电压源型直流输电变流器系统动态面反步控制
2020-05-20 15:05胡成江刘加朋于金鹏于海生
青岛大学学报(工程技术版) 2020年2期
胡成江 刘加朋 于金鹏 于海生
摘要: 针对传统反步控制方法中存在的问题,本文主要对电压源型直流输电变流器电网侧变流器系统的有功/无功功率控制问题进行研究。首先引入了反步控制方法,将高阶系统处理为3个低阶子系统,并针对每个子系统设计了控制律,实现对整个系统的控制。其次,由于传统反步控制方法中存在的“计算爆炸”问题,本文通过引入动态面控制技术解决。在本文控制方法下设计的控制器,不需要有功/无功功率高阶导数的信息,且控制器结构简单。为验证本文所提出的VSC-HVDC变流器系统的动态面反步控制方法的有效性,在Matlab/Simulink环境下进行仿真实验。仿真结果表明,在本文控制方法下,系统有功功率和无功功率可以准确跟踪其设定值,而且与传统反步控制方法相比,在本文提出的控制方法下,电网侧变流器系统具有更好的动态响应,说明本文提出的方法具有调节速度快、误差小的优势。该研究对VSC-HVDC系统的控制具有重要意义。
关键词: 反步控制; 动态面控制; 高压直流输电; 变流器; 功率控制; 控制器设计
中图分类号: TM721.1; TM46文献标识码: A
随着当代能源需求的不断增长,海上风力发电技术发展迅速,相比于传统的火力发电,海上风力发电具有发电过程环保、不占用陆地资源和转换率高等优势[13]。目前,海上风力发电并网大部分采用电压源型直流输电变流器(voltage source converter based high voltage direct current transmission, VSC-HVDC)。Zhang G等人[4]建立并研究了VSC-HVDC系统的稳态模型,其所提出的控制方法没有考虑VSC-HVDC系统的动态响应特性,因此,研究VSC-HVDC系统动态模型的控制问题具有重要意义。为了实现更好的控制效果,学者们将滑模控制技术[56]、自适应控制技术[78]、反步控制方法[911]和一些其他的控制技术[1217]应用到高阶系统的控制研究中。反步控制方法是处理高阶系统的有效方法,吴杰等人[12]将反步控制方法应用到VSC-HVDC电网侧变流器系统的功率控制中,相比于传统的双闭环矢量控制方法,在反步控制方法下,VSC-HVDC变流器系统的动态响应速度快。然而VSC-HVDC变流器系统反步控制方法存在两个主要缺点:一是传统反步控制方法的控制器设计过程需要对控制律进行反复求导,从而产生“计算爆炸”的问题;二是在传统反步控制方法在处理高阶系统时,控制器设计过程中需要功率信号的高阶导数信息[12],上述问题导致传统反步控制方法在实际工程中的应用范围受到限制。基于此,本文提出了一种VSC-HVDC变流器系统动态面反步控制方法,将基于动态面技术的反步控制方法应用到VSC-HVDC变流器系统的控制中,通过引入动态面控制方法[1820],解决了传统反步控制方法中存在的两个主要缺点。本文提出的控制方法可保证VSC-HVDC变流器系统的功率控制误差收敛到一个足够小的邻域内。
1 VSC-HVDC系统的数学模型
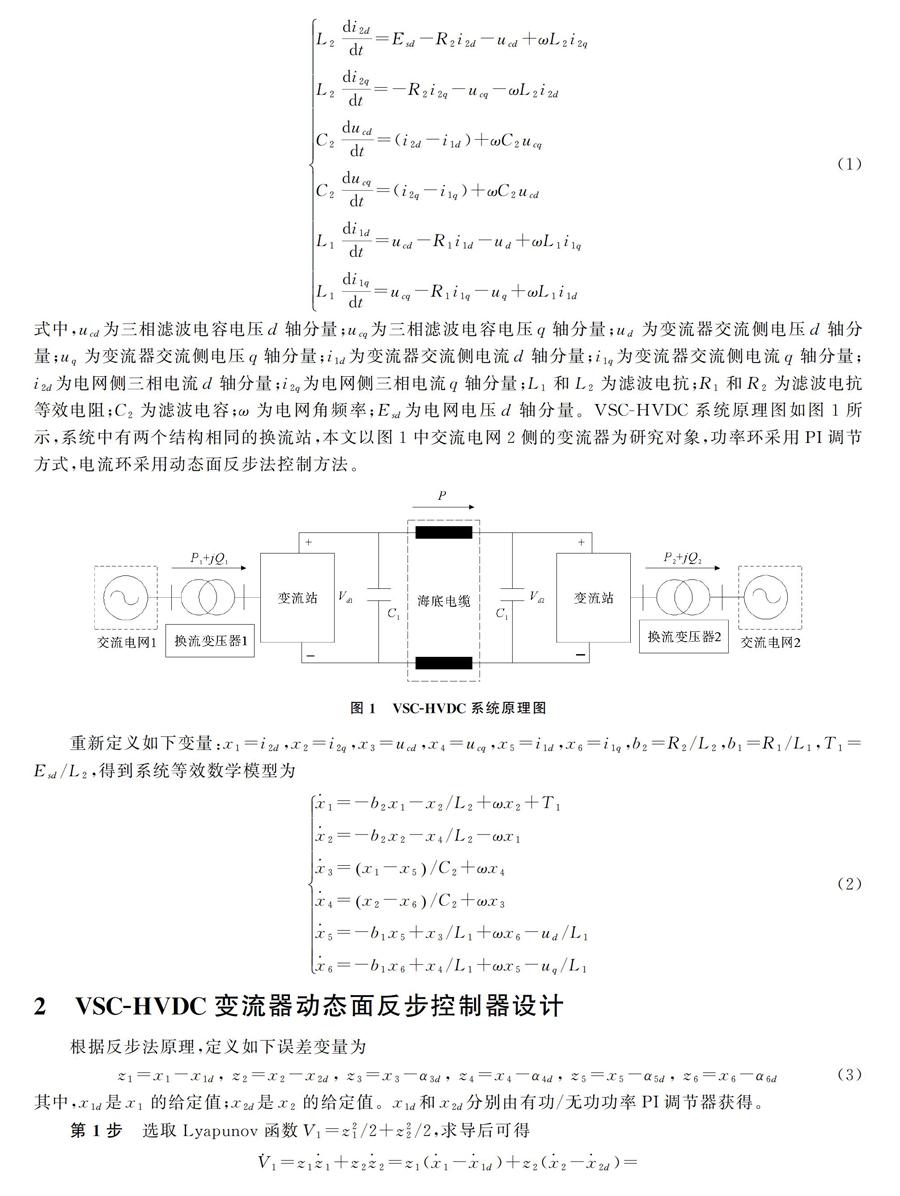
