
基于高频正弦脉振电压注入的永磁电机无传感器控制策略
2020-05-29 08:36刘广业
微电机 2020年4期
梁 帅 , 刘广业
(1.铁道警察学院,郑州 450003; 2.上海科梁信息工程股份有限公司,上海 200030)
0 引 言
近年来,永磁同步电机(Permanent Magnet Synchronic Motor,PMSM)因其具有效率高、可靠性好、体积小结构紧凑以及对环境适应能力强等特点,逐步取代传统的直流电机和感应电机。由于机械传感器成本较高,系统的可靠性和适应性较差的原因,无位置传感器控制策略被国内外学者相继提出,目前已经成为电机控制领域的一项研究热点[1]。
目前,无传感器控制策略基本上可以分成两类[2],第一类是通过电机反电动势信息来观测转子磁极的位置。由于电机反电动势幅值与转速的正比关系,当电机低速运行时估计误差会显著增大,因此该方案主要适用于中高速运行[3-4];另一类方案是根据电机转子结构凸极特性,将高频信号注入到电机定子,然后对激励的高频电流信号进行处理获得位置信息[5-6]。
上世纪80年代,美国威斯康星大学的R. D. Lorenz教授做出了开创性的工作,提出高频信号注入(High Frequency Signal Injection,HFSI)法来获取电机转子位置。按注入方式的不同,常用的高频注入法可以分为:高频旋转注入法、高频方波注入法和高频脉振注入法等。但是,高频信号注入法会引起附加的电磁转矩脉动,从而产生额外高频噪声。目前,针对高频噪音解决方法主要可以分成两种:幅值调整法和频率调整法。①对于幅值调整法,文献[7]针对高频信号幅值与电流信噪比之间的关系进行建模。文献[8]提出动态调整注入电压幅值的策略,为了提高暂态性能,就在暂态运行期间增大注入幅值;为了降低噪音,就在稳态时减小注入信号幅值。②对于频率调整法,文献[9]将注入信号频率提高到理论最高频率(即PWM载波频率)。文献[10]为了解决固定频率注入法噪音频率集中的问题,提出了一种随机频率电压信号注入法。文献[11]提出了一种基于零矢量电流微分的无传感器控制策略,该方案不需要注入辅助信号,但对电流采样精度要求较高。
为了进一步改善IPMSM无传感器中低速控制性能,降低高频信号注入引入的高频噪音。本文提出一种采用随机正弦高频电压信号注入的方案来实现永磁电机无位置传感器运行。设计了一种随机正弦信号的注入方式,并采用一种根据包络线提取转子位置误差信息的方法。在此基础上,设计了一种锁相环位置跟踪器来进一步跟踪转子位置。通过对高频电流的功率谱密度进行分析,可以进一步得到该方法减弱高频噪音的有效性。最后,在电机实验平台上进行了验证。
1 基于固定频率信号注入的位置观测器
1.1 IPMSM高频数学模型
坐标系关系示意图如图1所示,在同步旋转坐标轴系中,永磁电机电压方程为
(1)
式中,ud,uq为dq轴电压分量;id,iq为dq轴电流分量;ωe为转子电角速度;ψf为转子永磁体磁链;Ld,Lq为dq轴定子电感;Rs为定子电阻。

图1 坐标系间关系示意图
当定子绕组中注入高频信号时,可以对定子电阻项、交叉耦合项和反电动势项进行忽略,整理式,可以得到IPMSM高频数学模型
(2)
式中,ud,h,uq,h为dq轴高频电压分量;id,h,iq,h为dq轴高频电流分量;Ld,h,Lq,h为dq轴定子高频电感;Zr为dq轴定子高频阻抗矩阵。
1.2 信号注入与位置信息提取策略
(3)
(4)


(5)
(6)
如果转子位置估计误差的角度Δθr足够小时,可得到sinΔθr≈0,cosΔθr≈1的近似结果,此时式(6)可以简化为如式(7)所示形式。
(7)
高频的电流信号中含有转子位置信息,因此需要对高频电流成分iαβ,h进行提取。从式(7)中分析得到,iαβ,h中包含与注入的信号高频信号有关的量,需要将这部分进行分离,以α轴为例,通过如式(8)所示的信号处理,得到与转子位置信息的三角函数值成正比的iα,θ。同理可以得到β轴与转子位置信息的三角函数值成正比iβ,θ,如式所示。
(8)
(9)
式中,Kθ为与转子位置信息θr没有关系的常量。
上述过程提取了高频电流信号的包络线,进而提取出与转子位置信息直接相关的信息,包含位置信息的电流信号获取方法框图如图2所示。

