
一种基于ARM+CPLD的车载步进电机控制器设计
2020-05-29 08:36王福杰于长勃
微电机 2020年4期
王福杰,于长勃
(山东得普达电机股份有限公司,山东 淄博 255200)
0 引 言
步进电机是根据电磁原理,通过脉冲控制的一种执行装置,其本质上是一种单相或者多相同步电机[1]。当两相步进电机的A、B两相绕组被不断地输入不同幅值的电流时,A、B两组磁极线圈会产生不同的磁力矩,步进电机的转子在合磁力矩的作用下发生转动。步进电机具有精度高,反应灵敏,无积累误差的特点,在现代新能源汽车等追求控制精度高和控制效果好的场合得到广泛地应用[2-3]。
步进电机驱动控制方法通常是采用电流细分,即每次只改变电机绕组中额定电流的某一部分,从而形成多个稳定的中间电流值状态,一个步距角随即分解成为若干小步[4]。伴随着电机控制理论、电力电子技术、计算机处理技术等的快速发展,目前普遍的实现步进电机电流细分驱动的做法是将电流闭环引入到驱动控制电路设计中,由此增加了电流采样、电压比较、信号回采等硬件功能模块,导致增加单机复杂度,削弱了步进电机本质上开环控制的优势[5-6]。为了提高新型车载产品的稳定度,本文介绍了一种基于ARM+CPLD的车载步进电机控制器设计,通过预置驱动波形占空比的方式,在不引入电流闭环的前提下实现步进电机电流细分,降低了系统的复杂性,提高控制器的稳定度。
1 总体方案设计
基于车载产品步进电机伺服控制系统总体需求,本文设计的步进电机控制器的系统交联图如图1所示。整个控制器由信号控制电路、接口调理电路、驱动输出电路和防护电路等部分组成。
从上图可以看出,车载步进电机控制器通过EMI防护电路滤除外部输入端输入信号的复杂高频扰动;接口调理电路主要由通信接口电路、模拟量输入调理电路和离散量输入调理电路组成,通过读取相关传感器或接口数据,实现电机转动方向、阀门角度、温度、压力等模拟量,转速状态信息、停转信号、开关信号等离散开关量的采集功能;信号控制电路主要由ARM和CPLD组成,通过读取接口调理电路发送的输入参数和控制信号,实现控制器的数据通信、信号处理与控制输出功能。步进电机控制器的控制逻辑由SPI接口、总线数据包解析、步进电机控制逻辑三部分组成,ARM处理器通过SPI总线将控制命令下发至CPLD,最后,CPLD根据接收到的控制指令等相关信息进行相关输出控制。与程序控制相比,基于硬件电路控制的CPLD具备更好的稳定性和快速性;但CPLD在数据处理能力和控制算法实现能力不足,因此需要借助于ARM处理器的高集成度和在数据处理速度及控制精度上的优势,从而实现复杂的控制算法需求和必要的数据运算处理、实时解析和控制。驱动输出电路主要是用来输出两相步进电机驱动电流,本文设计的细分驱动方案使用预先固化在CPLD内部的驱动电路桥臂所产生的PWM信号占空比来实现,即通过CPLD的I/O接口直连到H桥驱动电路的桥臂。相比传统的对A、B绕组电流进行采样等闭环控制方案,本设计减少了电流采样、电压比较、信号回采等功能模块,在保证性能的前提下,极大地降低了控制器产品的设计冗余度,提高了可靠性。

图1 车载步进电机控制器硬件实现框图
2 开环细分驱动方案设计
给步进电机的A、B各相绕组按照一定时序通电,步进电机就会运动起来[7]。为了提高步进电机组件运动过程的平稳度,通常采用细分技术对步进电机的相电流进行细分。如果没有对步进电机细分控制,流入步进电机中的电流是方波,进行细分控制后,流入步进电机各相的电流就是一步一个台阶的阶梯波,从而使电机每输入一个阶梯波就旋转一小步。电流细分驱动原理为在不改变电机结构设计的前提下,通过特定的驱动方式,每次只改变电机绕组中额定电流的一部分,以形成多个稳定的中间电流值状态,实现将一个步距角分解成若干小步的功能[8]。
本文设计的开环细分驱动方案为,采用8细分法,即在两相步进电机的A、B绕组上各通以相位角差为π/2、幅值相等的正弦电流。针对步进电机绕组的H桥驱动电路,通过产生H桥PWM驱动信号来对各绕组电流进行设置,从而达到以开环的方式实现电流细分,形成如图2所示的多个稳定的中间电流值状态。同时,又不至于细分数过高导致控制器中CPLD逻辑脉宽溢出。

