PMSM驱动的机器人规定性能反步自抗扰控制
2020-05-20 15:05薛晔于海生吴贺荣
青岛大学学报(工程技术版) 2020年2期
薛晔 于海生 吴贺荣

摘要:为提高机器人轨迹跟踪的精度与抗扰动能力,本文以永磁同步电机机(permanent magnet synchronous motor,PMSM)驱动的二自由度刚性关节机器人为研究对象,提出规定性能的反步自抗扰位置控制。该方法结合反步法与自抗扰技术,通过扩展状态观测器(extend states observers,ESO)补偿不确定的动态和扰动,利用跟踪微分器(track differentiator,TD)代替虚拟控制信号的导数,消除非线性函数的重复微分引起的“计算爆炸”,设计规定性能函数提高位置跟踪的速度和精度,并结合电机矢量控制策略,设计反步电流控制器。通过输入状态稳定定理进行稳定性分析,证明系统状态能渐进收敛到原点的任意小邻域内。仿真结果表明,相比于无规定性能控制,本文提出的规定性能反步自抗扰控制,控制精度更高,收敛速度更快,有良好的动态和稳态性能。该控制方法具有较高的位置跟踪精度和较强的抗干扰能力。
关键词:机器人关节驱动系统; PMSM; 规定性能; 反步法; 自抗扰
中图分类号: TP242.2; TM921.54; TP276文献标识码: A
文章编号: 1006-9798(2020)02-0075-08; DOI: 10.13306/j.1006-9798.2020.02.012
收稿日期: 2020-01-10; 修回日期: 2020-02-20
刚性关节机器人由机械臂、驱动电机及传动装置等构成,是具有强非线性和不确定性的系统,针对刚性关节机器人的研究,为了简化控制器设计,仅从机器人动力学角度出發,忽略了电机和传动装置的动态特性[1-2]。一方面,闭环系统性能难以保证,甚至导致系统不稳定,另一方面,电机动力学是整个机器人动力学的重要组成部分,尤其在高速运动和高变化载荷情况下,考虑电机的动态性能,在机器人高精度位置控制中很有必要[3-5]。目前,在关节机器人位置控制中,反步控制提出虚拟控制律的概念,将高阶系统划分为若干低阶系统,递推构建出整个系统的控制算法。李雅普诺夫函数的选择和控制器设计时具有较大的灵活性,然而随着系统阶数增加,虚拟控制律的复杂导数计算将导致“计算爆炸”,而通过模糊或神经网络在线辨识虚拟变量导数,针对高阶系统十分费力[6]。J. A. Farrell等人[7]提出命令滤波反步控制,使用命令滤波近似虚拟变量的导数,并构造辅助状态减少滤波误差;Pan Y P等人[8]提出一种自适应的二阶命令滤波,控制性能更好;韩京清[9]提出自抗扰控制方法,其中微分跟踪器给出跟踪信号的导数,可以同反步法结合,消除非线性函数重复微分引起的“计算爆炸”,同时扩张状态观测器,对系统总扰动进行观测,具有更强的鲁棒性;C. P. Bechlioulis等人[10]首次提出通过构造规定性能函数,保证跟踪误差收敛到指定的性能边界,收敛速度不小于给定值,保证了控制系统的瞬态性能,这对防止机器人性能退化和系统损坏具有重要意义。基于此,本文将隐极式PMSM作为驱动电机,设计规定性能的反步自抗扰位置控制器,通过扩张状态观测器补偿不确定的扰动,不依赖精确的数学模型,利于跟踪微分器,解决反步法“计算爆炸”问题,构造性能函数,约束位置跟踪误差的跟踪速度与精度,同时结合电机矢量控制策略,设计反步电流控制器,实现电流快速跟踪,进而完成对机器人系统的整体控制。该研究对机器人系统控制具有重要意义。
1机器人模型
1.1刚性关节机器人本体动力学模型
