
钩形弯交叉口信号协同控制优化方法研究
2020-06-12 05:34王健徐志红童蔚苹宋雨嘉刘志远
山东科学 2020年3期
王健,徐志红,童蔚苹,宋雨嘉,刘志远
(1.悉地(苏州)勘察设计顾问有限公司,江苏 苏州 215000;2.东南大学 交通学院,江苏 南京 211189)
钩形弯左转交叉口是车辆在交叉口处借助两个直行相位进行左转的交叉口,因车辆在该交叉口内的左转轨迹像一个钩子,故命名为钩形弯交叉口[1]。通过设置合适的交通设施,钩形弯交叉口可在空间资源不足的道路发挥效用。二十世纪中期,墨尔本首先应用了交叉口机动车钩形转弯的交通组织方式,以解决交叉口内的直行车辆和有轨电车通行效率低以及转弯车辆与电车、直行车的冲突问题,该方法随后被应用于中国台湾、美国伊利诺伊等地[2]。
目前,关于钩形弯交叉口的研究主要集中于交叉口运行性能的评价以及交叉口信号控制方案的优化。在钩形弯交叉口的运营性能方面,Hounsell等[3]通过交通仿真对比钩形弯交叉口与传统交叉口处的车辆运行情况,发现钩形弯交叉口可有效提高直行车的通行能力。与此同时,Bie等[4]对采用自适应控制方法的钩形弯交叉口的运行性能进行了仿真评估。在此基础上, 覃鹏[5]指出合理设置钩形弯有助于减少交叉口的总延误。Currie等[6]对钩形弯交叉口的交通组织方式进行了综述,指出其安全性和通行效率都比传统交叉口要高。
在钩形弯左转交叉口的信号优化方面,成卫等[7]首先建立了钩形弯交叉口的直行车道和直、左、右车辆共用车道的车辆延误模型,为此类交叉口的信号方案提供了理论依据。鉴于在固定信号方案下的配时参数无法随车流量的变化而调整,陈松等[8]将感应控制方法运用于钩形弯左转的信号配时中,运用仿真实验证明了该方法可有效提高钩形弯交叉口的通行能力。Bie等[9]从信号协同的角度出发,对相邻的钩形弯交叉口进行了信号协同优化研究。
已有的研究主要针对单个钩形弯交叉口,而现有钩形弯交叉口普遍存在与相邻的常规交叉口的交通组织优化不够合理的现状。针对此问题,目前尚无有关优化方法的理论依据,该交通组织方式亟需一套系统的信号协同优化方法。因此,本文提出了一种针对钩形弯左转交叉口与常规交叉口的信号协调控制优化方案,以降低钩形弯交叉口与相邻常规交叉口的总体延误,提高通行效率。
1 信号配时方法构建
首先介绍钩形弯左转交叉口的设置方法;然后从单个钩形弯左转交叉口的角度出发,建立单个钩形弯交叉口的信号优化方案;最后从信号协同的角度,提出钩形弯交叉口与相邻常规交叉口的信号协同优化方案。
1.1 钩形弯交叉口渠化设计
