
两台对称六相PMSM反串联系统容错控制
2020-05-29 08:36刘陵顺闫红广
微电机 2020年4期
刘陵顺,孙 旭,闫红广
(海军航空大学 航空基础学院,山东 烟台 264001)
0 引 言
机车牵引、航空航天和舰船等应用场合通常需要其驱动系统具有较高的可靠性[1]。根据电机控制理论,控制一台多相电机只需要两个自由度,而一台N相电机通常拥有(N-1)个自由度。多相电机因为具有冗余自由度而有容错运行能力,得到了广泛应用。冗余自由度还为多相多电机串联系统创造了可能性,可以实现两台对称六相永磁同步电机反串联系统[2-5]。两台对称六相永磁同步电机反串联系统需要四个自由度来控制,冗余的一个自由度,可以实现缺一相容错运行。电机故障可分为开路故障和短路故障,通过特定的隔离手段,短路故障在一定程度上可以等效为开路故障[6]。因为两台对称六相永磁同步电机反串联系统具有对称性,所以六相电机任意一相开路都可以等效为A相开路,反串联系统六相电机A相开路情况下的容错控制就具有了一定的研究价值。
1 缺A相双电机反串联系统
单逆变器驱动的两台对称六相永磁同步电机反串联系统缺A相框图如图1所示[2]。两台电机相绕组经过了一定的相序转换再进行连接,A、C、E三相直接相连,B、D、F三相反向串联,这种串联方式可以实现两台电机的独立解耦控制。

图1 双对称六相永磁同步电机反串联系统缺A相
六相电机A相开路或者逆变器A相开路时有:
ia=0
(1)
虽然A相相电流为0,但是绕组互感和转子永磁体反电势的存在导致A相电压不恒为0。为保证反串联系统缺相前后运行状态不发生改变,即保持两台电机的转矩与转速不变,解耦变换之后的数学模型应该不变。静止坐标系和旋转坐标系下的电压、电流关系式分别可以通过解耦变换矩阵T6和旋转变换矩阵R变换得到:
(2)
(3)
T6和R分别为

(4)
(5)
式中,Us、Is分别为自然坐标系下的电压、电流矩阵,Uαβ、Iαβ分别为静止坐标系下的电压、电流矩阵,Udq、Idq分别为旋转坐标系下的电压、电流矩阵,θr1、θr2分别为两台电机的转子位置角。
当A相电流为0时,令io1为0,联立式(1)、式(3)得:
(6)
即有:
(7)
进一步可以得到:
(8)
由电压方程可得:
(9)
上式中,R1、R2分别为两台电机的相电阻,Lsσ1、Lsσ2分别为两台电机相绕组的自漏感。
根据矢量控制原理,自然坐标系下的逆变器输出电压Us由三部分电压分量组成,分别是控制第一台六相电机的电压分量U1、控制第二台六相电机的电压分量U2和零序电压分量U3:
(10)
由式(2)可知:
(11)

(12)
旋转坐标系下两台六相电机的电压方程分别为
(13)
(14)
式中,ψf1、ψf2分别为两台电机相绕组永磁磁链峰值,Lsm1=(Ldm1+Lqm1)/2,Lsr1=(Ldm1-Lqm1)/2,Lsm2=(Ldm2+Lqm2)/2,Lsr2=(Ldm2-Lqm2)/2,Ldm1、Lqm1、Ldm2、Lqm2分别为两台电机相绕组主磁通直、交轴电感,ωr1、ωr2分别是两台电机转子电角速度。
根据解耦控制原理可以得三部分电压分量分别为
(15)
(16)
(17)
2 双电机反串联系统容错控制
两台对称六相永磁同步电机反串联系统容错控制框图如图2所示。
在图2中,星号表示给定值。先从反串联的两台电机上分别测得实际转速和转子位置角,然后结合两台电机的转速给定值,经过PI环节分别得到q轴电流给定值。测得六相逆变器各相电流,并进行解耦变换和旋转变换,得到两台电机d、q轴电流实际值,然后结合给定值,经过PI环节分别得到d、q轴电压给定值。将d、q轴电压给定值和零序电压给定值(见式(9))反变换到自然坐标系下,得到三部分电压分量给定值U1、U2、U3,叠加后得到逆变器的期望输出电压。最后根据载波调制规则得到用于驱动逆变器的PWM信号,也就是得到逆变器各个桥臂上的开关状态。因为A相开路,所以A相桥臂的两个开关管在反串联系统故障运行期间恒关断。

