度提升了系统的防控效果。

图9 系统的组织结构

图10 新型无人机防控系统运行流程图
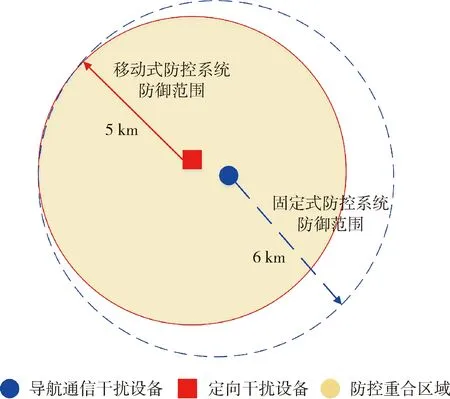
图11 重合式系统部署示意图
尤其在当前无人机蜂群作战越来越受到各国重视的情况下[13-15],上述新型无人机防控系统有效提高了作战效能,在指挥控制设备自动转火的设置下,可以短时间内对多批敌对“低小慢”目标进行干扰打击。
2.3 远程协同干扰技术
若新型无人机防控系统在部署时,采用固定式防控系统与移动式防控系统防御区域相互远离,但都在低空空域监视雷达探测范围内的方式(如图12所示),则综合指挥控制设备可以将探测到的目标信息发送给车载指挥系统,发挥远程协助打击的作用,尤其在低空小目标探测雷达由于其他因素探测不到目标时,远程协助打击技术将起到关键性作用。
此部署方式另一大优势就是扩大了防御范围,固定式防控系统和移动式防控系统可以分别部署在2个重点区域,起到相互协同干扰的效果。
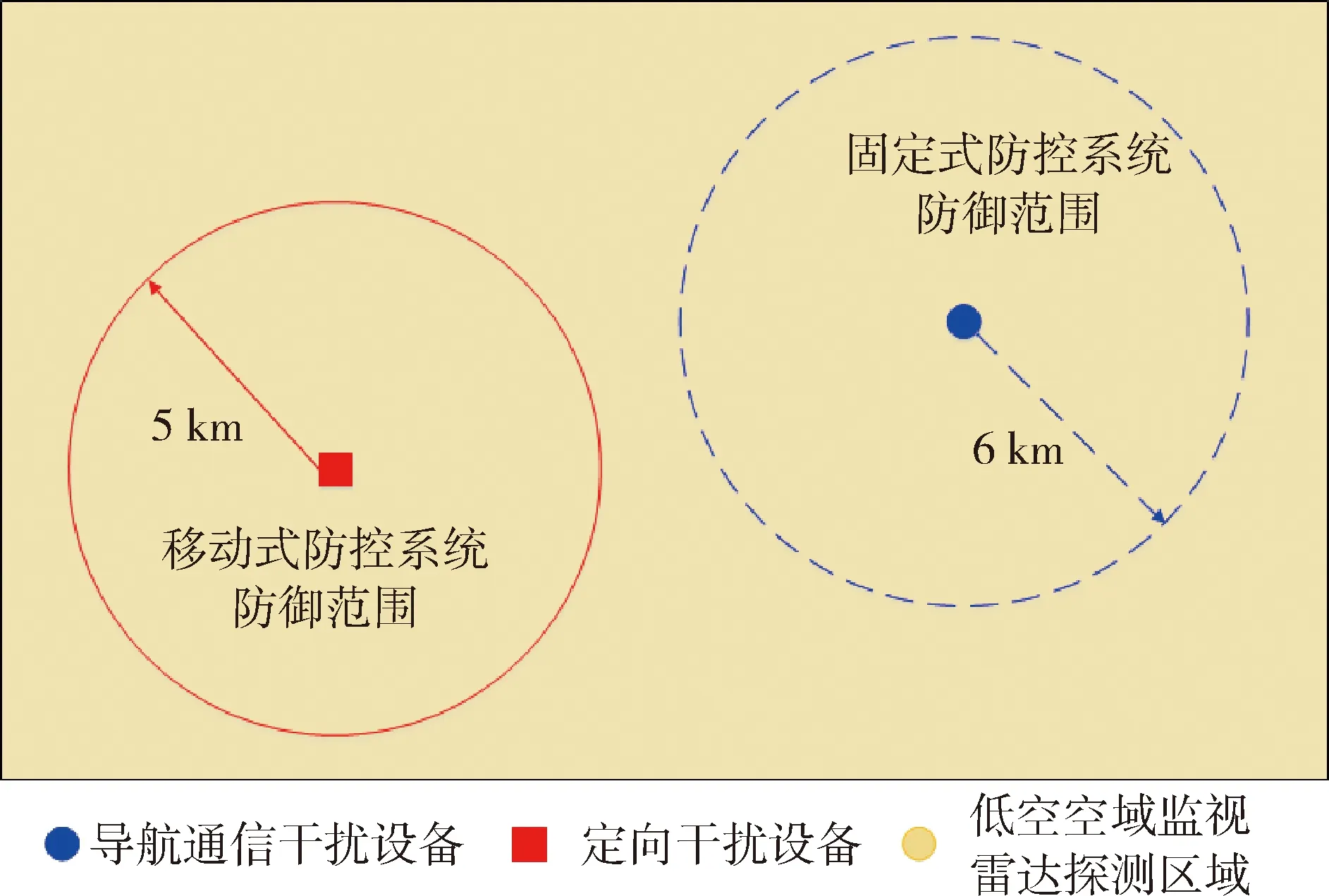
图12 分离式系统部署示意图
3 试点应用
3.1 试点应用背景
中国船舶重工集团于2018年5月至2019年5月在宁夏中卫沙坡头机场,进行了低空通航管理系统的建设,目前正在试点应用阶段。新型重点区域无人机防控系统作为低空通航管理系统中的重点建设内容之一,旨在保障低空空域的安全,对非法侵入低空空域的“低小慢”目标进行防控。
3.2 试点应用情况
3.2.1 试点参与设备
新型重点区域无人机防控系统参试设备包括:低空空域监视雷达、低空小目标探测雷达(车载)、光电设备跟踪设备、光电设备识别(车载)、综合指挥控制设备、车载指挥控制设备、导航通信干扰设备以及定向干扰设备(车载)。
3.2.2 试点部署情况