图2 包含位置信息的电流信号获取方法框图

(10)
2 随机高频脉振电压注入的无传感器控制策略
2.1 随机频率高频正弦电压注入法结构设计

(11)
(12)

由于提取的电流信号中含有大量噪声,所以采用反正切法提取转子位置时效果并不理想,因此本文采用一种锁相环观测器来进一步提高转子位置信息获取的精度。如图3所示,为随机频率高频正弦注入法的整体控制框图。

图3 随机频率高频正弦注入方法整体框图
从图3可以看出,注入的高频信号需要在两种或多种不同频率信号间切换,当注入的高频正弦信号相位相同时,需要对幅值和频率进行设计。如图4所示,为随机信号合成器设计框图,其中,udh,rand是随机注入的高频信号。

图4 随机信号合成器设计框图
注入信号频率控制器对注入频率进行随机选择,较低频率fl和较高频率fh出现的概率分别是P和1-P。通常情况下,注入频率需要在一定限制的范围内选择。一是较低频率要不小于控制延时频率,二是较高频率要不大于处理时间频率。当两个频率确定时,通过改变来调整功率谱波形使之平坦。注入信号幅值控制器可以根据频率变化调整注入信号的幅值。根据式(8)和式(9)所示,如果保证注入信号幅值与注入频率之比恒定,则可以保证iα,θ、iβ,θ的幅值恒定。当注入频率改变时,它可以保持转子位置估计的准确性。此外,电流采样时间也根据频率改变。在上述两种控制器的作用下,最终注入的随机高频信号经过随机信号合成器后如图5所示。从图中可以看到,注入信号的幅值是随频率变化的。

图5 随机注入高频信号
2.2 基于随机高频正弦注入的位置跟踪器设计
在获取包含位置信息的电流信号时,与固定频率注入法相似,需要在信号中乘以电流分离系数2sinωht,由于在随机频率高频注入法中ωh是变化的,则电流分离系数也需做相应调整。因此得到在随机高频注入法中,高频电压波形以及电流分离系数2sinωht的波形对比图如图6所示。

图6 高频电压波形及电流分离系数2sinωht的波形对比图
得到转子位置误差信息以后,通常采用锁相环(PLL)位置跟踪器来进一步辨识转子位置。锁相环结构如图7所示。

图7 锁相环工作原理图
在本论文中,由式(12)可知,在静止坐标系得到的与位置信息相关的电流信号并不与转子位置值θr直接成比例,而是与θr的正弦(或余弦)信号成正比,因此需要对从电流中获取的信号进行相应处理再完成锁相环结构。可以通过正交锁相环结构解决这一问题。如图8所示,正交锁相环结构可以实现反正切函数功能,但与之相比输出角度更加平滑,降低输入信号噪声的影响。

图8 正交锁相环结构图
为了方便锁相环频域特性分析,绘制如图9所示的锁相环等效结构图。其中E是误差信号的放大倍数。

图9 锁相环等效结构图
此结构的开环传递函数GOL表达为式(13)所示,闭环传递函数GCL如式(14 )所示。
(13)
(14)

图10 标幺化的正交锁相环结构
根据上述分析可知系统稳定。但由于误差放大倍数与注入信号幅值频率以及电机电感值有关,系统闭环特征与电机参数及注入信号有关,参数设计较难。为了解决上述问题,需采用误差标幺化处理,标幺化后的锁相环具有适应能力较强的特点。新的闭环传递函数表示为式(15)所示,由此可知,此时观测器的闭环特征仅与系统自身参数有关,即系统的稳定性仅取决于自身,方便设计系统参数。标幺化的正交锁相环如图10所示。
(15)
3 实验结果
通过永磁电机实验平台来完成对设计方案的验证,负载加载通过同轴连接的感应电机采用转矩控制模式来实现。逆变器PWM载波频率和电流环调节频率均设为6 kHz。实验永磁电机参数如表1所示。