式中,ucd为三相滤波电容电压d轴分量;ucq为三相滤波电容电压q轴分量;ud为变流器交流侧电压d轴分量;uq为变流器交流侧电压q轴分量;i1d为变流器交流侧电流d轴分量;i1q为变流器交流侧电流q轴分量;i2d为电网侧三相电流d轴分量;i2q为电网侧三相电流q轴分量;L1和L2为滤波电抗;R1和R2为滤波电抗等效电阻;C2为滤波电容;ω为电网角频率;Esd為电网电压d轴分量。VSC-HVDC系统原理图如图1所示,系统中有两个结构相同的换流站,本文以图1中交流电网2侧的变流器为研究对象,功率环采用PI调节方式,电流环采用动态面反步法控制方法。
2VSC-HVDC变流器动态面反步控制器设计
根据反步法原理,定义如下误差变量为
z1=x1-x1d, z2=x2-x2d, z3=x3-α3d, z4=x4-α4d, z5=x5-α5d, z6=x6-α6d(3)
其中,x1d是x1的给定值;x2d是x2的给定值。x1d和x2d分别由有功/无功功率PI调节器获得。
第1步选取Lyapunov函数V1=z21/2+z22/2,求导后可得
1=z11+z22=z1(1-1d)+z2(2-2d)=
z1(-b2x1-α3d-α3L2-z3L2-α3L2+ωx2+T1-1d)+z2(-b2x2-α4d-α4L2-z4L2-α4L2+ωx1-2d)(4)
本文中电网电压d轴分量是一个有界值,由T1的定义可知,T1是一个有界的值,且满足T1≤d。由杨氏不等式可得
z1T1≤12ε21z21+12ε21d2(5)
其中,ε1是一个任意小的正数。引入新的状态变量α3d和α4d,使α3和α4分别通过时间常数为ε3和ε4的动态面滤波器,即
ε33d+α3d=α3, α3d(0)=α3(0)
ε44d+α4d=α4, α4d(0)=α4(0)(6)
其中,α3d和α4d是滤波器的输出信号。将式(5)代入式(4)可得
1≤z1(-b2x1-α3d-α3L2-z3L2-α3L2+ωx2-1d+12ε21z1)+
z2(-b2x2-α4d-α4L2-z4L2-α4L2+ωx1-2d)+12ε21d2(7)
构造虚拟控制律α3和α4,即
α3=L2(k1z1-b2x1+ωx2-1d)
α4=L2(k2z2-b2x2-ωx1-2d)(8)
其中,k1=+12ε21,>0,k2>0。将式(8)代入式(7)可得
1≤-k1z21-k2z22-z1(α3d-α3)L2-z2(α4d-α4)L2-z1z3L2-z2z4L2+12ε21d2(9)
第2步选取Lyapunov函数V2=V1+z23/2+z24/2,求导后可得
2=1+z33+z44=1+z3x1C2-x5C2+ωx4-3d+z4x2C2-x6C2-ωx3-4d(10)
引入新的状态变量α5d和α6d,使α5和α6分别通过时间常数为ε5和ε6的动态面滤波器,即
ε55d+α5d=α5, α5d(0)=α5(0)
ε66d+α6d=α6, α6d(0)=α6(0)(11)
其中,α5d和α6d是滤波器的输出信号。将式(6)代入式(10)可得
2=1+z3x2C2-z1L2-α5d-α5C2-z5C2-α5C2+ωx4+α3d-α3ε3+
z4x1C2-z2L2-z6C2-α6d-α6C2-α6C2-ωx3+α4d-α4ε4(12)
构造虚拟控制律α5和α6,即
α5=C2(k3z3+x1/C2-z1/L2+ωx4)
α6=C2(k4z4+x2/C2-z2/L2-ωx3)(13)
其中,k3>0,k4>0。将式(13)代入式(12)可得
2≤-k1z21-k2z22-k3z23-k4z24-z1(α3d-α3)L2-z2(α4d-α4)L2-z3(α5d-α5)C2-z4(α6d-α6)C2+
z3(α3d-α3)ε3+z4(α4d-α4)ε4-z3z5C2-z4z6C2+12ε21d2(14)
