
海洋短排列多道反射地震数据观测系统重定义与沉放深度校正
2020-05-22 09:49张圣高金耀丁维凤沈中延刁云云
海洋学报 2020年3期
张圣,高金耀*,丁维凤,沈中延,刁云云
(1.自然资源部第二海洋研究所 海底科学重点实验室,浙江 杭州 310012)
1 引言
短排列多道地震勘探广泛应用于近海工程地质调查、油气平台的井场调查和相关海域的环境调查。与常规油气勘探中的长排列二维地震勘探相比,其具有灵活操作性和剖面高分辨率特点,调查成果能够有效识别浅薄地层、小断层等尺度较小的地质体和构造特征,可有效划分浅部地层的空间分布等[1-3]。在海底浅层地质灾害识别中,短排列多道地震勘探成果能够有效识别海底的浅部断裂、滑坡、浅层气泄漏等灾害性地质现象,为工程地质研究提供可靠的资料[4]。
海上多道地震勘探中,等浮拖缆的水下姿态对地震信号反射信息的有效接收至关重要,实际工作中一般通过水鸟来控制拖缆的姿态及位置。水鸟设备在海上地震勘探中非常重要,能有效控制接收拖缆的沉放深度、羽角、位置等信息,便于地震处理时确定各检波点的位置及姿态数据,为后续数据处理提供可靠的观测系统参数[5-7]。但近岸高分辨率多道地震勘探因勘探目的层的深度以及作业船只和作业海域环境等因素影响,一般采用24道短排列拖缆,为方便野外工作,接收拖缆上一般不安装水鸟,这给短排列接收拖缆的定位与定深带来不利,会造成拖缆不同接收道的实际位置及沉放深度无法控制,影响野外观测系统定义及静校正,给后续数据处理带来诸多困扰。
观测系统定义直接影响反射地震数据的采集和处理结果质量,尤其是数据处理中的共中心点(CMP)道集抽道运算。准确的观测系统设置不仅可以提高地震数据的分辨率,还可以有效提高数据成果的信噪比。无水鸟情况下,常规处理基于理想状态下的直线假设定义观测系统,该方法无法获得拖缆及检波点的实际位置信息,影响CMP抽道集运算及多次叠加次数计算。同时,在走航调查过程中,排列拖缆受勘探船拖曳力变化,以及海域洋流、海面涌浪与风浪等因素影响,接收缆沉放深度会不一致,且随着勘探船的航行不断变化,导致所记录的反射波旅行时间不遵循理论双曲线形态,单炮记录上的海底面反射同相轴扭曲,CMP道集反射同相轴无规律,导致后续的速度分析和叠加处理效果很差。
