
变增益策略在PMSM自抗扰控制中的应用与研究
2020-05-29 08:36李寅生陈永军
微电机 2020年4期
李寅生,陈永军
(长江大学 电子信息学院,湖北 荆州 434023)
0 引 言
永磁同步电机(PMSM)矢量调速控制是一种双闭环嵌套控制,其内环为电流环,外环为速度环,内外环分别由电流调节器和速度调节器担任控制器,一般都采用常规的PI控制算法。PI控制存在鲁棒性差、抗扰能力不足等问题,固定的控制参数不足以应对PMSM的负载变化、参数摄动和机械滞后等不确定性[1],因此,优化控制算法是必要的。
自抗扰控制(ADRC)作为一种先进的鲁棒控制算法,利用扩张状态观测器(ESO)对系统未建模动态、外部干扰所引起的集总扰动进行估计并在控制输入端引入等效补偿,实现系统动态补偿线性化和去不确定化[2]。文献[3]对ADRC进行简化,取消了复杂的非线性机制,提出了线性自抗扰控制(LADRC),减少了参数数目,使自抗扰控制在实际工程应用中得到了推广。出于ADRC的优异动稳态性能,其被广泛应用于PMSM矢量控制系统中[4-5],本文将采用一阶LADRC作为PMSM矢量控制系统的速度调节器,对速度环控制算法进行优化。
LADRC继承了ADRC的精髓:利用线性扩张状态观测器(LESO)对系统异于积分标准型以外的部分进行估计并补偿于控制端,实现集总干扰与控制的解耦。可见,LESO是LADRC的关键核心,其能否精确估计系统状态、未建模动态与外扰的实时作用量决定了LADRC的控制品质。文献[6]在频域上对二阶系统的自抗扰控制器的频带特性与参数配置的关系进行了分析,考虑了噪声对系统输出与LESO估测精度的影响,论证得出观测器带宽与抗噪能力呈负相关的结论;文献[7]针对量测噪声对ESO性能的影响进行分析,指出,LESO的大增益会引起量测噪声的放大,加剧噪声污染,并设计了滤波器用以消除噪声;文献[8]对线性ADRC与非线性ADRC两者的优缺点进行分析,指出,得益于LESO的大增益,线性ADRC应对大幅度变化的干扰的能力更强,响应速度更快。
由上述可知,较大的观测器增益能提高LESO对集总干扰的跟踪能力,增强LADRC的抗干扰能力,然而,也会促进LESO对系统量测噪声的放大作用,削弱LADRC的抗噪能力。传统的LESO沿用带宽参数配置法[3],观测器增益与带宽都是固定的,这样就不可避免地在系统的抗扰能力与抗噪能力两者之间作出折中,无法充分发挥LADRC优异的抗干扰“潜质”。为实现LESO估计性能与抗噪能力的“双优化”,本文提出了变增益策略:在干扰变化大的时候采用较大的观测增益,提高LESO的估计能力,强化LADRC的抗干扰能力;在干扰变化小的时候,采用较小的观测增益,增强对噪声的抑制,设计出变增益线性扩张状态观测器(VLESO);分析了VLESO的收敛性和参数特性;将VLESO及其对应的VLADRC的应用于PMSM的速度控制中,最后,通过仿真对其性能进行验证。
1 PMSM数学模型与自抗扰速度控制器
1.1 PMSM的数学模型
本文研究的控制对象是表贴式永磁同步电机,对其进行数学建模,忽略PMSM内部的涡流和磁滞损耗,磁路近似为不饱和,有以下 坐标系的PMSM的微分方程组:
(1)
式中,R和LS分别为电机的定子电阻和定子电感;φf是永磁体磁链;id、iq分别是d-q轴电流分量;J和B分别为电机的转动惯量和粘滞系数;w,TL分别为机械角速度和负载转矩;pn为电机转子极对数。
采用id=0的电流控制策略,则式(1)转化为
(2)
电磁转矩Te为
(3)
可将PMSM矢量控制系统近似为图1所示,由于矢量控制中的速度环时间常数远远大于电流环时间常数,可近似认为
(4)

图1 矢量控制结构图
1.2 自抗扰速度控制器
在矢量控制系统中,负载扰动是系统主要干扰,由图1知,其施加于速度环以内,电流环以外,因此,速度环的抗扰性能决定了整个矢量控制系统的抗负载能力。由式(2)可知,PMSM的调速系统为一阶系统,为提高速度环的抗干扰能力,速度控制器拟采用一阶线性ADRC算法,而电流调节器则继续沿用传统PI跟踪算法。
本文对ADRC进行简化:将ESO和NLSEF线性化,为合理安排给定值过渡过程,保留非线性TD。
由式(2)可得PMSM矢量控制速度环被控对象状态方程如下:
(5)