第3步选取Lyapunov函数V3=V2+z25/2+z26/2,求导后可得
3=2+z55+z66=
∑4i=1-kiz2i-z1(α3d-α3)L2-z4(α6d-α6)C2-z2(α4d-α4)L2-z3(α5d-α5)C2+12ε21d2+
z3(α3d-α3)ε3+z4(α4d-α4)ε4+z5-b1x5+x3/L1+ωx6-ud/L1+α5d-α5ε5+
z6-b1x6+x4/L1+ωx5-uq/L1+α6d-α6ε6-z3z5C2-z4z6C2(15)
选取系统的真实控制律为
ud=L1(k5z5-b1x5+x5/L1+ωx6-z3/C2)
uq=L1(k6z6-b1x6+x4/L1-ωx5-z4/C2)(16)
其中,k5>0,k6>0。
文献[12]中提出的反步控制方法没有考虑控制器设计过程中因对控制律反复求导而产生“计算爆炸”的问题,由式(16)可知,本文引入了动态面滤波器,解决了传统反步法中存在的“计算爆炸”问题,从而简化了控制器的结构。
3稳定性证明
将式(16)代入式(15),可得
3≤∑6i=1-kiz2i-z1(α3d-α3)L2-z2(α4d-α4)L2-z3(α5d-α5)C2-z4(α6d-α6)C2+
z3(α3d-α3)ε3+z4(α4d-α4)ε4+z5(α5d-α5)ε5+z6(α6d-α6)ε6+12ε21d2(17)
定义动态面滤波器误差为
y3=α3d-α3, y4=α4d-α4
y5=α5d-α5, y6=α6d-α6(18)
将式(6)和式(11)代入式(18),可得
3=-α3d-α3ε3-3=-y3ε3+D3, 4=-α4d-α4ε4-4=-y4ε4+D4
5=-α5d-α5ε5-5=-y5ε5+D5, 6=-α6d-α6ε6-6=-y6ε6+D6(19)
其中,D3=-3;D4=-4;D5=-5;D6=-6。
由文獻[19]可知,D3,D4,D5和D6在紧集Ωi,(i=3,4,5,6)上具有最大值DiM,即Di≤DiM。由此,得不等式为
yii≤-y2i/εi+DiMyi≤-y2i/εi+12τD2iMy2i+τ2(20)
其中,i=3,4,…,6;τ>0。由杨氏不等式可得
-y3z1L2≤y23/4L2+z21/L2, -y4z2L2≤y24/4L2+z22/L2
-y5z3C2≤y25/4C2+z23/C2, -y6z4C2≤y26/4C2+z24/C2
y3z3ε3≤y23/4ε3+z23/ε3, y4z4ε4≤y24/4ε4+z24/ε4
y5z5ε5≤y25/4ε5+z25/ε5, y6z6ε6≤y26/4ε6+z26/ε6(21)
为了证明整个系统的稳定性,选取系统的Lyapunov为:V=V3+y23/2+y24/2+y25/2+y26/2,对V求导,得
≤∑6i=1-kiz2i-z1L2y3-z2L2y4-z3C2y5-z4C2y6+z3ε3y3+z4ε4y4+z5ε5y5+
z6ε6y6+12ε21d2+y33+y44+y55+y66(22)
将式(20)和式(21)代入式(22),可得
≤∑6i=1-kiz2i+y234L2+z21L2+y244L2+z224L2+y254C2+z23C2+y264C2+z24C2+y234ε3+z23ε3+
y244ε4+z24ε4+y254ε5+z25ε5+y264ε6+z26ε6-y23ε3+12τD23My23+τ2-y24ε4+τ2-y26ε6+
