基于回归算法的三相异步电动机电参数辨识模型研究
2020-05-20 15:05林凯季涛张雪原
青岛大学学报(工程技术版) 2020年2期
林凯 季涛 张雪原

摘要:针对电能表测量三相异步电动机电参数成本高、安装复杂的问题,本文研究了一种基于回归算法的三相异步电动机电参数辨识模型。利用实际测量的三相异步电动机相关电参数数据,分析一元回归模型和二元回归模型分别用于电动机电参数辨识的特点,确定了以电动机线电流为自变量,有功功率为因变量的一元回归建模方式,在此基础上,分别采用一元线性回归模型和一元四次非线性回归模型,对三相异步电动机电参数进行辨识。研究结果表明,两种模型都能较准确的辨识电动机电参数,但一元四次非线性回归模型在点辨识精度和点辨识最大误差率方面具有更好的辨识性能,现场试验验证了其可行性和有效性。该研究为企业电动机电参数测量提供了新方法,具有较高的工程应用价值。
关键词:三相异步电动机; 电参数辨识; 一元非线性回归
中图分类号: TM343+.2文献标识码: A
近年来,以互联网、大数据和人工智能为代表的新一代信息技术与经济社会各领域进行了深度融合,而互联网与能源的深度融合,实现了工业企业的数字化能源监管,是企业提高能源管理利用水平和能源利用效率的重要途径[1-3]。目前,在多数企业用能中,电能消耗占比最大,主要是电动机的电能消耗。由于电动机数量众多,分布现场复杂,因此实现每台电机用电参数的有效监测成为数字化能源监管的重要组成部分。传统三相异步电动机电能的计量主要采用就地安装电能表的方式,通过在被测设备前端加装电能表,实时采样电流与电压,进而计算得出电能损耗。然而通过安装电表的方式实现每台电动机的电参数在线计量,不但造价高,工程施工困难,而且维护也不方便[4-10]。基于此,本文提出利用三相异步电动机实际运行的线电流数据,采用一元非线性回归模型建模,得到三相异步电动机有功功率与线电流数据的数学模型,并根据模型辨识,得到电动机有功功率和功率因数等电参数,实现不安装电能表就达到快速辨识电动机用电参数的目的。本方法无需额外增加计量设备,只需读取电动机线电流就可辨识出电动机工频运行电参数,且辨识精度较高。由于单台电动机电参数监测不作为电能计量结算点,所以本方法能够满足企业内部数字化能源监管的工程需求。该研究应用前景广阔。
1 电参数辨识模型分析
1.1 电参数辨识原理
由电机学可知,三相异步电动机有功功率、无功功率、功率因数、视在功率满足如下条件,即
其中,P、Q、S分别为三相异步电动机的有功、无功及视在功率;cos φ为电动机的功率因数;U为电动机的线电压;I为电动机的线电流[11-12]。
电能的大小等于有功功率与时间的积分。由式(1)可知,有功功率与线电压、线电流和功率因数有关,而电动机在正常工频条件下的工作环境相对固定,其线电压与就近母线电压几乎相等,可作为常数处理,因此三相异步电动机有功功率的变化主要取决于其电流和功率因数的变化。由于电动机功率因数随负载的增加而增加,在额定负载附近功率因数最高,功率因数与有功功率呈现某种函数关系,因此有功功率与线电流也会呈某种函数关系。将三相异步电动机有功功率作为因变量,根据电动机运行历史数据,采用回归分析法做函数逼近,得到有功功率与线电流以及功率因数的函数关系[13-16]。
1.2 模型分析
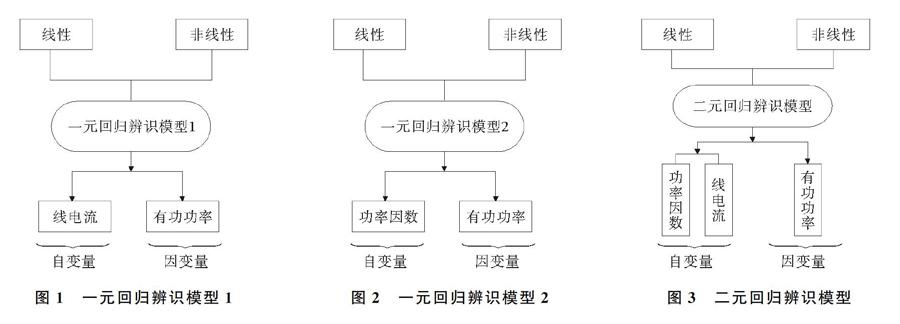