目前观测系统定义及拖缆沉放深度校正需要利用水鸟提供的位置和深度信息,对于无水鸟地震反射数据,尚没有可靠的处理方法。本文基于中国第30次南极科考在罗斯海维多利亚地盆地采集的24道短排列反射地震数据,分析研究无水鸟短排列多道反射地震观测系统的准确定义,以及拖缆沉放深度非一致造成不同接收道的深度校正问题。
南极罗斯海维多利亚地盆地位于西南极,科考海域在维多利亚地盆地北部的冰舌附近(图1)。野外地震数据采集为避免海上浮冰影响,采集高质量的反射数据,现场工作时选择海况较好,海流影响较小的天气海况下作业,同时为提高工作效率及保障水下仪器的安全,接收拖缆上未安装水鸟,拖缆尾端系上大浮球(图2),既可现场瞭望拖缆尾端,又可拉直接收拖缆,工作时“雪龙”船以5 kn的航速直线航行,减小拖缆水平弯曲,尽量保持调查船航迹与拖缆航迹一致。野外作业采集参数见表1。
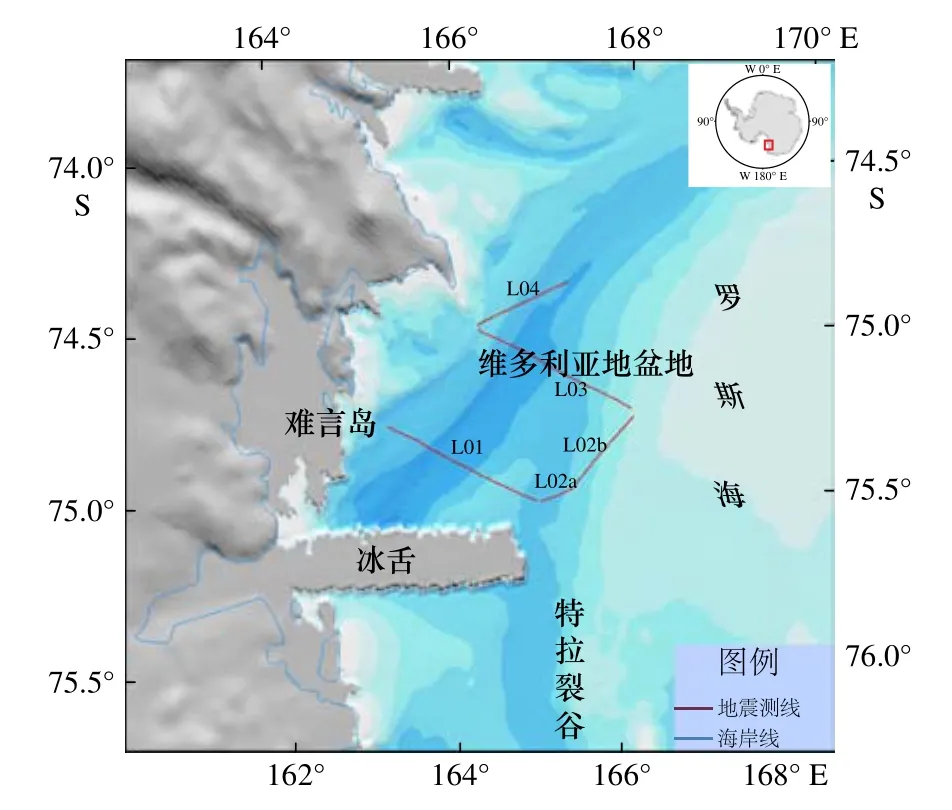
图1 南极罗斯海地震测线位置Fig.1 The location of seismic line in the Ross Sea
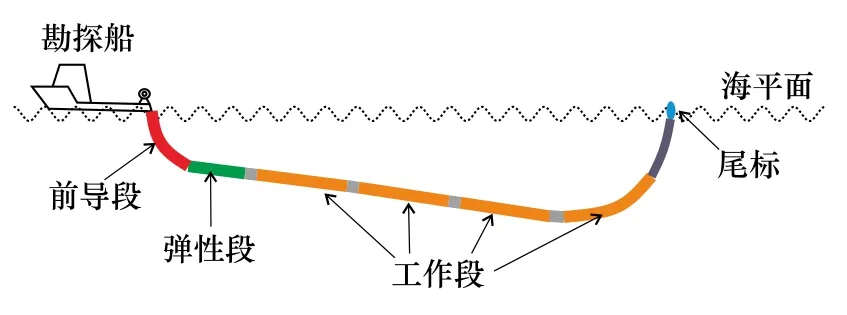
图2 海洋地震勘探拖缆姿态Fig.2 Towing cable state of marine seismic exploration
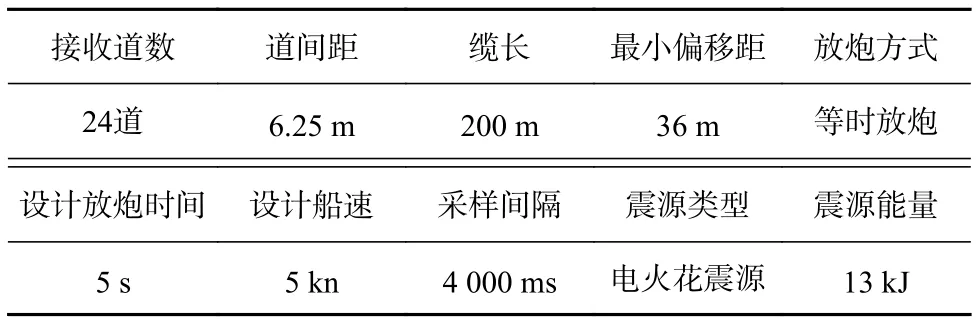
表1 海上地震勘探采集参数Table 1 Acquisition parameters for marine seismic exploration
2 野外观测系统定义
海上多道地震勘探中,接收拖缆的接收总道数和道间距固定不变,炮间距和最小偏移距一般由野外采集现场试验确定,数据处理时需要根据野外实际采集情况,首先定义好野外观测系统参数,重点确定整个排列的最小偏移距、炮间距以及各个接收道的准确位置坐标,最后计算准确的共反射点位置坐标。对于短排列接收拖缆,目前通常采用基于直线假设的常规观测系统简单定义方法,针对该方法的使用缺陷,将重点介绍基于实际航迹坐标准确定义观测系统的方法。
2.1 常规观测系统
无水鸟控制情况下,若采用直线假设方法,常规观测系统定义只需计算炮间距及最小偏移距参数且参数是恒定的,再计算各检波点与激发点的相对距离,最后获得各共中心点的相对距离。基于直线假设的常规观测系统(图3)可以简单计算出激发点与检波点相对直线距离。