12τD24My24-y25ε5+12τD25My25+12τD26My26+τ2+τ2+12ε21d2≤-aV+b(23)
其中,a=min2k1-1L2,234ε3-14C2-12τD23M,2k2-1L2,2k3-1C2-1ε3,2k4-1C2-1ε4,234ε4-
14L2-12τD24M,2k5-1ε5,234ε5-14C2-12τD25M,2k6-1ε6,234ε6-14C2-12τD26M;b=2τ+12ε21d2。由式(23)可得
Vt≤V(t0)-bae-a(t-t0)+ba≤V(t0)+ba,t≥t0(24)
式(24)表明,zi(i=1,2,3,4,5,6)属于紧集Ω={(vi,)V≤V(t0)+b/a,t≥t0。由式(24)可求得[19]limt→∞zi≤2b/a。当选定参数ki,ε3,ε4,ε5和ε6,选取足够小的τ和ε1,可以保证系统的跟踪误差zi足够小。
4仿真分析
为验证本文所提出的VSC-HVDC变流器系统的动态面反步控制方法的有效性,在Matlab/Simulink环境下进行仿真实验。实验过程中,对参数进行标幺化。系统模型中选定的参数为:L1=0.006 H,L2=0.001 7 H,C2=0.000 06 F,R1=0.25 Ω,R2=0.25 Ω,Esd=35 kV。
选取控制器参数为:k1=38 500,k2=2 600,k3=555,k4=660,k5=99 800,k6=140 000,ε4=0.001 8,ε3=0.05,ε5=0.833 3,ε6=0.004 4。
選取PI调节参数为:Kp1=Kp2=900,Ki1=Ki2=1 000。
选择有功功率的设定值为:Pr=0.4 MW, 0≤t≤1
0.8 MW, t>1。
选择无功功率给定的设定值为:Qr=0.2 MVar, 0≤t≤1
0.4 MVar, t>1。
在本文控制方法下,有功功率跟踪曲线如图2所示,无功功率跟踪曲线如图3所示。图2和图3中,P1为系统有功功率响应,Pr为系统有功功率期望值,其初始值为0,Q1为系统无功功率响应曲线。由图2可以看出,系统有功功率可以准确跟踪其期望值;由图3可以看出,系统无功功率可以准确跟踪其期望值。
在本文动态面反步控制方法下,系统的功率跟踪误差曲线如图4所示,由图4可以看出,系统的功率调节误差在0.006 s时收敛;在传统反步控制方法下,系统的有功功率跟踪曲线如图5所示,图5中,Pb为传统反步控制方法下系统的有功功率响应曲线,由图5可以看出,系统有功功率在0.02 s时能够跟踪其期望值。
在传统反步控制方法下,系统的无功功率跟踪曲线如图6所示,图6中,Qb为传统反步控制方法下系统的无功功率响应曲线,由图6可以看出,系统有功功率在0.025 s时能够跟踪其期望值;在传统反步控制方法下,系统的功率跟踪误差曲线如图7所示,图7与图5相比可知,本文提出的方法具有调节速度快、误差小的优势。
在本文控制方法下,x1和x1d跟踪曲线如图8所示,x2和x2d跟踪曲线如图9所示,由图8和图9可以看出,x1和x2可以快速的跟踪期望值。x1和x2跟踪误差曲线如图10所示,由图10可以看出,在本文控制方法下,系统的跟踪误差能够快速的稳定到零点附近的小邻域内。
为了验证在实际工程中缺少功率给定值的高阶导数信息时,本文所提出的控制方法仍然有效,在仿真实验中,重新选取功率的设定值为
在本文控制方法下,系统的有功功率跟踪曲线如图11所示,系统的无功功率跟踪曲线如图12所示。图11中,P1为系统有功功率响应,Pr为系统有功功率期望信号,其初始值为0。由图11可以看出,系统的有功功率可以快速准确跟踪其期望值。图12中,Q1为系统无功功率响应曲线,Qr为系统无功功率期望值,其初始值为0,由图12可以看出,系统的无功功率可以准确跟踪其期望值。在动态面反步控制下,系统的功率跟