根据欧拉-拉格朗日方程,忽略电机和传动装置,仅考虑二自由度刚性机器人本体,其动力学模型为[11]
其中,q、、∈R2分别为机器人关节转动位置、角速度、加速度向量;τR∈R2为机器人关节输入力矩向量;Dq∈R2×2为对称正定惯性矩阵;Cq,∈R2×2为哥式力与离心力矩阵;Gq∈R2为重力矩向量;Ff()为机器人本体侧摩擦力向量。
1.2PMSM驱动的刚性关节机器人模型
传动装置是将电机的力和运动传递给机器人本体的中间装置,刚性关节机器人的关节输入力矩同电机负载转矩存在线性关系,隐极永磁同步电机的动力学模型为[12]
式中,qm、m、m∈R2为电机位置、机械角速度、角加速度向量;qm=η-1q;τL∈R2为电机负载转矩,τL=ητR,η为传动装置减速比矩阵;τ∈R2为电机电磁转矩。结合式(1)、式(2)及PMSM数学模型[13],PMSM驱动的刚性关节机器人模型为
式中,(q)=ηD(q)+η-1Jm;(q,)=ηC(q,);(q)=ηG(q);f()=ηFf();id、iq∈R2分别为d轴和q轴的定子电流向量;ud、uq∈R2分别为电机d轴和q轴的定子电压向量;Ld、Lq∈R2×2分别为d轴和q轴的定子电感矩阵;Rs∈R2×2为定子电阻矩阵;np∈R2×2为电机磁极对数矩阵;Jm∈R2×2为电机转动惯量矩阵;Φ∈R2×2为电机转子永磁体产生的磁链矩阵。
2机器人控制方案
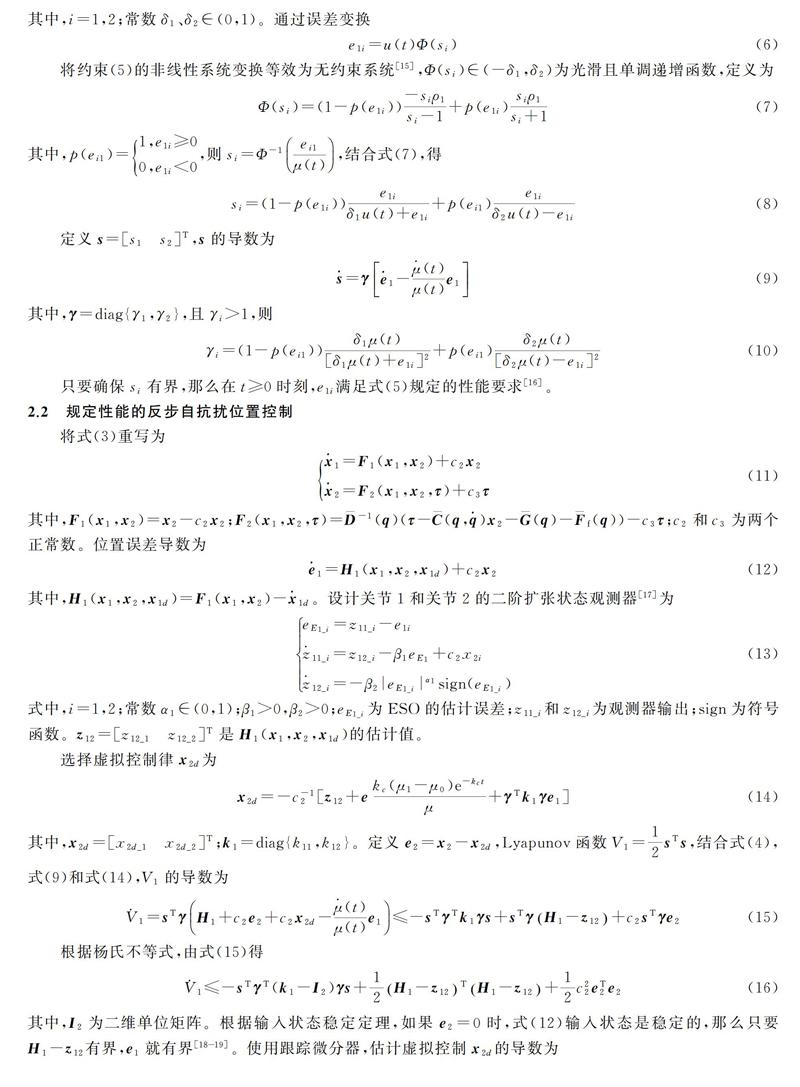
永磁同步电机采用矢量控制策略,二自由度关节机器人驱动系统控制框图如图1所示。
2.1规定性能函数
定义x1=q,x2=,期望位置x1d=[qd1qd2]T,机器人位置误差e1=x1-x1d。为严格规定e1的性能,选择性能函数[14]
其中,常数μ0>μ1,kc>0;μ(t)是值域内单调递减的光滑函数,且limt→∞μ(t)=μ1。规定e1i的范围为
其中,i=1,2;常数δ1、δ2∈(0,1)。通过误差变换
将约束(5)的非线性系统变换等效为无约束系统[15],Φ(si)∈(-δ1,δ2)为光滑且单调递增函数,定义为
其中,p(ei1)=1,e1i≥00,e1i<0,则si=Φ-1ei1μ(t),结合式(7),得
定义s=[s1s2]T,s的导数为
其中,γ=diag{γ1,γ2},且γi>1,则
只要确保si有界,那么在t≥0时刻,e1i满足式(5)规定的性能要求[16]。
2.2规定性能的反步自抗扰位置控制
将式(3)重写为
其中,F1(x1,x2)=x2-c2x2;F2(x1,x2,τ)=-1(q)(τ-(q,)x2-(q)-f(q))-c3τ;c2和c3为两个正常数。位置误差导数为
其中,H1(x1,x2,x1d)=F1(x1,x2)-1d。设计关节1和关节2的二阶扩张状态观测器[17]为
式中,i=1,2;常数α1∈(0,1);β1>0,β2>0;eE1_i为ESO的估计误差;z11_i和z12_i为观测器输出;sign为符号函数。z12=[z12_1z12_2]T是H1(x1,x2,x1d)的估计值。
选择虚拟控制律x2d为
其中,x2d=[x2d_1x2d_2]T;k1=diag{k11,k12}。定义e2=x2-x2d,Lyapunov函数V1=12sTs,结合式(4),式(9)和式(14),V1的导数为
根据杨氏不等式,由式(15)得
其中,I2为二维单位矩阵。根据输入状态稳定定理,如果e2=0时,式(12)输入状态是稳定的,那么只要H1-z12有界,e1就有界[18-19]。使用跟踪微分器,估计虚拟控制x2d的导数为
其中,v1i和v2i为跟踪微分器的状态变量,i=1,2;常数λ>0;α∈(0,1)是待设计参数;v2=[v21v22]T是2d的估計值。对e2进行微分可得