海上多道地震的调查工作中,通过导航软件控制震源等时或等距激发,激发点坐标可以经过导航软件实时记录。南极位于高纬度地区,GPS没有差分信号且信号不稳定,定位精度受星态影响较大,无法做到严格的等距放炮,同时受浮冰等环境影响及“雪龙”船自身因素,无法严格控制船速不变,因此采用等时放炮,尽量控制船速在5 kn左右。利用导航数据文件,发现设定的等时放炮参数,实际记录文件显示并未完全等时,加上船速难以控制在恒定,造成实际炮间距并非直线假设中的等间隔放炮,如图4曲线所示。

图3 基于直线假设的常规观测系统Fig.3 Conventional geometry based on linear hypothesis
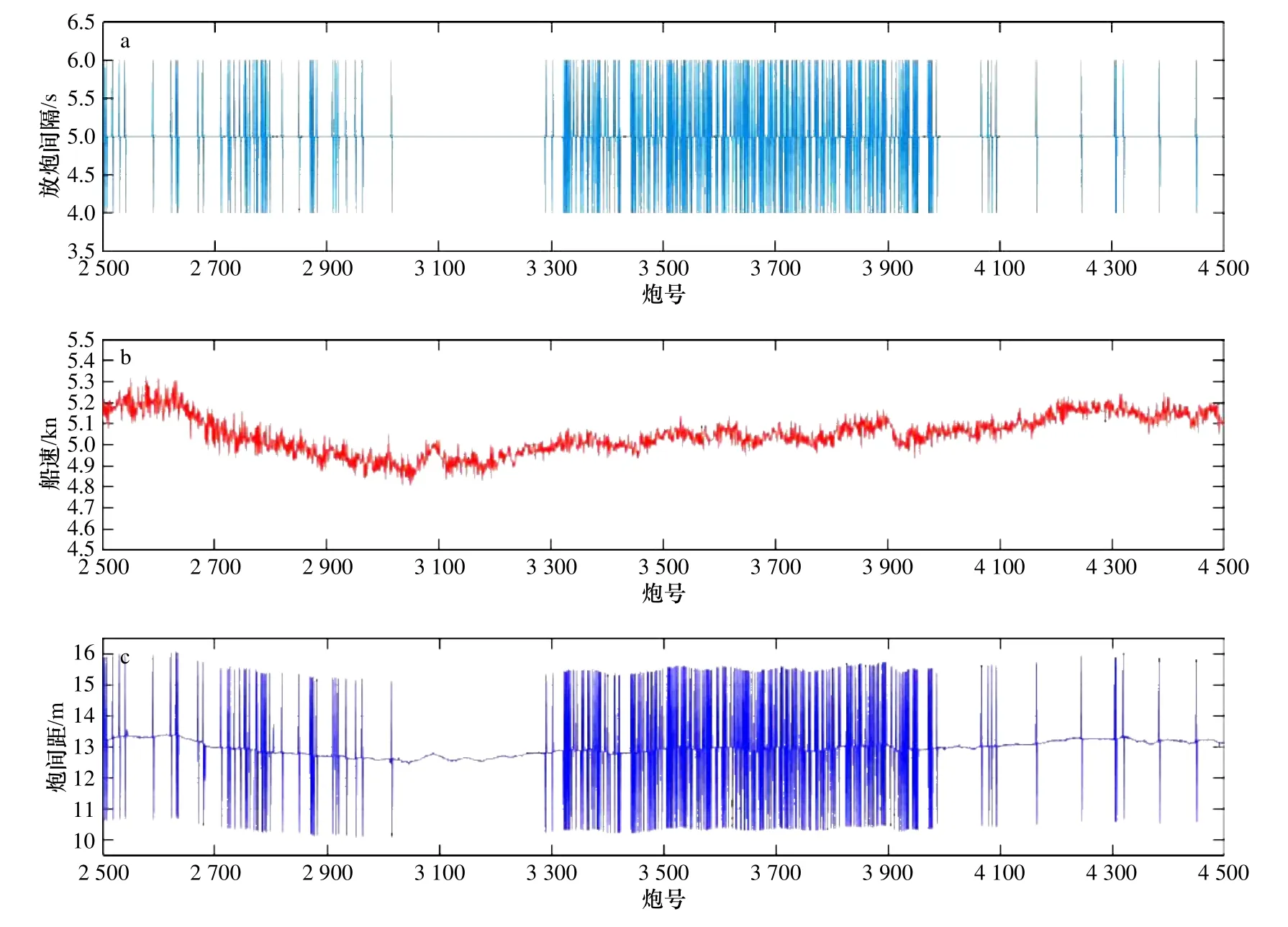
图4 放炮时间间隔(a)、船速(b)、炮间距(c)随激发点点号变化曲线Fig.4 Shot time interval (a), ship speed (b) and shot interval (c) curve of source point number
基于直线假设时,假设船以5 kn速度匀速航行,放炮时间导航软件控制在5 s,计算的炮间距为12.86 m。从图4中可以看出,实际放炮时间导航软件大部分控制在5 s,但由于地震采集系统涉及多个子系统,信号传输存在时间延迟,以及受时间记录的精度影响,导致放炮时间存图中所示的部分4 s和6 s间隔激发。图中绘制的实际跑航船速也并非恒定的5 kn,而是在4.8~5.3 kn范围变化。图4c中的曲线显示炮间距在13 m左右浮动,放炮间隔偏差较大,最小值只有10.09 m,最大值16.06 m,存在突跳偏差。
2.2 基于导航定位数据重定义观测系统
为避免常规观测系统的误差,考虑到拖缆较短、船速5 kn、海流等外界因素对拖缆水平位置影响较小,可以利用导航数据以及GPS天线与震源的相对空间关系,计算激发点的实际轨迹坐标,模拟拖缆在船尾的拖行轨迹,并获得检波点与激发点间的相对空间位置关系,最后可计算出检波点的实际坐标值。