踪误差曲线如图13所示,由图13可以看出,系统的功率调节误差在0.004 s时刻收敛。在传统反步控制方法下设计的控制器,需要功率信号的高阶导数信息,由图11~图13可知,本文提出的经过改进的反步控制方法,在功率信号高阶导数不存在的情况下,仍能实现有功功率和无功功率的快速协调控制。
5结束语
本文将反步控制方法与动态面控制技术相结合,实现了对VSC-HVDC变流器系统的有功/无功功率协调控制。引入反步控制方法解决了高阶系统控制器设计复杂困难的问题。采用动态面技术解决了传统反步控制方法中存在的“计算爆炸”问题,从而控制器的结构得以简化。同时,动态面控制技术克服了传统反步方法控制器设计过程中需要功率给定值的高阶导数信息问题。仿真结果表明,本文所提出的控制方法能够有效实现对电压源型高压直流输电变流器系统功率的协调控制,并可根据需要提供一定容量的无功功率补偿。
参考文献:
[1]Wang Q, Yu Z P, Ye R, et al. An ordered curtailment strategy for offshore wind power under extreme weather conditions considering the resilience of the grid[J]. IEEE Access, 2019(7): 5482454833.
[2]Erlich I, Shewarega F, Feltes C, et al. Offshore wind power generation technologies[J]. Proceedings of the IEEE, 2013, 101(4): 891905.
[3]Vos K D, Driesen J, Belmans R. Assessment of imbalance settlement exemptions for offshore wind power generation in Belgium[J]. Energy Policy, 2011, 39(3): 14861494.
[4]Zhang G B, Zheng X. Steady-state model for VSC based HVDC and its controller design[C]∥Power Engineering Society Winter Meeting. Hangzhou: IEEE, 2001.
[5]陈创庭, 周志成, 陈俊武. 滑模变结构控制在高压直流输电系统上的应用研究[J]. 广东电力, 2006, 19(11): 15.
[6]游国栋, 李继生, 侯勇, 等. 单相光伏并网逆变器的反步滑模控制策略[J]. 电网技术, 2015, 39(4): 916923.
[7]Ahmad S, Khan L. Adaptive feedback linearization based HVDC damping control paradigm for power system stability enhancement[C]∥2016 International Conference on Emerging Technologies. Islamabad, Pakistan: IEEE, 2017.
