PMSM驱动的柔性关节机器人命令滤波模糊控制
2020-05-20 15:05王博于金鹏于海生
青岛大学学报(工程技术版) 2020年2期
关键词:永磁同步电机
王博 于金鹏 于海生

摘要:针对永磁同步电机驱动的柔性关节机器人的位置跟踪控制问题,本文采用反步法进行控制,并基于永磁同步电机和柔性关节机器人构建的新系统,通过永磁同步电机的电压,实现机器人的位置跟踪。同时,结合模糊自适应控制方法,利用命令滤波技术,解决了传统反步法中存在的“计算复杂性”问题。为验证本文控制算法的有效性,利用Matlab进行仿真实验。实验结果表明,机器人的位置信号可以快速跟踪给定的期望信号,且跟踪误差小,跟踪效果良好,控制精度高,说明本文所设计的控制方法,對永磁同步电机驱动的柔性关节机器人系统具有良好的控制效果。该研究能够有效实现对柔性关节机器人的位置跟踪控制,具有较好的应用前景。
关键词:模糊自适应控制; 命令滤波反步控制; 柔性关节机器人; 永磁同步电机
中图分类号: TP242.2; TP273+.4; TM341文献标识码: A
文章编号: 1006-9798(2020)02-0083-08; DOI: 10.13306/j.1006-9798.2020.02.013
目前,机器人控制在国内外引起了越来越多的关注。机器人在各个领域发展迅速,在抢灾救险、娱乐及军事等许多方面都具有非常好的应用前景[1-3]。其中,柔性关节机器人(flexible joint robot,FJR)因为具有高负载、质量轻,低功耗等特点被广泛应用,对其控制方法的研究成为焦点问题。以往针对FJR的控制方法[4-6]大多只考虑其本身的动力学模型,通过控制驱动电机的输出力矩,实现机器人的位置跟踪,忽略了其驱动电机的控制问题,导致工程实践中控制效果不佳。为了提高FJR系统的控制效果,应同时考虑其驱动电机系统的控制稳定性。近年来,随着电机相关理论及控制技术日趋成熟,永磁同步电机(permanent magnet synchronous motor,PMSM)以其功率因数高、结构简单、使用周期长及维护简单等优点取得越来越广泛的应用[7],PMSM的自身特性满足FJR驱动控制的需要,因此PMSM可以被用作FJR的驱动电机。FJR系统与PMSM系统都是非线性系统,具有强耦合、高阶次等特性,其控制器设计过程十分复杂。针对此类系统,学者们提出了反步控制[8-9]、奇异摄动控制[10-11]和滑模控制[12-13]等控制方法。赵丹青[14]使用反步法对FJR进行控制,但传统反步法在应用过程中仍然存在无法处理系统中未知的非线性函数项及虚拟控制信号重复求导引起的“计算复杂性”问题这两个缺点,限制了传统反步法应用的范围。为了克服传统反步法中的第1个缺点,于金鹏等人[15]提出了一种基于模糊逻辑系统(fuzzy logic system,FLS)逼近的自适应反步法,来处理非线性系统中存在未知非线性函数的问题;针对第2个缺点,Tong S C等人[16]将模糊自适应反步技术与动态面技术相结合,引入一阶滤波器,解决了“计算复杂性”问题,然而在应用过程中滤波器会产生滤波误差,导致系统的控制精度下降。