设计二阶扩张状态观测器,估计F2(x1,x2,τ)的值为
式中,i=1,2;常数α2∈(0,1);β3>0,β4>0;eE2_i为ESO的估计误差;z21_i和z22_i为观测器输出;z22=[z22_1z22_2]T是F2(x1,x2,τ)的估计值。设计控制器为
其中,k2=diag{k21,k22}。定义Δτ=τ-τc,选择Lyapunov函数为
将式(21)结合式(16)和式(20),可得V2的导数为
由于式(18)输入状态稳定,只要H1-z12,F2-z22,v2-2d有界,那么e2有界。令ESO和TD的总误差为
其中,ε=[ε1ε2]T。通过选择合适的ESO和TD参数,可以使总误差充分小。则
常数η1=2min(k11-1)γ21,(k12-1)γ22,k21-1-c22+c232,k22-1-c22+c232,ζ=12ΔτTΔτ+12εTε。那么,由式(24)可得
选择参数满足k11>1,k12>1,k21>1+c22+c232,k22>1+c22+c232,由式(22)和式(25)得s和e2是一致有界的,e1i可以满足规定性能要求。
2.3反步电流环控制
隐极PMSM期望d轴电流idc=0,利用电机q轴电流与电磁转矩的映射关系,得到期望电流为
设计电流控制器,取电流跟踪误差为
结合式(3),对电流跟踪误差求导得
取d轴电流控制器为
其中,k3=diag{k31,k32}>0,选取Lyapunov函数V3=12eTded,虚拟控制器udc代替式(28)中的ud,得到3=eTdd=-eTdk3ed。
取q轴电流控制器为
式中,矩阵k4=diag{k41,k42}>0,取Lyapunov函数V4=V3+12eTqeq,uqc代替式(28)中的uq,得
2.4稳定性证明
取整个系统Lyapunov函数V=V2+V4,由式(24)和式(31)分析可知
其中,η2=2min12η1,k31,k32,k41,k42,根据式(32)和V的定义可知,s、e2、ed、eq一致有界,输入稳定性定理可知e1有界,期望位置x1d有界,由式(20)得τc有界,则闭环系统中所有信号都有界。只要ESO和TD设计参数恰当,就能实现控制系统渐近稳定到原点邻域内,且该邻域的大小与控制器参数设计有关[20]。
3仿真结果
本研究采用Matlab/Simulink对控制方案进行仿真,传动比矩阵η=diag{0.01,0.01},PMSM参数Φ=diag{0.29,0.29}Wb,Ld=Lq=diag{0.003,0.003}H,Rs=diag{0.93,0.93}Ω,np=diag{4,4},Jm=diag{0.003,0.003}(kg·m2)。位置控制器k1=diag{7,8},k2=diag{200,150},c2=c3=1。扩张状态观测器参数β1=100,β2=800,β3=10,β4=20,α1=0.7,α2=0.5;跟踪微分器参数α=0.9,λ=5;性能函数μ0=1,μ1=0.1,kc=3,δ1=δ2=0.7;电流控制器参数k3=k4=diag{5 000,5 000}。机器人参数[21]为
D(q)=0.324+0.108cos q20.04+0.54cos q20.04+0.54cos q20.04, Ff()=[1.510.32]TG(q)=0.58gcos q1+0.135cos(q1+q2)0.135cos(q1+q2), C(q,)=-0.0542sin q2-0.054(1+2)sin q20.0541sin q20