为有效模拟拖缆在船尾的拖行轨迹,需要首先计算各检波点同激发点之间的空间位置关系。通过研究分析,本文采用反距离比线性插值算法计算检波点坐标。该方法基于Tobler定理,根据空间自相关性原理,利用距离权值,近距离的邻近点,对计算点的相关属性贡献值越大;相反,远距离的邻近点,对计算点的属性值贡献越小[8-9]。利用该方法原理,可以有效计算各检波点的空间坐标。
2.2.1 计算检波点与激发点间相对位置关系
海上多道地震勘探时,一般会量取船载GPS天线与船尾震源间的相对位置。有了震源点相对于GPS天线的位置,利用导航定位信息,可以计算出激发点的实时坐标位置,再根据检波点与激发点的相对位置示意图(图5),可以利用下式计算出激发点与检波点的相对空间位置关系,
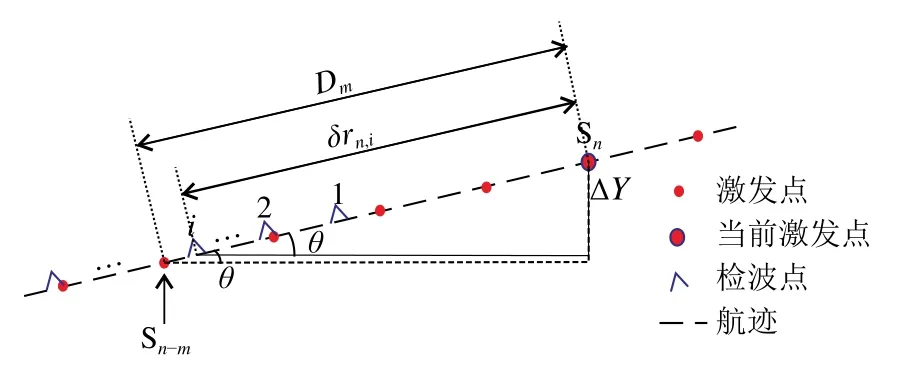
图5 检波点与激发点间空间位置关系Fig.5 Spatial position relationship between the receiving points and the shot points
式中,δrn,i是当前炮(第n炮)第i道的炮检距,可以通过直达波起跳时间确定;m表示离检波点最近的激发点与当前炮的间隔激发点数;θ表示第i道检波器与当前激发点的方位角; ΔS表示炮间距;Dm表示m炮间的距离,Dm=mΔS; ΔY表示m炮间Y方向的距离;Yn,Yn-m分别表示两炮的Y方向坐标,ΔY=Yn-Yn-m。
利用上面公式,可以计算出m和θ两个参数,并由此获得检波点相对于激发点的空间位置,给出检波点的平面坐标。
2.2.2 计算检波点坐标
通过式(1)和式(2),可以获得短排列接收缆随船拖行的空间形态与检波点相对方位,模拟的拖缆空间形态与方位同实际会存在一定误差,为减小误差,采用邻近点反距离比线性插值算法,利用多个激发点坐标计算单个检波点的坐标,利用多点的距离权值插值计算待求点坐标。计算过程需要利用上面计算的空间方位信息,输入激发点轨迹,通过下式,可以算出检波点的实际平面坐标值[9],


式中,xrn,i,yrn,i表示检波点的坐标对;XSn-k,YSn-k表示参与计算的第n-k炮的激发点坐标对;δrn-k,i表示第n-k炮时第i道的炮检距。
将计算出的所有检波点和激发点坐标输入专业处理软件中,定义野外实际观测系统参数,抽取测线所有炮集的CMP道集,计算共反射点的叠加次数。