1.1.1 标志标线布设
钩形弯左转交叉口的常用渠化方案见图1。在该交叉口中,东西方向存在有轨电车轨道,该方向的左转车对有轨电车的通行干扰较大,故针对东西向左转车辆设置钩形弯左转的交通组织方式。左转机动车在靠近交叉口时,驶入该进口道内的最右侧车道;东西方向的左、直、右方向通行的车辆共用一个信号相位;南北方向采用左转车辆常规组织方法,设置左转专用相位。
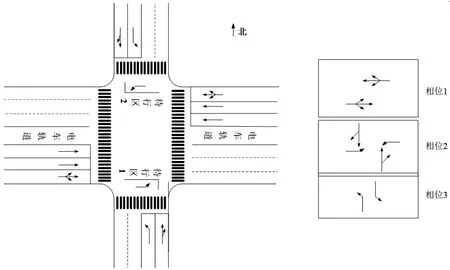
图1 钩形弯左转交叉口渠化方案和相位相序Fig.1 Channelization and phase sequence of hook-turn intersections
1.1.2 进口道延误分析
图1所示交叉口的中间存在有轨电车轨道,轨道内禁止车辆停留,因此该方向的左转机动车的通行受到对向直行车和有轨电车的阻碍,车辆延误增加。而钩形弯交叉口可以有效避免左转车辆、对向直行车辆和有轨电车间的冲突,提高直行车辆的通行能力。钩形弯左转交叉口与常规交叉口的协同布设以及相位相序如图2所示。
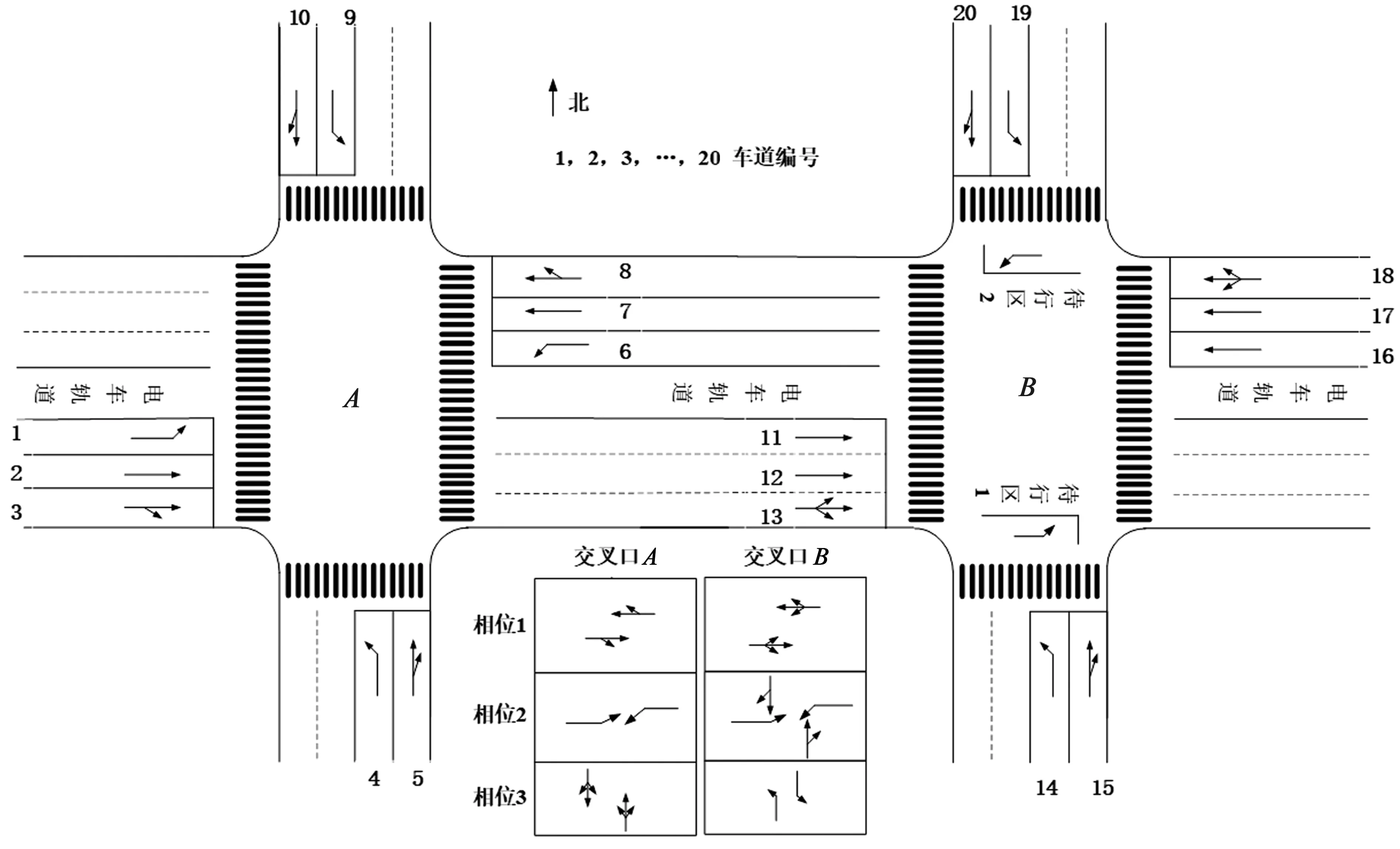
图2 钩形弯左转交叉口与常规交叉口的协同布设以及相位相序Fig.2 Coordination channelization and phase sequence of hook-turn and conventional intersections
1.2 常规交叉口车辆延误模型
对于单个常规交叉口,本文选取单个常规交叉口车辆平均延误最小作为其信号配时方案优化目标。根据交通流到达的泊松分布,设交叉口信号方案的周期时长为C,s;该周期内包含N个信号相位,第i个信号相位的绿灯时间为gi,s;相邻相位间的绿灯间隔时间为Ii,s;第j条进口道的饱和流率为Sj,pcu/h。以图2中的常规交叉口A为例,论述其一个信号周期内各相位的车辆延误计算方法。
1.2.1 常规交叉口车辆延误
首先以相位1的车辆平均延误为例,对于东西向直行车道2、3、7、8,基于交叉口的实际运行条件,运用HCM2010[10]中的车辆延误公式进行其平均延误的计算:
(1)

1.2.2 相邻协同交叉口的车辆延误计算
HCM2010中针对两协同交叉口的中间路段的机动车平均延误的计算公式为:
(2)
(3)
式中:fPF为考虑两交叉口间信号协同影响的延误调整因子;P是车道行驶的车辆绿灯到达的概率;fPA是车辆绿灯到达的调整系数,一般取值为1.0。