[8]胡亚强, 于金鹏, 赵林, 等. 基于命令滤波技术的水下机器人位置跟踪控制[J]. 青岛大学学报: 工程技术版, 2019, 34(1): 95100.
[9]王宝华, 蒋力. 基于精确反馈线性化的直流微电网双向直流变流器反步滑模控制[J]. 电力系统保护与控制, 2018, 46(2): 4349.
[10]Zhao X D, Li K. Control of VSC-HVDC for wind farm integration based on adaptive backstepping method[C]∥IEEE International Workshop on Intelligent Energy Systems. Vienna, Austria: IEEE, 2014.
[11]杨俊华, 陈凯阳, 王秋晶, 等. 电压源型高压直流输电系统的反步变结构控制[J]. 控制理论与应用, 2014, 31(11): 15481554.
[12]吴杰, 王志新, 王国强, 等. 電压源型直流输电变流器系统中电网侧变流器的反步法控制[J]. 控制理论与应用, 2013, 30(11): 14081413.
[13]Yu J P, Shi P, Dong W J, et al. Observer and command filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems[J]. IEEE Trans on Industrial Electronics, 2015, 62(9): 59625970.
[14]康忠健, 张梓霖, 李鑫, 等. MMC-HVDC系统的模糊PI优化控制[J]. 浙江电力, 2019, 38(8): 5964.
[15]Chen X, Wang L, Sun H S, et al. Fuzzy logic based adaptive droop control in multi-terminal HVDC for wind power integration[J]. IEEE Transactions on Energy Conversion, 2017, 32(3): 12001208.
[16]黄俊铭, 朱建全, 庄远灿. 基于动态RBF神经网络的广义电力负荷建模[J]. 电网技术, 2018, 42(2): 591597.
[17]Schnleber K, Collados C, Pinto R T, et al. Optimization-based reactive power control in HVDC-connected wind power plants[J]. Renewable Energy, 2017, 109: 500509.
[18]Swaroop D, Gerdes J C, Yip P P, et al. Dynamic surface control of nonlinear systems[C]∥American Control Conference. Albuquerque, NM, USA: IEEE, 1997.
[19]Yu J P, Shi P, Dong W J, et al. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors[J]. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(3): 640645.
[20]张国斌, 于金鹏, 于海生, 等. 永磁同步电机模糊离散调节控制[J]. 电机与控制应用, 2019, 46(4): 17.
Dynamic Surface Backstepping Control for Voltage Source
Converter-High Voltage Direct Current Transmission Converter SystemsHU Chengjiang, LIU Jiapeng, YU Jinpeng, YU Haisheng
(School of Automation, Qingdao University, Qingdao 266071, China)Abstract: In view of the problems existing in the traditional backstepping control method, this paper mainly studies the active/reactive power control of the grid side converter systems of voltage source converter based high voltage direct current transmission converter. First, the backstepping control method is introduced to treat the high-order system as three low-order subsystems, and then the control laws are designed for each subsystem to realize the control of the whole system. Secondly, due to the fact that the problem of “explosion of complexity” exists in the traditional backstepping control method, this paper introduces the dynamic surface control technology to overcome the problem of “explosion of complexity”. The controller designed in this paper does not require the information of high order derivative of active/reactive power, at the same time, the structure of the controller in this paper is simple. Finally, the simulation experiments are carried out in Matlab/Simulink environment to verify the effectiveness of the dynamic surface backstepping control method proposed in this paper. The simulation results show that under the control method in this paper, the active power and reactive power can accurately track their set values. The control method proposed in this paper has better dynamic response compared with the traditional control method. The method proposed in this paper has the advantages of fast regulation speed and small error, which is of great significance to the control of VSC-HVDC systems.
Key words: backstepping control; dynamic surface control; VSC-HVDC; converter; power control; controller design
收稿日期: 2019-12-16; 修回日期: 2020-02-03
基金项目: 国家重点研发计划(2017YFB1303503);国家自然科学基金资助项目(61973179,61573203);泰山学者工程专项经费资助(TSQN20161026)
作者简介: 胡成江(1994-),男,硕士研究生,主要研究方向为电网系统控制。
通信作者: 于金鹏(1978-),男,山东乳山人,教授,博士生导师,泰山学者,主要研究方向为电能变换与电机系统控制。 Email: yjp1109@126.com