为了解决上述问题,可在高阶非线性系统控制中引入命令滤波技术,克服了动态面技术的缺陷,对滤波器产生的滤波误差进行补偿,控制效果更加理想[17]。基于此,本文提出了一种基于PMSM驱动FJR的命令滤波模糊自适应反步控制方法,并采用Matlab进行仿真实验。仿真结果证明本文提出的控制方法,对永磁同步电机驱动的柔性关节机器人系统具有良好的控制效果。
1PMSM驱动的FJR的数学模型
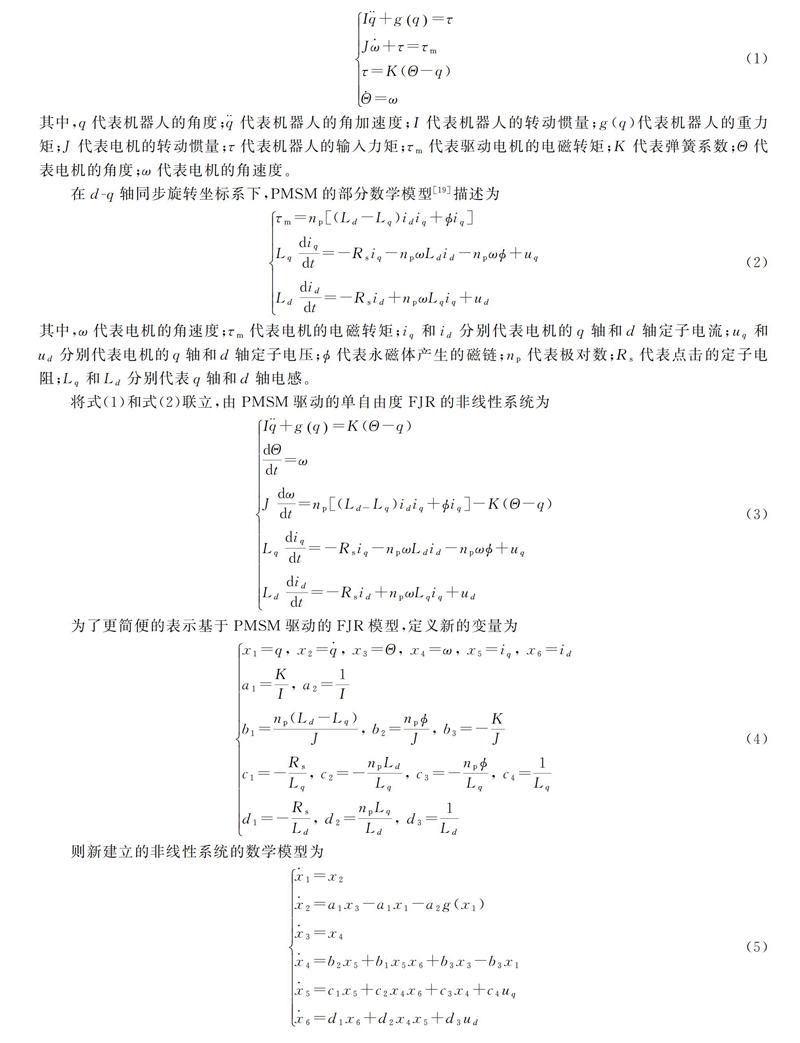
单自由度FJR的动力学模型[18]为
其中,q代表机器人的角度;代表机器人的角加速度;I代表机器人的转动惯量;g(q)代表机器人的重力矩;J代表电机的转动惯量;τ代表机器人的输入力矩;τm代表驱动电机的电磁转矩;K代表弹簧系数;Θ代表电机的角度;ω代表电机的角速度。
在d-q轴同步旋转坐标系下,PMSM的部分数学模型[19]描述为
其中,ω代表电机的角速度;τm代表电机的电磁转矩;iq和id分别代表电机的q轴和d轴定子电流;uq和ud分别代表电机的q轴和d轴定子电压;代表永磁体产生的磁链;np代表极对数;Rs代表点击的定子电阻;Lq和Ld分别代表q轴和d轴电感。
将式(1)和式(2)联立,由PMSM驱动的单自由度FJR的非线性系统为
为了更简便的表示基于PMSM驱动的FJR模型,定义新的变量为
则新建立的非线性系统的数学模型为
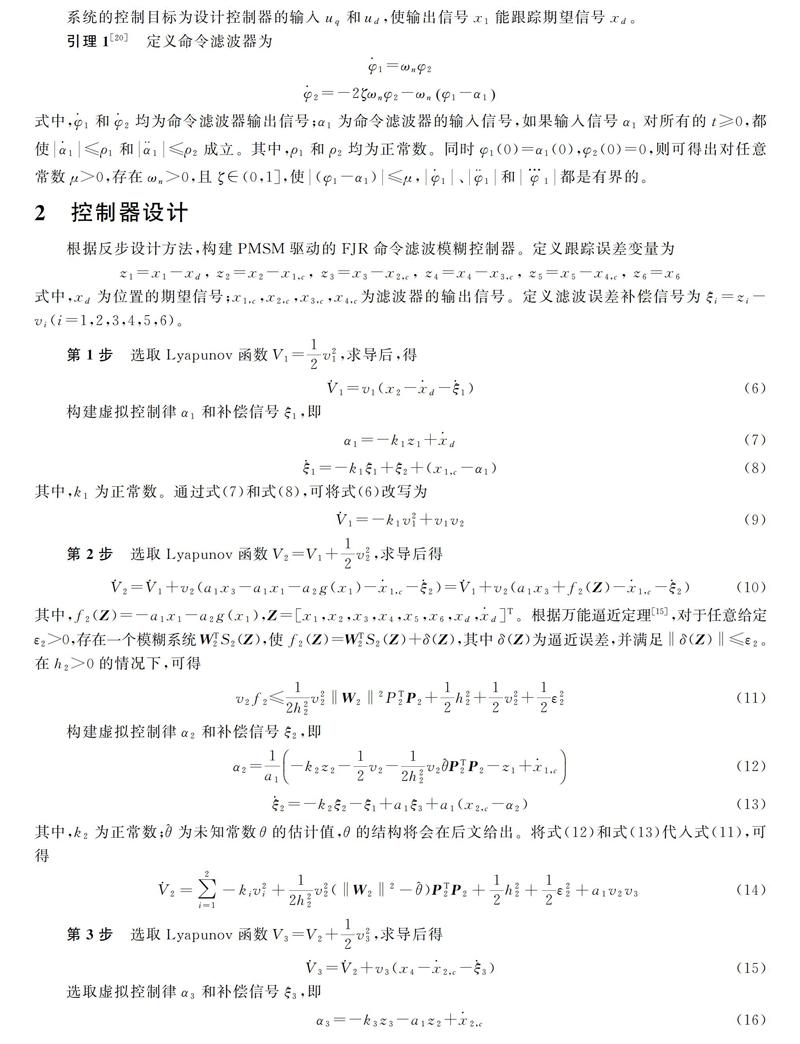
系统的控制目标为设计控制器的输入uq和ud,使输出信号x1能跟踪期望信号xd。
引理1[20]定义命令滤波器为
式中,1和2均为命令滤波器输出信号;α1为命令滤波器的输入信号,如果输入信号α1对所有的t≥0,都使1≤ρ1和1≤ρ2成立。其中,ρ1和ρ2均为正常数。同时φ1(0)=α1(0),φ2(0)=0,则可得出对任意常数μ>0,存在ωn>0,且ζ∈(0,1],使(φ1-α1)≤μ,1、1和φ···1都是有界的。
2控制器设计
根据反步设计方法,构建PMSM驱动的FJR命令滤波模糊控制器。定义跟踪误差变量为
式中,xd为位置的期望信号;x1,c,x2,c,x3,c,x4,c为滤波器的输出信号。定义滤波误差补偿信号为ξi=zi-vi(i=1,2,3,4,5,6)。
第1步选取Lyapunov函数V1=12v21,求导后,得
构建虚拟控制律α1和补偿信号ξ1,即
其中,k1为正常数。通过式(7)和式(8),可将式(6)改写为
第2步选取Lyapunov函数V2=V1+12v22,求导后得
其中,f2(Z)=-a1x1-a2g(x1),Z=[x1,x2,x3,x4,x5,x6,xd,d]T。根据万能逼近定理[15],对于任意给定ε2>0,存在一个模糊系统WT2S2(Z),使f2(Z)=WT2S2(Z)+δ(Z),其中δ(Z)为逼近误差,并满足‖δ(Z)‖≤ε2。在h2>0的情况下,可得