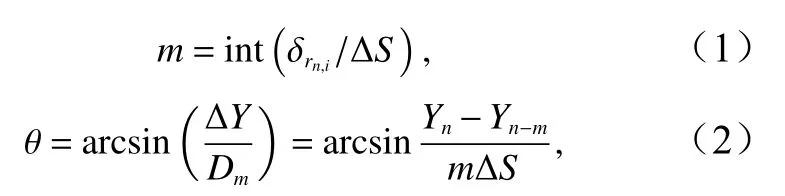
常规观测系统共反射点为直线关系,叠加次数为5~6次(图6),是基于理论假设,与海上实际跑航调查不符。基于导航数据重新定义的观测系统共反射点轨迹与航迹相符(图7),CMP叠加次数多为4~5次,随拖缆轨迹及炮间距变化。当炮间距变大时,叠加次数减小,出现部分4次叠加,更符合实际情况。
3 拖缆沉放深度校正
如何处理好因拖缆沉放深度的变化导致检波点不在同一深度平面上,可以参考陆地地震勘探中的静校正问题。如图8所示,对采集的反射地震数据,需要进行类似图中因拖缆变化而引起的检波器深度不一致校正问题[10]。
为完整考虑多道地震排列因激发震源及接收拖缆两者的深度变化,改正记录信号的反射形态突变,实际处理中,我们从共中心点道集和共炮检距道集记录以及水深改正[11]3个方面进行排列静校正处理,达到完全改正反射信号的旅行时误差,还原有效反射信号的理论时距曲线关系。
3.1 共中心点道集静校正
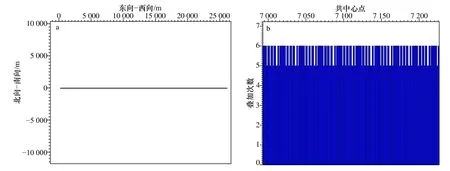
图6 基于直线假设定义的观测系统共反射点轨迹(a)与叠加次数(b)Fig.6 Common reflection point trajectory (a) and the stacking fold (b) of the geometry defined by linear hypothesis
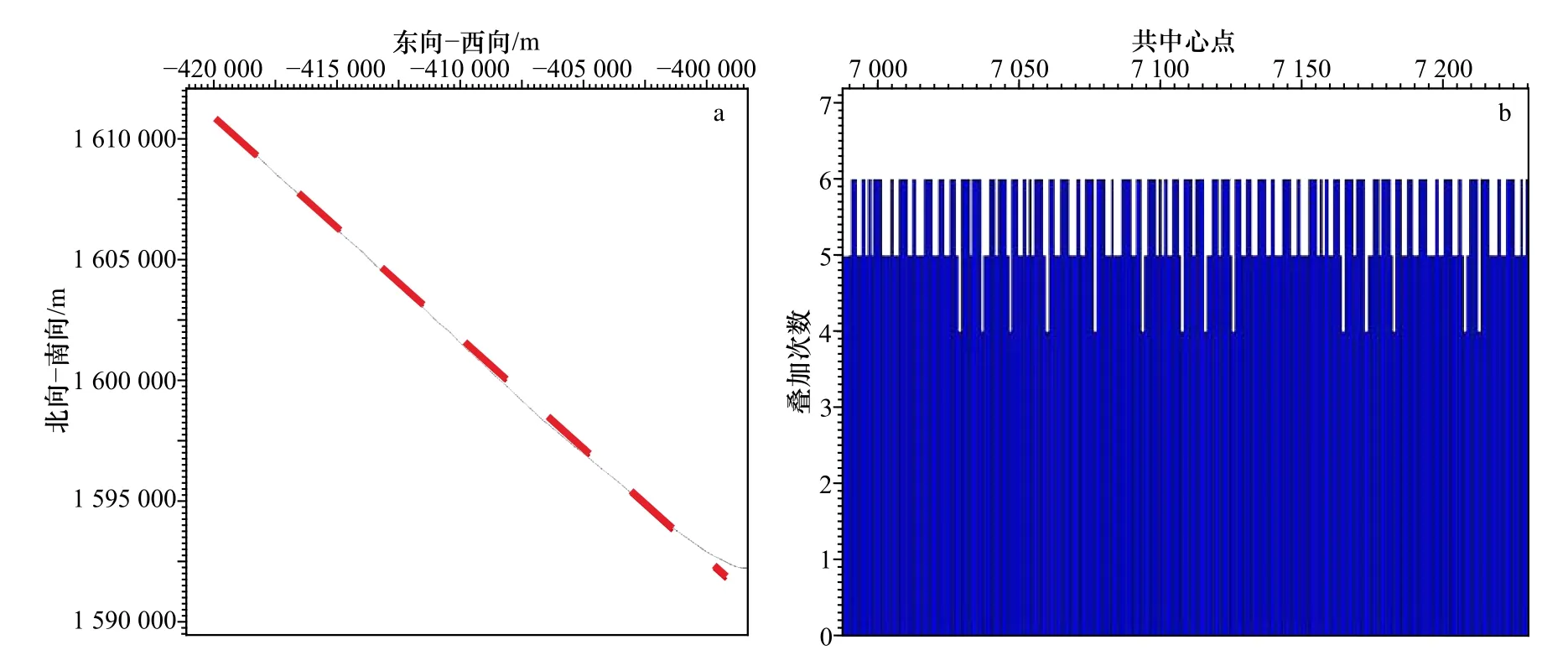
图7 基于导航数据定义的观测系统共反射点轨迹(a)与叠加次数(b)Fig.7 Common reflection point trajectory (a) and the stacking fold (b) of the geometry based on navigation data
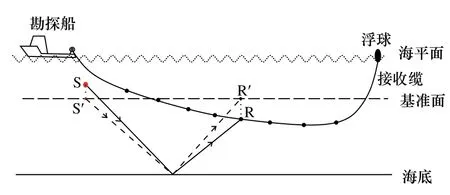
图8 海洋地震勘探基准面静校正Fig.8 Datum static correction of marine seismic exploration
将共中心点道集第一道的海底反射时间作为基准点,如图9所示,计算共中心点的理论时距曲线时间参数,并将其他所有道集的海底面反射校正到海底理论反射时间位置。利用式(5)和式(6)[10],校正所采集的多道地震数据,在式(5)中已考虑到地层倾角θ,因此,自动按倾斜地层进行校正。获得图10所示的对比结果。