选择期望位置曲线qd1=0.9sin1.1t,qd2=sin t,在控制器参数相同的情况下,对比反步自抗扰控制在规定性能和无规定性能的控制效果,在t=1 s时,对关节2机器人输入力矩τL突加0.4(N·m)扰动,而当t=2 s时,撤去扰动。关节1位置跟踪曲线如图2所示,关节2位置跟踪曲线如图3所示。
由图2和图3可知,机器人在连续运动状态下突加负载扰动,两种控制方法都能保持机器人的运动状态,实现有效的轨迹跟踪,规定性能的反步自抗扰控制具有更好的跟踪性能。关节1位置跟踪误差如图4所示,关节2位置跟踪误差如图5所示,关节1电机电磁转矩如图6所示,关节2电机电磁转矩如图7所示。
由图4和图5可以看出,采用规定性能控制,关节1位置误差最终收敛到±5×10-6rad,关节2位置误差收敛到±4×10-6rad,相较于无规定性能控制,控制精度更高,收敛速度更快,有较强抗干扰能力;由图6和图7可以看出,突加负载扰动的情况下,转矩脉动较小。
4结束语
本文以永磁同步电机驱动的二自由度刚性关节机器人为研究对象,提出规定性能的反步自抗扰位置控制。考虑机器人本体和电机的动态特性,建立PMSM驱动的二自由度刚性关节机器人模型,使用PMSM矢量控制策略,设计规定性能的反步自抗扰位置控制器和反步电流控制器,自抗扰技术不需要精确的机器人动力学模型,避免了传统反步法中虚拟信号反复求导出现的“计算爆炸”,提高了机器人的跟踪精度和速度。仿真结果表明,本文提出的规定性能的反步自抗扰控制具有良好的动态和稳态性能,对负载扰动有一定的抗干扰能力,具有一定的应用价值。
参考文献:
[1]Ahmadi S M, Fateh M M. Robust control of electrically driven robots using adaptive uncertainty estimation[J]. Computers and Electrical Engineering, 2016, 56: 674-687.
[2]Zhao B K, Yu H S, Yu J P, et al. Port-controlled hamiltonian and sliding mode control of gantry robot based on induction motor drives[J]. IEEE Access, 2018, 6: 43840-43849.
[3]Ming-Chih Chien, An-Chyau Huang. Adaptive control for flexible-joint electrically driven robot with time-varying uncertainties[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 1032-1038.
[4]Wei-lung Mao, Suprapto. Indirect fuzzy contour tracking for X-Y PMSM actuated motion system applications[J]. IET Electric Power Applications, 2018, 12(1): 12-24.
[5]Good M C, Sweet L M, Strobel K L. Dynamic models for control system design of integrated robot and drive systems[J]. Journal of Dynamic Systems Measurement and Control, 1985, 107(1): 53-59.