构建虚拟控制律α2和补偿信号ξ2,即
其中,k2为正常数;为未知常数θ的估计值,θ的结构将会在后文给出。将式(12)和式(13)代入式(11),可得
第3步选取Lyapunov函数V3=V2+12v23,求导后得
选取虚拟控制律α3和补偿信号ξ3,即
将式(16)和式(17)代入式(15),有
第4步选取Lyapunov函数V4=V3+12v24,求導后得
其中,f4(Z)=b1x5x6-b3x3+b3x1。同理,运用模糊逻辑系统逼近此非线性函数,对于任意给定的ε4>0,在h4>0的情况下,可得
选取虚拟控制律α4和补偿信号ξ4,即
将式(21)和式(22)代入式(20),可得
第5步构建Lyapunov函数V5=V4+12v25,求导后得
其中,f5(Z)=c1x5+c2x4x6+c3x4,任意给定的ε5>0,在h5>0的情况下,可得
选取真实控制律uq和补偿信号ξ5,即
将式(26)和式(27)代入式(25),有
第6步构建Lyapunov函数V6=V5+12v26,求导后得
其中,f6(Z)=d1x6+d2x4x5,对于任意给定的ε6>0,在h6>0的情况下,可得
选取真实控制律ud和补偿信号ξ6,即
将式(31)和式(32)代入式(30),得
设计θ=max‖W2‖2,‖W4‖2,‖W5‖2,‖W6‖2。其中,是θ的估计值。定义估计误差为
=θ-(34)
为了证明系统的稳定性,构建Lyapunov函数为
求导后得
选取自适应律为
3稳定性分析
将式(37)代入式(36),可得
由杨氏不等式可知
则式(38)可转化为
其中,a=min{2k1,2k2,2k3,2k4,2k5,2k6,m1};b=12ε22+12h22+∑6i=412h2i+12ε2i+m12r1θ2。
由式(40)可得
式(41)表明,vi(i=1,2,3,4,5,6)属于紧集Ω={(vi,)V≤V(t0)+a/b,t≥t0},故闭环系统中的所有信号都是有界的,则limt→∞vi≤2b/a,其中i=1,2,3,4,5,6。
由于zi=vi+ξi,要想证明误差zi是有界的,必须证明命令滤波中的补偿信号ξi是有界的。
选取Lyapunov函数为
求导后得
其中,i=1,2,3,4,5,6。
由上述证明可知,vi和ξi都是有界的,则跟踪误差zi是有界的,即
其中,i=1,2,3,4,5,6。
当选定参数ki和m1后,选取足够大的r1和足够小的μ,hi和εi,可以保证系统的跟踪误差足够小。
4仿真结果分析
为验证本文的控制算法对PMSM驱动的FJR系统的有效性,利用Matlab进行仿真实验。其中,机器人的转动惯量为I=0.2 kg·m2,机器人的质量m=1 kg,重力加速度为g=9.8 m/s2,起始时刻q=0,机器人的重力矩为g(q)=-mgsin(q),弹簧系数K=10 000。