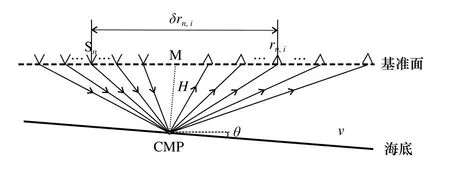
图9 海洋地震勘探CMP地震波传播示意图Fig.9 Schematic diagram of theoretical seismic wave propagation
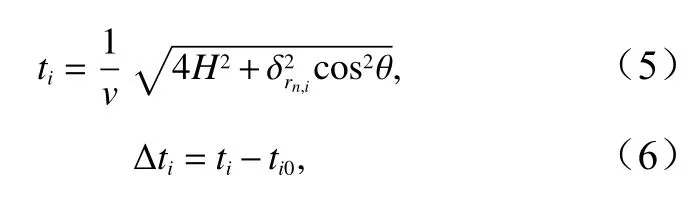
式中,ti、ti0、 Δti分别表示第n炮第i道检波点海底同相轴的理论双程旅行时、记录双程旅行时、静校正量;H表示当前共中心点水深值; δrn,i表示当前检波点炮检距;θ表示当前共中心点处地层倾角;v表示地震波在介质中的传播速度,采用当前水层的平均速度,根据实测或者公开的声速资料获得。
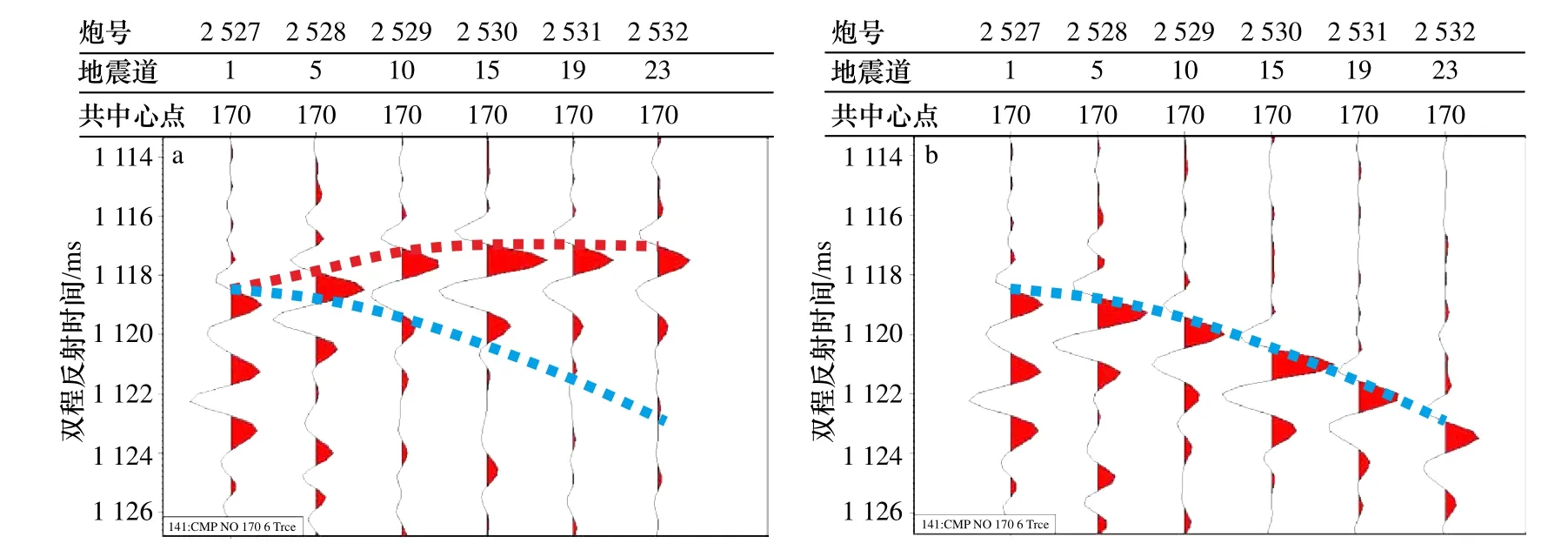
图10 共中心点道集校正Fig.10 Common mid-point gather correction
校正前,共中心点道集海底反射同相轴并不满足理论双曲线规则,说明排列拖缆没有位于同一深度平面上。校正后,获得了可靠的海底层位的理论双曲线型反射同相轴,为后续的速度扫描提供了可靠的数据基础(图 10)。
3.2 共炮检距道集静校正
分析追踪共炮检距道集反射同相轴时,发现部分接收点同相轴错乱或者突跳,分析认为现场受风浪或涌浪影响引起震源、接收排列偏离原位置,导致排列弯曲,或者同时受激发采集系统记录延迟的影响,造成不同炮集检波点的海底反射时间发生偏差,该偏差需要通过校正归位到理论位置上,否则会影响后续的速度分析。
处理中采用单道地震和浅地层剖面调查数据中的涌浪改正方法,利用模型道互相关技术以及平滑滤波方法[12-14],对地震数据共炮检距剖面进行涌浪改正处理,改正后错乱的同层位反射同相轴归位到正确的时间位置(图 11)。
3.3 叠加剖面水深校正
经过共反射点与共炮检距剖面静校正后,已经将各个检波点校正到同一深度位置上,但是校正参考位置是假设的基准面深度位置,并不是调查海域的实际海平面且采集设备存在固有的系统延迟。为获得准确的反射波旅行时,还需要利用实时测量的水深数据,进行震源与接收缆的整体水深改正,消除震源与接收排列沉放深度的影响,并将反射信号旅行时统一校正到海平面上。