为测试新型无人机系统的功能和性能,试点应用中,新型无人机防控系统分别采用了重合式部署方式及分离式部署方式。重合式部署方式中,固定防控系统和移动式防控系统均部署在沙坡头机场航管楼附近(图13中的点1和2),主要负责航管楼、航站楼及航油基地等重点设施的低空安全。分离式部署方式中,固定防控系统部署在沙坡头机场航管楼(图13中的点1),移动式防控系统部署在重要的飞机航路上(图13中的点3),主要负责飞行航路上的低空安全,具体部署情况如图13所示。
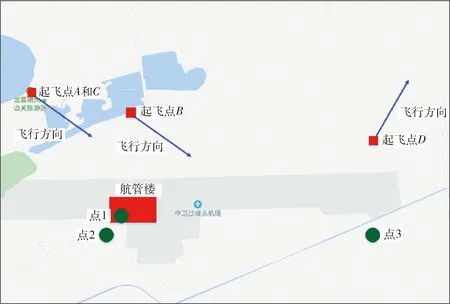
图13 试点应用系统部署示意图
此次试点应用分别使用了2架大疆四旋翼无人机,大疆精灵4(无人机Ⅰ)与大疆精灵4PRO(无人机Ⅱ),实物如图14所示,共进行了2种类型的试验。
试验1: 在沙坡头机场附近同时起飞2架无人机(图13中的点A和点B),模拟“黑飞”的敌对“低小慢”目标,试验主要针对的是重合式部署方式。
试验2: 在沙坡头机场附近(图13中的点C)以及飞机重要飞行航路附近(图13中的点D)同时起飞,模拟“黑飞”的敌对“低小慢”目标,试验主要针对的是分离式部署方式。

图14 试点应用中使用的无人机
3.2.3 试点应用效果
系统按照图10中的运行流程,开始进行无人机防控工作。
对于试验1,首先,低空空域监视雷达和低空小目标探测雷达(车载系统)同时工作进行目标捕捉,低空空域监视雷达和低空小目标探测雷达(车载系统)在短时间内都捕捉到了2架无人机目标,之后将目标信息发送给综合控制设备,综合控制设备调度光电识别跟踪设备对目标身份信息进行确认,确认为无人机后由综合控制设备给两型干扰设备分配目指,最后干扰设备对无人机进行干扰,多次的试验结果表明2架无人机均被成功干扰,被迫悬停或返航,成功体现了系统的多目标协同打击技术。
对于试验2,采取了2种方式,第1种方式中,低空空域监视雷达和低空小目标探测雷达(车载系统)同时工作,低空空域监视雷达在短时间内就捕捉到了2架模拟“黑飞”的无人机,低空小目标雷达也在较短时间内捕捉到了一架模拟“黑飞”的无人机(另一架不在搜索范围内),上传目标信息给综合控制设备后,综合控制设备调度光电识别设备进行身份确认,确认身份后,综合指挥控制设备根据两型干扰设备的打击范围,智能分配目指,由导航通信干扰设备对无人机Ⅰ进行了干扰,定向干扰设备对无人机Ⅱ进行了干扰,多次的试验结果表明均干扰成功。