图2 反串联系统容错控制
3 双电机反串联系统缺A相仿真研究
3.1 仿真波形
为了验证双电机反串联系统缺A相解耦控制的有效性,在Matlab中搭建仿真模型,分别进行稳态和动态仿真研究。对称六相永磁同步电机参数如表1所示。
给定第一台电机转速为400 r/min、负载转矩为4 Nm,给定第二台电机转速为200 r/min、负载转矩为2 Nm,稳态仿真结果如图3所示。
在反串联系统稳态运行的基础上,0.4 s时将第一台电机的负载转矩从4 Nm变为0 Nm,0.6 s时再由0 Nm变为4 Nm,动态仿真结果如图4所示。
在反串联系统稳态运行的基础上,0.4 s时将第二台电机的转速从200 r/min变为300 r/min,0.6 s时再由300 r/min变为200 r/min,动态仿真结果如图5所示。
3.2 仿真结果分析
由图3(a)、图3(b)可知,两台电机的转速、转矩都能跟踪给定值。由图3(c)、图3(d)可知,id=0的控制策略成功将d1、d2轴电流id1、id2控制在零附近,转矩由q1、q2轴电流iq1、iq2控制。
当第一台电机负载转矩突变后,由图4(a)、图4(b)可知,第一台电机的转矩能够迅速跟踪负载转矩给定值,保持转速平稳,第二台电机的转速、转矩不受影响,继续平稳地跟踪给定值。
当第二台电机给定转速值突变后,由图5(a)、图5(b)可知,第二台电机的转矩也发生瞬间跳变,使转速能够迅速跟踪给定值并保持平稳运行,第一台电机的转速、转矩不受影响,继续平稳地跟踪给定值。
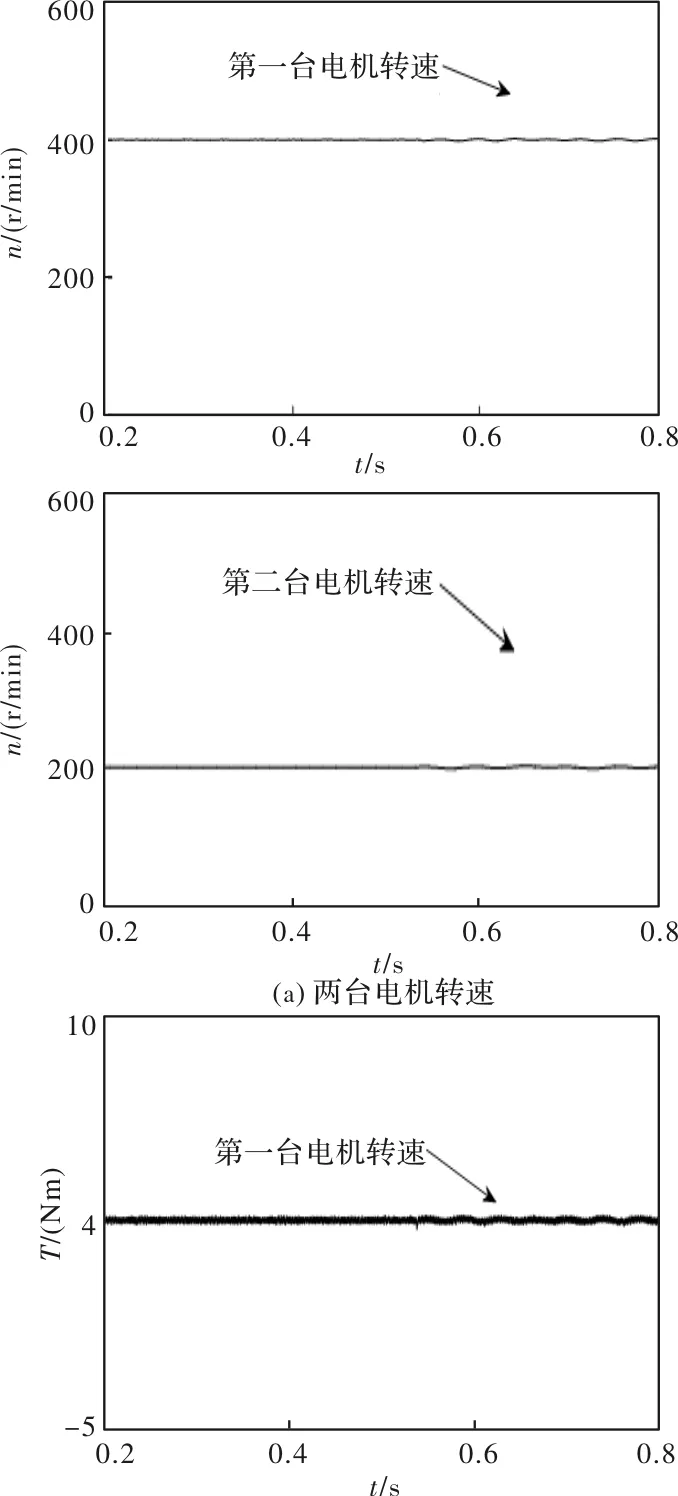