将经过上面静校正后的数据动校正后得到的叠加剖面再进行整体深度改正,获得了图12所示的改正前后最终的剖面对比结果。校正前后,海底同向轴双程反射时间相差4 ms,水深值相差约3 m。排列整体深度校正主要取决于拖缆整体沉放深度,拖缆越靠近海平面,校正值越小。

图11 共炮检距道集校正Fig.11 Common offset gather correction

图12 叠加剖面排列整体深度校正Fig.12 Stack section alignment overall depth correction
4 叠加效果分析
对我国第30次南极科考“雪龙”船上所采集的短排列多道地震数据进行上述相关的改正处理,即实际坐标观测系统定义以及沉放深度校正特殊处理后,再经过常规的CMP抽道集、动校正、水平叠加处理,以及合适参数的带通滤波处理与能量均衡处理后,获得了图13所示的最终成果对比图。
从图13a中可以看出校正前信噪比极差,反射层位的同相轴连续性无法追踪,波组特征混乱,海底浅部层位(双程反射时间1 170 ms以上)信息基本看不清楚,稍深处(双程反射时间1 200~1 300 ms)呈现模糊的间断反射层位信息(如C区)。图13b表明基于实际坐标观测系统定义与沉放深度校正处理后,不清楚的重点区块同相轴变得清晰可见,层位可连续追踪,剖面分辨率和信噪比均获得明显的提高(如A区与 A′区,B 区与 B′区,C 区与 C′区的对比)。
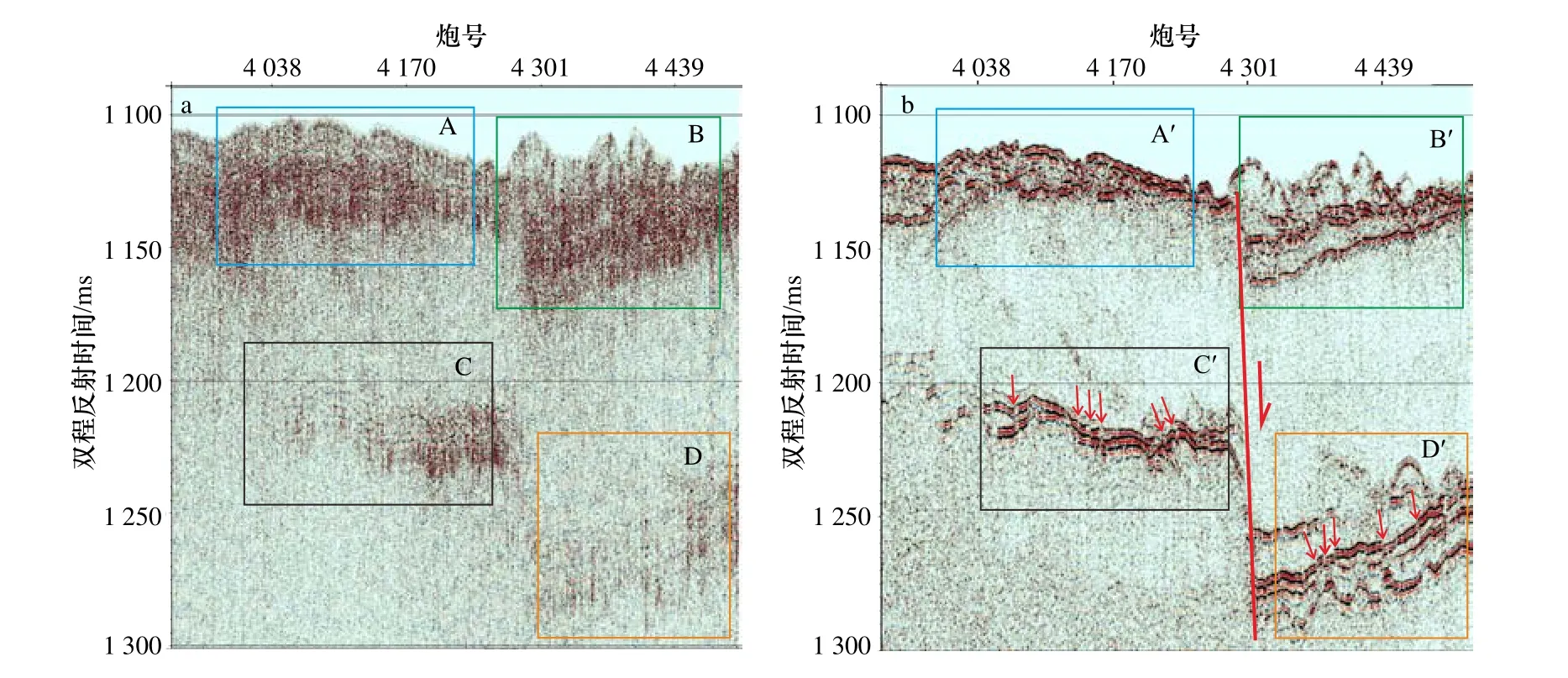
图13 叠加效果分析Fig.13 Analysis of stack section
图13中改正后清晰的强反射同相轴之间夹杂了明显的空白反射层,这些空白反射层的厚度横向不均一(如B′区),这种“三明治”式结构在南极海域较为典型,空白反射层往往是杂乱的混杂堆积(冰碛层)。结合其他调查资料(多波束地形地貌和公开地震剖面及前人研究成果),发现处理剖面上揭示出了南极罗斯海调查区域存在多次冰碛堆积,反映出了冰盖多次到达该区域并产生显著的地质影响。同时,剖面炮号4 270~4 290间存在一明显的正断层,还发现大量小的组合正断层(C′区和D′区红色箭头处),说明该海域发生过强烈的现代构造活动,在海底中浅部地层上留下了多处明显断层构造。