PMSM的参数:J=0.003 79 kg·m2,Rs=0.68 Ω,np=3,Ld=0.003 15 H,Lq=0.002 85 H,=0.124 5 Wb。
控制器的参数:k1=800,k2=200,k3=1,k4=500,k5=100,m1=0.5,r1=0.07,h2=h4=h5=h6=100。
命令滤波器的参数:ζ=0.7,ωn=3 000;期望的跟踪信号:xd=sin(t);选择模糊集如下:
μF1i=exp-(x+5)22, μF2i=exp-(x+4)22, μF3i=exp-(x+3)22, μF4i=exp-(x+2)22
μF5i=exp-(x+1)22, μF6i=exp-(x-0)22, μF7i=exp-(x-1)22, μF8i=exp-(x-2)22
μF9i=exp-(x-3)22, μF10i=exp-(x-4)22, μF11i=exp-(x-5)22
x1和xd的波形对比如图1所示,跟踪误差z1的波形如图2所示,q轴电压随时间变化曲线如图3所示,d轴电压随时间变化曲线如图4所示。
由图1~图4可以看出,本文设计的控制方法中,机器人的位置信号可以快速跟踪给定的期望信号,并且跟踪误差小,跟踪效果良好,响应速度快,控制精度高。
5结束语
本文针对PMSM驱动的FJR系统,将FJR的动力学模型与PMSM的数学模型相结合,建立新的非线性系统。同时,采用命令滤波技术,结合模糊自适应反步控制方法,通过PMSM的输入电压,实现了对FJR的位置控制。同时,利用模糊自适应技术处理了新系统中的不确定非线性函数,将命令滤波技术与反步法结合应用于新系统中,解决了传统反步法中存在的“计算复杂性问题”;引入滤波误差补偿机制,对滤波器产生的误差进行补偿,降低滤波误差在控制过程中造成的影响。仿真结果表明,本文提出的控制方法能够有效的实现对FJR的位置跟踪控制。
参考文献:
[1]胡亚强, 于金鹏, 赵林, 等. 基于命令滤波技术的水下机器人位置跟踪控制[J]. 青岛大学学报: 工程技术版, 2019, 34(1): 99-104.
[2]刘自文, 赵亮, 于鹏, 等. 柔性外骨骼手的抓取力控制方法[J]. 机器人, 2019, 41(4): 483-492.
[3]邹明峻, 于金鹏, 于海生, 等. 全肘式四足仿生机器人爬台阶步态研究[J]. 电气传动, 2019, 49(11): 64-69.
[4]何栋炜, 周结华, 高培, 等. 机器人自适应非光滑轨迹跟踪控制[J]. 控制工程, 2018, 25(9): 1666-1670.
[5]Haouari F, Nourdine B, Boucherit M S, et al. A Coefficient diagram method controller with backstepping methodology for robotic manipulators[J]. Journal of Electrical Engineering, 2015, 66(5): 270-276.