将三相异步电动机有功功率作为因变量,线电流或功率因数作为自变量,或将两者共同作为自变量,可以建立3种回归模型,即:以线电流为自变量,有功功率为因变量的一元回归辨识模型,定义为一元回归辨识模型1,一元回归辨识模型1如图1所示;以功率因数为自变量,有功功率为因变量的一元回归辨识模型,定义为一元回归辨识模型2,一元回归辨识模型2如图2所示;以线电流和功率因数为自变量,有功功率为因变量的二元回归辨识模型,定义为二元回归辨识模型,二元回归辨识模型如图3所示。
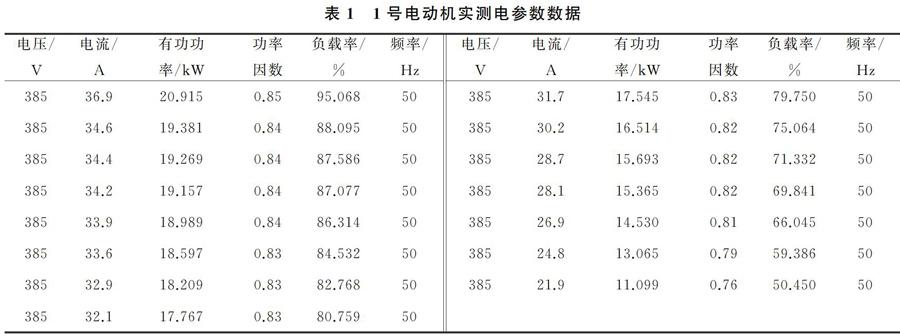
本文以某企业随机选取的一台实际运行三相异步电动机为研究对象,定义为1号电动机,电机类型为YE2-180M-2,上海东方威尔电机有限公司;電机接线方式为三角形接线;额定电压为380 V;额定电流为41.1 A;额定功率为22 kW;额定转速为2 940 r/min。
对1号电动机电参数进行现场测量,实测得到不同负载率状态下的相关电参数数据。1号电动机实测电参数数据如表1所示。
利用实测数据,分别绘制有功功率与线电流散点图,1号电动机有功功率与线电流散点图如图4所示;绘制有功功率与功率因数散点图,1号电动机有功功率与功率因数散点图如图5所示;绘制有功功率与线电流及功率因数三维散点图,1号电动机有功功率与线电流及功率因数散点图如图6所示。
由图4可以看出,三相异步电动机的有功功率与电流之间存在近似的线性关系;由图5可以看出,有功功率与功率因数之间也存在近似的线性关系,但图4中线电流数值变化范围大,图5中功率因数变化范围小,数据震荡明显,且功率因数现场测量复杂;由图6可以看出,以电流和功率因数为自变量时,有功功率的变化可近似为一条螺旋上升的曲线,其模型辨识难度大,且规律不明显。因此,在利用回归法对电动机电参数辨识时,应将电动机有功功率作为因变量,线电流作为自变量,利用一元回归辨识模型进行电参数辨识。
2 一元回归电参数辨识建模
2.1 一元线性回归辨识模型
三相异步电动机相关电参数的辨识目标是得到与真实值足够接近的有效电参数。根据1号电动机的型号规格,得到辨识模型的目标与约束集合[17-19]为
式中, 1为1号电动机有功功率的辨识值;P1为1号电动机有功功率的真实值;I1为1号电动机的电流实测值。以表1的数据为建模基础数据,利用Matlab曲线拟合工具,选定一元线性回归模型,1号电动机一元线性回归模型拟合曲线如图7所示。
三相异步电动机电参数线性辨识模型为
定义误差率为辨识值与实测值的差除以实测值的绝对值,即
式中Er为误差率;A为辨识值;E为实测值。
根据式(3)和式(4),结合表1数据,得到1号电动机对应实测值的辨识数据。1号电动机一元线性回归辨识模型计算结果如表2所示。
为了验证式(3)的可行性,对所建的一元线性辨识模型进行统计检验。根据统计学相关知识[20]有
式中,SSE为和方差,表示辨识数据与真实数据之间误差的平方和;RMSE为均方根,也称回归系统的辨识标准差。
分析得到1号电动机一元线性回归辨识模型检验结果,检验结果汇总表如表3所示。
由表3可以看出,式(3)所构建的一元线性回归辨识模型具备较高的电参数辨识精度,最大误差率为1.074%,且辨识模型的相关系数R值接近于1,SSE以及RMSE值均接近于0。
2.2 一元非线性回归辨识模型
以表1中的数据为基础建模数据,利用Matlab曲线拟合工具,对1号电动机有功功率和线电流进行一元非线性回归建模,分别对一元二次回归到一元四次回归以及更高次数的回归模型进行建模分析和数据验证。由分析验证结果可以看出,一元四次非线性回归模型的辨识精度最高。因此,本文以一元四次非线性回归进行建模,得到三相异步电动机电参数线性辨识模型为
式中, ′ 1为1号电动机在一元四次非线性回归模型下有功功率的辨识值。1号电动机一元四次非线回归模型拟合曲线如图8所示。