通过充分利用这些有效处理后的高质量地震剖面,可以深入分析南极海域的冰川活动历史及现代地质构造活动,为南极冰川气候和海底环境变化研究提供可靠的科学证据。
5 结论
对于拖缆上未接入水鸟等定深和定位设备的短排列多道地震数据,基于直线假设定义的常规观测系统,共反射点计算结果不仅偏离实际测线位置,还造成叠加次数偏差;另外,拖缆沉放深度的不一致导致接收点不位于同一深度平面内,处理后的叠加剖面同向轴错乱,信噪比与分辨率都很差。
针对中国第30次南极科考在罗斯海维多利亚地盆地采集的24道短排列无水鸟数据,采用文中新的观测系统定义方法及排列静校正处理技术,利用导航数据计算实际坐标位置,采用反距离比线性插值方法模拟拖缆的拖行状态和轨迹,准确计算接收点坐标;同时根据理论时距曲线计算排列接收点的拟合静校正量,将接收点校正到同一基准面上。
通过以上所述改进原理及计算方法,有效处理了连续5年采集的南极罗斯海海域多道地震勘探数据,获得了高信噪比、高分辨率的叠加剖面,为南极海域冰盖消长历史及现代地质活动研究提供了可靠的地震剖面证据。但南极海域多道地震勘探仍存在多个悬而未解的技术难题,如南极海域全球导航卫星系统(GNSS)定位精度问题等,可以考虑北斗与GPS组合定位、精密单点定位(PPP)技术等,提高定位数据采样频率等,从而获取高精度的定位信息。
致谢:文中数据由我国第30次南极科考地球物理团队提供,感谢第30次南极科考“雪龙”船上为数据采集提供服务的全体科考队员。感谢北京奥能恒业能源有限公司工程师有价值的数据分析和处理探讨,其有效建议帮助了本文的数据处理完成。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
世界海运(2021年9期)2021-10-08
科学与信息化(2020年4期)2020-10-21
兵工学报(2019年7期)2019-08-28
船海工程(2018年5期)2018-11-01
大科技·C版(2018年4期)2018-10-21
北京航空航天大学学报(2016年6期)2016-11-16
船舶标准化工程师(2015年5期)2015-12-03
船海工程(2014年4期)2014-06-27
地震研究(2014年3期)2014-02-27