(6)
式中,
(7)
可设计简化的一阶自抗扰速度控制器:
一阶TD:
(8)
线性化的二阶ESO:
(9)
比例误差反馈控制律:
(10)
fal(·)是非线性函数,表达式如下:
(11)
式中,α为非线性因子,δ线性区间宽度,本文设定α=0.5,δ=0.01。其中z11为给定输入,z21为x的跟踪值,z22为综合干扰的估测值,[β01,β02]为ESO状态反馈增益矩阵,r是TD跟踪快慢因子,b0是估测的控制增益,在本文中,b0为可知的
(12)
简化的一阶ADRC速度控制原理如图2所示。

图2 一阶简化ADRC速度控制原理图
2 基于变增益策略的线性自抗扰控制(VLADRC)
根据文献[3]的“带宽参数配置法”,二阶LESO的增益配置为
(13)
β02为LESO的观测增益,有结论[6],增益越大,LESO的带宽越宽,其跟踪估计能力越好,LADRC的抗干扰能力越强;同时,增益增大又会带来量测噪声放大的困扰。因此,LESO观测增益的设置必须综合考虑观测器的跟踪能力和噪声抑制,由于两者呈负相关,固定的观测增益显然无法同时实现扰动估计能力和噪声抑制能力的双优化,必须在两者之间做出一定的牺牲,无法充分发挥LADRC的性能。

(14)
β02=Q(|e1|)
(15)
(16)
式中,B为下限增益B0.2min,B和a决定了上限增益B02max=B+0.5a,μ为敏感因子。
以B=1 440 000,a=8 640 000,μ=1为例,其函数特性曲线如图3所示,当跟踪误差|e1|较小时,增益β02较小且变化较为平缓,这有利于对测量噪声的抑制;当跟踪误差|e1|超过平缓区时,β02会以较大的斜率进行增长,这有利于遭遇大幅度变化干扰时能快速提高LESO的跟踪能力;当跟踪误差|e1|大于一定值后,增益β02将达到最大值β02max且不会再增加,这样限制了增益的无休止增长,保证了系统的稳定。
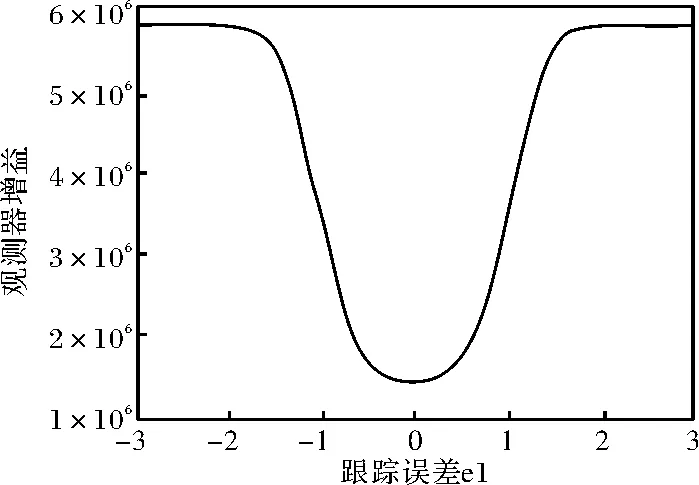
图3 变增益函数特性曲线
3 变增益线性扩张状态观测器(VLESO)的收敛性与参数特性分析
3.1 VLESO的收敛性分析
设LESO的状态与集总扰动跟踪误差为e1=z21-w,e2=z22-f,综合式(5)、式(9)、式(13)和式(16)可得LESO的误差状态方程
(17)

(18)
对以下两种情况的集总扰动跟踪误差e2的收敛性进行分析。
情况一:f有界,即|f|≤|M1|.
情况二:d有界,即|d|≤|M2|.

(19)
可见,当f有界时,只要变增益函数的下限值β02min>0即可保证LESO的集总扰动跟踪误差会收敛于0,其收敛过程与速度由LESO的特征方程的特征根决定。