根据式(4)和式(6),结合表1数据,计算分析得到1号电动机一元四次线性回归辨识模型的检验结果,检验结果汇总表如表4所示。
由表4可以看出,式(6)所构建的一元线性回归辨
识模型具备较高的电参数辨识精度,最大误差率为 0.629 00%,且辨识模型的相关系数R值接近于1,SSE以及RMSE值均接近于0。对比表3和表4可以看出,利用一元非线性回归辨识1号电动机电参数,比一元线性回归的最大误差率更低。
3 电参数辨识模型验证
3.1 辨识方法检验
为验证模型通用性,随机测得3台三相异步电动机在工频状态下的相关电参数,将3台电动机依次定义为2号、3号、4号电动机,分别建立一元线性和一元四次非线性辨识模型。一元线性回归模型为
式中, i为第i台电动机的有功功率辨识值;Ii为第i台电动机的线电流实测值。
一元四次非线性模型为
式中, ′ i为第i台电动机的有功功率辨识值。
针对3台三相异步电动机,分别计算得到一元线性回归辨识模型和一元四次非线性回归辨识模型的检验结果。一元线性回归辨识模型检验结果汇总表如表5所示;一元四次线性回归辨识模型检验结果汇总表如表6所示。
由表5和表6可以看出,利用本文电参数辨识方法对随机选取的3台三相异步电动机进行建模辨识,均能满足实际需求。利用一元四次非线性回归辨识比一元线性回归具有更低的最大误差率。
3.2 辨识性能分析
由验证结果可知,两种辨识模型都能对工频运行条件下的三相异步电动机进行电参数高精度辨识,分析随机选取的4台电动机的点辨识精度和点辨识最大误差率。
3.2.1 点辨识精度
以1号电动机为研究对象,在两种模型下,构建有功功率的辨识误差率折线图,1号电动机有功功率辨识误差率折线图如图9所示。由图9可以看出,在对1号三相异步电动机进行辨识过程中,一元四次非线性回归模型的辨识精度明显优于一元线性回归模型。与此同时,一元线性回归辨识模型的误差率波动十分明显。分别对2,3,4号电动机进行相同分析,也得到同样的结论。
3.2.2 点辨识最大误差率
在两种模型下,构建4台电动机的有功功率辨识最大误差率折线图,4台电动机有功功率辨识最大误差率折线图如图10所示。由图10可以看出,利用两种模型分别对4台三相異步电动机进行电参数辨识,得到的最大误差率均小于2%,并且4台电动机一元四次非线性回归模型的最大误差率均小于一元线性回归模型最大误差率。
由以上分析可以看出,利用一元四次非线性回归模型,只要检测三相异步电动机的线电流,就可以辨识出电动机有功功率、功率因数等电参数,并且相比于一元线性回归模型,其点辨识精度更高,点最大误差率更小。因此,选用一元四次非线性回归模型实现三相异步电动机电参数辨识。
4 结束语
本文利用三相异步电动机实际运行的线电流数据,采用线电流和有功功率建立一元四次非线性回归模型,辨识得到电动机有功功率、功率因数等电参数,实现了不安装电能表就能快速辨识电动机用电参数。本文提出的三相异步电动机电参数辨识模型在实际工程应用中实现方法简单,辨识结果精度较高。该研究具有广阔的工程应用前景。本研究下一步将考虑利用尽量少的现场实测线电流数据,仍然能够应用该辨识模型识别电动机电参数的方法,减少建模复杂度,进一步增强实用性。
参考文献:
[1]张承刚. 高校校园能耗监管系统设计与实现[D]. 济南: 山东大学, 2014.
[2]蒋文程. 能源“十三五”体制改革启动油气电力改革是重点[J]. 能源研究与信息, 2014(3): 156.
[3]谢国荣, 王迟, 黄子杰, 等. 基于数据挖掘的能源监管系统研发[J]. 国外电子测量技术, 2018, 37(4): 70-77.