表1 2.2kW-IPMSM参数

图11 1 kHz高频信号注入时转子位置观测及误差波形

图12 600 Hz高频信号注入时转子位置观测及误差波形
图11和图12分别为1 kHz和600 Hz高频电压信号注入时的实验波形,从实验结果中可以看出,位置观测误差在5°以内,满足设计要求。将两种注入频率进行随机组合,实验结果如图13所示,为1 kHz与600 Hz高频电压信号随机注入时的电机转子位置观测及误差实验波形。从图中可知,位置观测误差在5°以内,满足设计要求。将随机频率注入法与固定频率注入法实验波形对比,位置观测误差大致相同,证明了随机频率高频注入法可以保证系统的转子位置观测精度。
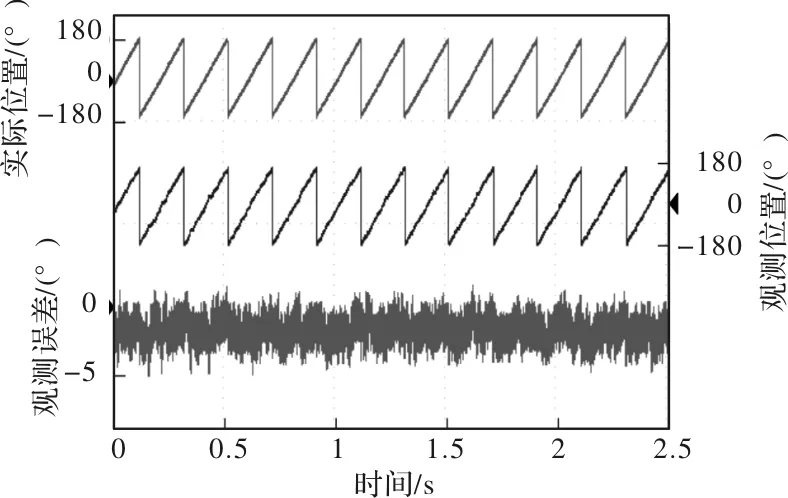
图13 随机高频信号注入时转子位置观测及误差波形
图14为给定转速为100 r/min时,在负载变化条件下,采用随机频率注入法进行位置观测,负载变化动态性能实验波形图。图15为给定负载为空载时,在给定转速变化的条件下,采用随机频率注入法进行位置观测,给定转速变化波形图。在随机频率注入法动态性能测试中,虽然位置观测误差增大,但仍满足观测误差30°以内的设计精度要求,证明了随机频率高频注入策略有良好的动态性能。

图14 负载变化动态性能测试位置观测误差波形

图15 给定转速变化动态性能测试位置观测误差波形
图16为1 kHz高频信号注入时的功率谱分析,图17为600 Hz高频信号注入时的功率谱分析,图18为随机频率注入法的功率谱分析。

图16 1 kHz高频信号注入时的功率谱分析
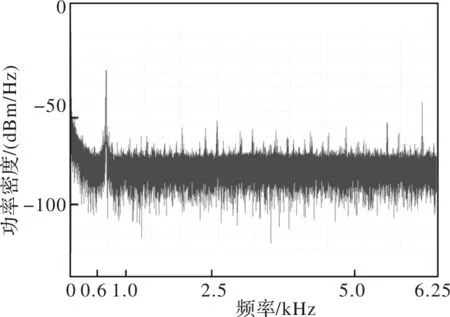
图17 600 Hz高频信号注入时的功率谱分析

图18 随机频率注入法的功率谱分析
根据以上功率谱波形图可以观察到,固定频率注入法中,在注入信号频率(1 kHz或600 Hz)附近功率谱存在较明显尖峰,引起电机发出噪声。可以看出采用所研究方法后,各个频率的功率谱变化更加平缓,从而验证了本论文所提出的基于随机高频正弦注入的无传感器控制技术抑制高频噪声的有效性。
4 结 语
本论文提出了一种基于随机高频正弦电压注入的无位置传感器控制策略,降低了传统高频注入法因高频信号注入产生的额外噪声。实验结果证明,所研究的无传感器控制策略具有较好的暂态和稳态性能指标,位置观测误差能够满足矢量解耦控制要求,实现了对额外噪声的抑制,降低了因固定频率高频电压信号注入而引起的噪声污染。
猜你喜欢
振动与冲击(2022年22期)2022-12-01
电气电子教学学报(2022年3期)2022-07-30
电子技术与软件工程(2022年6期)2022-07-07
装备维修技术(2022年7期)2022-07-01
南方电网技术(2021年8期)2021-09-24
防爆电机(2020年4期)2020-12-14
电动工具(2020年4期)2020-08-20
电子制作(2019年15期)2019-08-27
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