(20)
又因为|K2|≤|M2|且Q(|e1|)≥β02min
(21)
可见,当集总扰动的导数有界时,只要β02min即可保证LESO的扰动估计误差也有界。
3.2 VLESO的参数特性分析
由前述分析可知,VLESO的主要调节参数只有三个,分别是决定增益上下限的B和a,还有敏感因子μ。B和a的设置要综合考虑VLESO的扰动估计能力和噪声抑制的需求,增益上限β02max=B+0.5a决定了VLESO估计大幅度变化扰动时的上限跟踪能力,增益下限β02min=B则决定了VLESO稳态时的噪声抑制性能。除去B和a,本节主要分析敏感因子对变增益函数Q(|e1|)和VLESO性能的影响。
固定B=1 440 000,a=8 640 000,敏感因子μ分别取0.5、1、2和4,得到的变增益函数特性曲线如图4所示。可知,随着敏感因子μ的增大,低增益的平缓区域缩小,曲线变得更加陡峭,这会提升变增益函数Q(|e1|)对扰动的响应速度,增强VLESO的跟踪能力;同时,随着低增益平缓区域的收窄,变增益函数对量测噪声的敏感度会升高,VLESO的噪声抑制能力会削弱。
综上所述,可总结VLESO的参数设置规律:先综合考虑VLESO的扰动估计能力与噪声抑制性能的需求设置参数B和a。在PMSM矢量控制系统中,主要考虑两方面:第一,PMSM有可能遭受的最大负载变化幅度;第二,输出端量测噪声污染程度。当PMSM所遭受的负载波动是大范围的,则要设置较大的B和a;当输出端噪声污染严重,应设置较小的B以提高VLESO的稳态抗噪能力。
确定了增益上下限后,可调节敏感因子μ的大小对变增益函数Q(|e1|)进行微调,增大μ可提高VLESO对扰动变化的响应速度,减小μ可降低VLESO对噪声的敏感度。

图4 各敏感因子下的Q(|E1|)对比
4 基于VLADRC速度控制器的PMSM矢量控制仿真验证
本文在Matlab/Simulink上利用S函数设计出一阶LADRC速度控制器和VLADRC速度控制器,并搭建PMSM矢量控制仿真模型,仿真采用的PMSM参数如表1所示。

表1 仿真采用PMSM参数
为了验证VLADRC的性能,本文将其与低增益LADRC(β02=1 440 000)和高增益LADRC(β02=4 000 000)进行对比。为了削弱仿真初期“大误差,大增益”所引起的“峰值效应”,本文仿真设置安排过程较慢的微分跟踪器TD(r=500),设置VLESO的参数为B=1 440 000,a=8 6400 00,μ=1。
空载工况下,在转速输出端叠加方差为0.01,采样时间为1e-4s的高斯白噪声,以模拟转速传感器的量测噪声,设置转速在0 s由0阶跃到1000 r/min,在0.25 s时突加大小为20 Nm的阶跃负载。低增益LESO、高增益LESO和VLESO观测所得集总干扰 及其局部放大对比如图5所示,转速响应特性曲线局部放大对比如图6所示,仿真过程中VLESO的观测增益波动如图7所示。可知,高增益LESO的噪声污染明显严重于低增益LESO和VLESO,VLESO的噪声抑制能力达到了与低增益LESO相当的水平;另外,由局部放大对比可知,VLESO和高增益LESO的响应速度远高于低增益LESO,虽然前两者产生一定的小幅度超调,但对于拥有电流环这样一个一阶惯性环节的PMSM矢量控制系统来说,小幅度的超调更有利于转速降的抑制,这一点在图6得到了印证。综上述,VLESO兼具出色的集总扰动跟踪能力和噪声抑制性能。
由图6能明显看出,VLADRC速度控制下的永磁同步电机在遭遇阶跃突变负载后,其转速降要比低增益LADRC小,达到了与高增益LADRC差不多的水准,转速恢复时间均比低增益LADRC和高增益LADRC短,说明,VLADRC具有较强的抗干扰能力。
另外,由图7能明显看出,在电机转速进入稳态时,VLESO的观测增益虽然有些许小幅度波动(主要由量测噪声引起的),但总体依旧维持在较低的水平,这无疑有利于对量测噪声的抑制;当遭遇突变负载后,VLESO的观测增益能在极短的时间内提高到上限,瞬时提升VLESO的跟踪能力;当VLESO跟踪上突变扰动后,观测增益又在极短的时间内恢复到下限相当的水平。
综上所述,VLADRC兼具出色的抗干扰和抗噪能力,其性能在仿真中得到了验证。

图5 集总扰动观测值及其局部放大对比

图6 转速响应特性(含高斯白噪声)的局部放大对比

图7 仿真过程的VLESO增益波动
5 结 语
本文为了提高PMSM矢量控制系统的自抗扰速度控制器的调速品质,实现抗扰与抗噪性能双优,设计出基于变增益策略的线性扩张状态观测器(VLESO),并分析了其收敛性和参数特性,得到了参数设置的一般规律。将由此衍生出来的变增益线性自抗扰控制(VLADRC)应用于PMSM矢量控制的速度调节上,并通过仿真验证了其性能,表明,PMSM的VLADRC速度控制器兼具优秀的抗负载与抗噪性能,本文的设计构思是合理的。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年6期)2021-07-20
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年1期)2017-11-24