[6]Guo Q, Zhang Y, Celler B G, et al. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint[J]. IEEE transactions on Neural Networks and Learning Systems, 2019, 13(12): 3572-3583.
[7]Farrell J A, Polycarpou M, Sharma M, et al. Command filtered backstepping[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1391-1395.
[8]Pan Y P, Wang H M, Li X, et al. Adaptive command-filtered backstepping control of robot arms with compliant actuators[J]. IEEE Transactions on Control Systems Technology, 2018, 26(3): 1-8.
[9]韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2008.
[10]Bechlioulis C P, Rovithakis G A. Robust adaptive control of feedback linearizable mimo nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008, 53(9): 2090-2099.
[11]布魯诺·西西里安诺. 机器人学: 建模、规划与控制[M]. 西安: 西安交通大学出版社, 2015.
[12]于海生, 赵克友, 郭雷, 等. 基于端口受控哈密顿方法的PMSM最大转矩/电流控制[J]. 中国电机工程学报, 2006, 26(8): 82-87.
[13]Sun X F, Yu H S, Yu J P, et al. Design and implementation of a novel adaptive backstepping control scheme for a PMSM with unknown load torque[J]. IET Electric Power Applications, 2019, 13(4): 445-455.
[14]Shi W X, Wang D W, Li B Q. Indirect adaptive fuzzy prescribed performance control of feedback linearisable MIMO non-linear systems with unknown control direction[J]. IET Control Theory & Applications, 2017, 11(7): 953-961.
[15]Liu Z J, Liu J K. Boundary Control of a Flexible Robotic Manipulator with Output Constraints[J]. Asian Journal of Control, 2017, 19(1): 332-345.
[16]程春華, 胡云安, 吴进华. 非仿射纯反馈非线性系统的自抗扰控制[J]. 自动化学报, 2014, 40(7): 266-274.
[17]张超, 朱纪洪, 高亚奎. 自抗扰控制器的阶次与参数的选取[J]. 控制理论与应用, 2016, 31(11): 1480-1485.
[18]Cheng C H, Di Y Z, Xu J S, et al. Advanced backstepping control based on ADR for non-affine non-strict feedback nonlinear systems[J]. Automatika, 2018, 59(2): 220-230.
[19]Shao X L, Wang H L. Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO[J]. ISA Transactions, 2015, 57: 10-22.
[20]Yang Y, Tan J, Yue D. Prescribed Performance Control of One-DOF Link Manipulator with Uncertainties and Input Saturation Constraint[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 148-157.
[21]Sun W W, Wu Y, Wang L P. Trajectory tracking of constrained robotic systems via a hybrid control strategy[J]. Neurocomputing, 2018, 330: 188-195.
基金项目: 国家自然科学基金资助项目(61573203)
作者简介: 薛晔(1995-),女,山东淄博人,硕士研究生,主要研究方向为电机驱动与机器人控制。
通信作者: 于海生(1963-),男,博士,教授,博士生导师,主要研究方向为电能变换与电机系统控制。Email:yu.hs@163.com
Backstepping Active Disturbance Rejection Control of Robot Driven by PMSM with Prescribed Performance
XUE Ye, YU Haisheng, WU Herong
(School of Automation, Qingdao University, Qingdao 266071, China)
Abstract:In order to improve the tracking accuracy and anti-disturbance ability of the robot, this paper takes the two degree of freedom rigid joint robot driven by permanent magnet synchronous motor (PMSM) as the research object, and puts forward the backstepping active disturbance rejection position control with prescribed performance. This method, combined backstepping with active disturbance rejection technology, compensates uncertain dynamic and disturbance by extended states observers (ESO) and uses track differentiator (TD) instead of derivative of virtual control signal, eliminates “calculation explosion” caused by repeated differentiation of nonlinear function. Prescribed performance function is designed to improve speed and accuracy of position tracking. And the backstepping current controller is designed based on the motor vector control strategy. Through the input-to-state stability theory, it is proved that the tracking error can be gradually converged into arbitrarily small neighborhood of the origin. The simulation results show that the backstepping active disturbance rejection control proposed in this paper, compared with unprescribed performance control, has higher control accuracy, faster convergence speed, better dynamic and steady-state performance. This control method has high position tracking accuracy and strong anti-interference ability.
Key words:robot joint driven system; PMSM; prescribed performance; backstepping control; ADRC