在第2种方式中,低空小目标雷达不开机(模拟故障),车载指挥控制设备使用的是综合控制设备发送的目标信息,同样实现了对无人机的干扰打击,验证了远程协助打击技术的有效性。
试验过程中,无人机被干扰后,操控画面显示如图15所示(因试验次数较多,图中只放了部分干扰画面)。
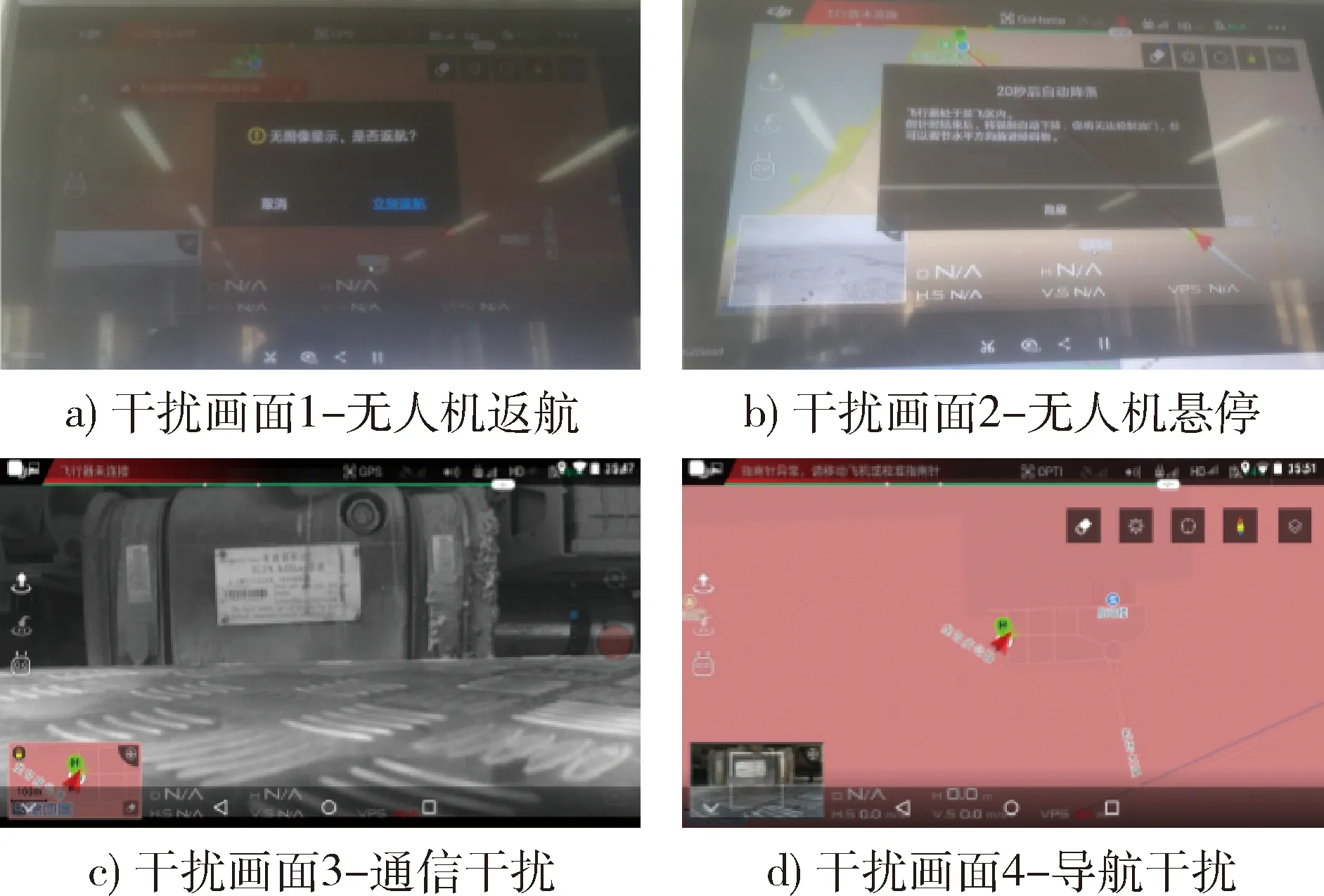
图15 无人机被干扰后的操控画面
从图15中可以看出,2架无人机被干扰后,无人机的操控画面显示飞行器未连接或开始返航等,表明干扰打击成功。
4 结束语
随着无人机技术的不断发展,未来无论在民用或是军用领域,无人机的使用将会越来越多,但同时给低空空域的安全带来了更严峻的挑战。本文提出的新型无人机防控系统通过集成固定式防控系统和移动式防控系统于一体,将各自的优劣势进行互补,有效提高系统机动性的同时,大幅度提升了系统的功能和性能,是对反无人机系统领域的重要探索。
目前,国内外反无人机系统正处于快速发展阶段,但依然面临着许多问题,例如,缺乏新型无人机对抗设备、系统建设成本高、无法有效应对多批次蜂群式无人机攻击等。在后续研究中,应深入分析反无人机作战的需求,密切关注蜂群无人机的发展,不断提出新的反无人机作战策略,同时也要不断研制新的反无人机设备。
猜你喜欢
商用汽车(2021年4期)2021-10-13
军民两用技术与产品(2021年10期)2021-03-16
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
民用飞机设计与研究(2020年4期)2021-01-21
科技视界(2020年8期)2020-05-18
青年文学家(2020年10期)2020-04-27
冰雪运动(2019年3期)2019-08-23
科技创新与应用(2017年5期)2017-03-16
南方文学(2016年3期)2016-06-12