图3 反串联系统稳态仿真结果


图4 第一台电机负载转矩突变时反串联系统动态仿真结果
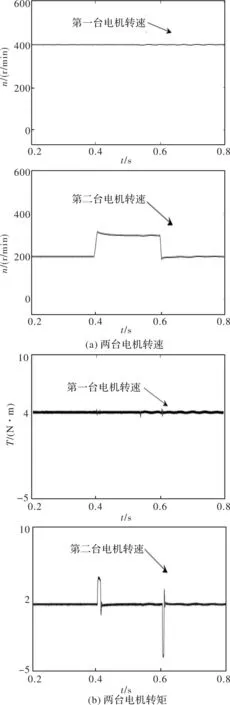
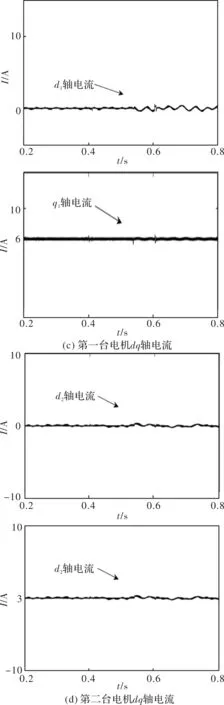
图5 第二台电机给定转速突变时反串联系统动态仿真结果
表1 对称六相永磁同步电机参数

参 数参数值额定电压/V150额定电流/A6.2额定转速/(r/min)1500磁极对数/对2额定功率/W1500电感Lsm/H0.00117电感Lsr/H0.00046电感Lsσ/H0.00083相绕组电阻/Ω1.0永磁体磁链幅值/Wb0.20
4 结 语
为了保证两台对称六相永磁同步电机反串联系统缺A相运行时两台电机的独立解耦控制,分析了基于载波调制的矢量控制方法,并通过仿真验证了该方法的有效性。仿真结果表明,稳态运行时两台电机的转速、转矩都能平稳地跟踪给定值,动态运行时一台电机的转速、负载转矩突变对另一台电机的运行状态不产生影响,实现了对两台电机的解耦控制。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
少男少女·教育管理(2022年3期)2022-05-12
防爆电机(2021年3期)2021-07-21
建材发展导向(2021年7期)2021-07-16
防爆电机(2021年2期)2021-06-09
青年歌声(2019年2期)2019-02-21
科学生活(2016年10期)2016-11-02
作文周刊·小学一年级版(2016年11期)2016-05-10
四川党的建设(2014年10期)2014-08-23