图2 两相步进电机8细分电流示意图


图3 电流矢量示意图
IA=IMAX·sinθ
(1)
IB=IMAX·cosθ
(2)
如图4所示,本设计通过调节启动时间来使电机相绕组电流达到预定的细分值,其中tON为电机绕组回路的启动时间,tOFF为电机绕组关的断续流时间,Q1、Q2、Q3与Q4分别为全H桥两端上、下桥臂的开关信号。

图4 单相电机绕组驱动电流路径
电流细分值与PWM驱动信号的占空比相互对应,该占空比在预置的CPLD内部代码中实现。开环电流细分方式中,电机绕组电流值与PWM占空比成一定的正比关系,但由于电机绕组呈感性负载特性,电机绕组电流值与PWM占空比又呈现较强的非线性关系,可以用式(3)来表示,其中,tMAX为电机单相绕组所需电流峰值对应的最大占空比,ΔTk为某一细分值下占空比修正值。
tON=tMAX·sinθ+ΔTk
(3)
3 细分驱动逻辑设计


图5 两相步进电机双极式H桥臂信号


图6 正向电流斩波波形图
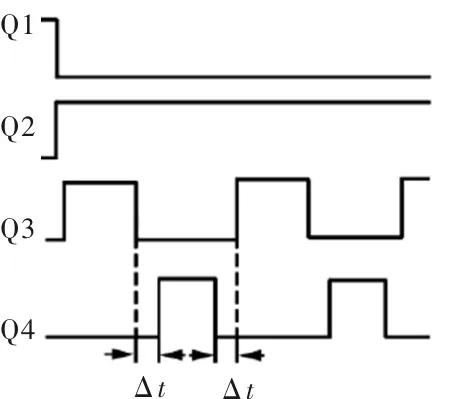
图7 反向电流斩波波形图
根据上述电机驱动控制方式,实现两相混合式步进电机驱动功能的CPLD逻辑设计流程图如图8所示。

图8 细分驱动CPLD逻辑设计流程图
首先,当CPLD输入时钟驱动、复位驱动、细分定时寄存器值时,若复位信号有效,输出细分驱动时钟信号为低电平;反之当复位信号无效,根据细分定时寄存器的值输出相应的细分驱动时钟信号。与此同时,CPLD接收由ARM发送来的电机转动方向、停转信号等控制指令,若复位信号有效,输出的正弦波细分值为0;反之当复位信号无效,并在CLK时钟信号上升沿来临时,根据控制指令输出相应的细分值。最后,再根据其他控制寄存器的输入值,最终输出PWM斩波信号,最终实现对步进电机的驱动电流控制。
4 设计验证
在Simulink中构建如图9所示的两相混合式步进电机细分驱动控制仿真模型,其中control module为主控制模块,inverter为细分驱动模块,stepper motor是已封装完成的电机模型。

图9 步进电机细分驱动控制模块仿真模型图
对步进电机的8细分驱动方案进行仿真,利用Simulink中的示波器Scope检测步进电机A相和B相绕组电流的波形,如图10所示。

图10 步进电机8细分Simulink仿真波形
借助某型车载产品步进电机力矩综合实验设备对本文设计的步进电机控制器进行开环细分驱动控制输出测试,使用示波器对步进电机各相电流进行测量,相电流测试结果如图11所示。

图11 步进电机8细分示波器测试波形
试验表明,本文设计的控制器实际输出测试结果和Simulink的仿真一致。
5 结 语
针对传统的步进电机电流细分驱动设计难以满足现代新能源汽车对车载步进电机成品的可靠性、稳定性的新要求,本文介绍了一种基于ARM+CPLD的车载步进电机控制器设计,通过预置驱动波形占空比的方式,在不引入电流闭环的前提下实现步进电机电流细分,降低了系统的复杂性,提高稳定度。通过仿真和成品测试表明,本设计结构简单、集成度较高,可应用于车载、机载多种领域,具有较好的实用价值。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
防爆电机(2021年6期)2022-01-17
华人时刊(2020年23期)2020-04-13
汽车维修与保养(2019年3期)2019-06-19
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年1期)2017-05-17
专用汽车(2016年9期)2016-03-01
专用汽车(2015年2期)2015-03-01
汽车零部件(2014年5期)2014-11-11
中国记者(2014年1期)2014-03-01