[6]陈志勇, 李振汉. 柔性基和柔性关节空间机器人双重自适应控制[J]. 华中科技大学学报: 自然科学版, 2019, 47(1): 32-38.
[7]刘加勋, 王佐勋, 雷腾飞, 等. 永磁同步电机有限时间混沌同步控制[J]. 微特电机, 2019, 47(8): 45-47.
[8]Yu J P, Shi P, Dong W J, et al. Observer and command filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5962-5970.
[9]王雪竹, 李洪谊, 王越超, 等. 柔性关节机器人高精度自适应反步法控制[J]. 信息与控制, 2016, 45(1): 1-7.
[10]刘华山, 金元林, 程新, 等. 力矩输入有界的FJR轨迹跟踪控制[J]. 控制理论与应用, 2019, 36(6): 983-992.
[11]刘福才, 刘林, 徐智颖. 柔性关节空间机械臂奇异摄动模糊PID控制仿真研究[J]. 高技术通讯, 2019, 29(7): 661-667.
[12]赵春刚, 张爱华, 王明红, 等. 多关节机器人事件驱动神经网络滑模控制[J]. 制造业自动化, 2018, 40(8): 135-139.
[13]庄未, 刘晓平. 多连杆柔性关节机械臂的神经滑模控制[J]. 系统仿真学报, 2011, 23(10): 2098-2102.
[14]赵丹青. 机器人的柔性关节机械手控制研究[J]. 计算机仿真, 2011, 28(2): 244-247.
[15]于金鹏, 陈兵, 于海生, 等. 基于模糊自适应反步法的永磁同步电机位置跟踪控制[J]. 控制与决策, 2010, 25(10): 1547-1551.
[16]Tong S C, Sui S, Li Y M. Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained[J]. IEEE Transactions on Fuzzy Systems, 2015, 23(4): 729-742.
[17]于金鹏, 于海生, 林崇. 考虑铁损的异步电动机模糊自适应命令滤波反步控制[J]. 控制与决策, 2016, 31(12): 2189-2194.
[18]Huang Y, Ran C, Li J, et al. Integrated rotary compliant joint and its impedance-based controller for single-joint pressing massage robot[C]∥2012 IEEE International Conference on Robotics and Biomimetics (ROBIO). Guangzhou, China: IEEE, 2012: 1962-1967.
[19]杨雪婷, 马玉梅, 于金鹏, 等. 基于有限时间永磁同步电机命令滤波位置跟踪控制[J]. 青岛大学学报: 工程技术版, 2017, 32(3): 104-108, 113.
[20]程帅, 于金鹏, 于海生, 等. 考虑铁损的永磁同步电机随机命令滤波控制[J]. 微电机, 2019, 52(7): 61-66.
Command Filtered Fuzzy Control for Flexible Joint Robot Driven by Permanent Magnet Synchronous Motor
WANG Bo, YU Jinpeng, YU Haisheng
(School of Automation, Qingdao University, Qingdao 266071, China)
Abstract:Aiming at the position tracking control of the flexible joint robot driven by permanent magnet synchronous motor, this paper adopts the backstepping and realizes the position tracking of the robot through the voltage of the permanent magnet synchronous motor based on the new system constructed by permanent magnet synchronous motor and flexible joint robot. At the same time, the problem of "computational complexity" in the traditional backstepping is solved by the command filtering technology combined with the adaptive fuzzy control method. The simulation experiment is carried out in Matlab to verify the effectiveness of the control algorithm in this paper. The experimental results show that the position signal of the robot can accurately track the desired signal. The method proposed in this paper has the advantages of small error, great tracking effect and excellent control accuracy. It shows that under the control method designed in this paper, the flexible joint robot system driven by PMSM has great control effect. The research can effectively realize the position tracking control of the flexible joint robot and has a good application prospect.
Key words:adaptive fuzzy control; command filtered backstepping control; flexible joint robot; permanent magnet synchronous motor
收稿日期: 2019-12-20; 修回日期: 2020-02-03
基金項目: 国家重点研发计划(2017YFB1303503);国家自然基金资助项目(61573204);泰山学者工程专项经费资助(TSQN20161026)
作者简介: 王博(1994- ),男,山东烟台人,硕士研究生,主要研究方向为机器人与电机控制。
通信作者: 于金鹏(1978- ),男,山东乳山人,教授,博士生导师,泰山学者,主要研究方向为电能变换与电机系统控制。 Email: yjp1109@126.com
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11