[4]严童, 周清华, 陈明, 等. 基于PDA的电能计量数据自动采集平台设计[J]. 自动化与仪器仪表, 2019(11): 119-122.
[5]张建文, 杨艳, 申磊, 等. 基于MSP430电能参数测量装置设计[J]. 青岛大学学报: 工程技术版, 2013, 28(3): 15-18.
[6]林国营. 高精度多功能三相电能表[D]. 上海: 上海交通大学, 2008.
[7]晏苏红. 多功能表测量装置研究与设计[J]. 自动化应用, 2018(5): 60-62.
[8]唐旭明, 翁东波, 宋雅楠, 等. 基于非迭代多点插值DFT的谐波电能计量算法[J]. 自动化仪表, 2019, 40(11): 6-11.
[9]陈国炎, 卓菡. 非正弦状态下有功功率和功率因数测试[J]. 电测与仪表, 2006, 43(492): 7-10, 47.
[10]闫鑫, 路军, 张洪伟, 等. 基于RN8302的三相高压电能表研究[J]. 青岛大学学报: 工程技术版, 2017, 32(4): 21-24, 41.
[11]许翏. 电机与电气控制技术[M]. 2版. 北京: 机械工业出版社, 2017.
[12]谢宝昌. 电机学[M]. 北京: 机械工业出版社, 2017.
[13]Raudys S J, Jain A K. Small sample size effects in statistical pattern recognition: recommendations for practitioners[J]. IEEE transactions on pattern analysis and machine intelligence, 1991, 13(3): 252-264.
[14]沙良彬, 籍艳, 万立娟. 输出误差自回归系统的分解梯度迭代算法研究[J]. 青岛大学学报: 工程技术版, 2019, 34(3): 39-43, 51.
[15]李勇. 基于灰色理论的线性回归模型的参数理论及应用[J]. 数理统计与管理, 2012, 31(3): 440-446.
[16]Chiu K S, Li T. Oscillatory and periodic solutions of differential equations with piecewise constant generalized mixed arguments[J]. Math Nachr, 2019, 292: 2153-2164.
[17]Ngo T T, Bellali J M, Saad Y. The trace ratio optimization problem[J]. SIAM Review, 2012, 54(3): 545-569.
[18]郝攀, 陈栋, 张德凯. 基于非线性回归分析的保险杠横梁优化设计[J]. 制造业自动化, 2018, 40(2): 46-48.
[19]Jiang W H, Chung Fulai. A trace ratio maximization approach to multiple kernelbased dimensionality reduction[J]. Neural networks, 2014, 49: 96-106.
[20]Huang P, Li T, Shu Z Q, et al. Localityregularized linear regression discriminant analysis for feature extraction[J]. Information Sciences, 2018, 429: 164-176.
Research on the Identification of Electrical Parameters of ThreePhase Asynchronous Motor Based on Regression Algorithm
LIN Kai1, JI Tao2, ZHANG Xueyuan2
(1. School of Automation, Qingdao University, Qingdao 266071, China;
2. Information and Control Engineering, Weifang University, Weifang 261061, China)
Abstract:In view of the shortcomings of the traditional filed energy meter, such as high cost and complex installation and maintenance, this paper studies a model of the threephase motor electrical parameters based on regression algorithm. The actual line current and active power of the motor are used as the modeling data. The characteristics of the application of the unary regression model and binary regression model in the identification of the electric parameters are analyzed in detail. A linear regression model and a four order nonlinear regression model are established to identify the measured electrical parameters. Based on that, the unary regression modeling method with current as the independent variable and active power as the dependent variable is determined. The results show that both modelscan accurately identify the motorselectrical parameters, but the unary four order nonlinear regression model has better identification performance in the accuracy of point identification and the maximum error rate of point identification. The feasibility and effectiveness of the method are verified by field test. This study provides a new method for the measurement of electric parameters of electric motors in enterprises and has a high engineering application value.
Key words:three phase asynchronous motor; electrical parameter identification; unary nonlinear regression
收稿日期: 2020-01-02; 修回日期: 2020-02-15
基金項目: 潍坊市科技发展计划项目(2017GX009)
作者简介: 林凯(1993-),男,山东临沂人,硕士研究生,主要研究方向为数字化能源监管技术。
通信作者: 季涛(1975-),男,山东潍坊人,博士,教授,硕士生导师,主要研究方向为能量系统优化控制技术。 Email: jitsdu@126.com