在交叉口A的东进口车道6、7、8和交叉口B的西进口道11、12、13的计算中,均需在延误公式的第一项中引入延误调整因子fPF,在后续计算过程中不再赘述。
因此,交叉口A相位1的一个周期内所有车辆的总延误为:
(4)

对于常规交叉口A,相位2的1车道、相位3的4、5、9、10车道的车辆平均延误皆可利用公式(1)获得,相位2的6车道可利用公式(2)计算;相位2、相位3的一个周期内所有车辆的总延误可采用公式(4)计算,详细过程不再论述。
1.3 钩形弯交叉口车辆延误模型
对于钩形弯交叉口,本文同样选择交叉口车辆平均延误最小作为信号方案的优化目标。以图1为例,钩形弯左转交叉口与常规左转交叉口的交通组织差异有:(1)对钩形弯左转机动车而言,需先驶入左转待行区内等待左转;(2)南北方向的直行和右转车辆需要等待前方待行区内的车辆驶离,因此其有效绿灯时间被压缩;(3)东西向各条车道的直行与左转车辆无冲突,可顺畅通行。
采取与前述常规交叉口的同样假设,以图2中的钩形弯交叉口B为例,论述钩形弯交叉口各相位的车辆延误计算方法。
1.3.1 相位1车辆延误计算
对于直行专用车道车辆延误,设置钩形弯左转交通组织方式对东西向直行的交通流运行无影响。因此西进口的直行车道11、12的车辆延误可采用公式(2),东进口的直行车道16、17可采用公式(1)进行计算。
对于共用车道车辆延误,就车道13而言,其左、直、右三个方向的车辆共用一条车道。钩形弯左转的车辆在相位1绿灯时间内,直行进入待行区内排队。若待行区内排队车辆未上溯至车道13,左、直、右方向的车辆均可顺畅通行,此时的车辆延误可利用公式(2)计算;一旦待行区内排队的车辆上溯至车道13,将产生堵塞,车辆延误迅速增加。
鉴于此,将钩形弯交叉口内左转车辆的延误分为车辆在进口道停车线后的延误与车辆在待行区内的延误。以共用车道13为例,设车道13对应的待行区1内的容量为Qk。在相位1的绿灯时间g1内,若越过停车线的左转车流量大于Qk,则待行区内的左转机动车将发生排队上溯。
QB1jmax=g1Sj/3600 ,
(5)
QB1jlmax=QB1jmax[qB1jl/(qB1jz+qB1jl+qB1jr)] ,
(6)
式中:j为车道编号;Sj为车道j的饱和流率;qB1jl、qB1jz、qB1jr分别为该车道左、直、右方向到达的平均车流量;QB1jmax为该车道在相位1的绿灯时间内通行的最大车流量;QB1jlmax为该车道在相位1的绿灯时间通行的最大左转车流量。
当QB1jlmax≤Qk时,待行区的左转车不会发生排队上溯,此时车道j的交通流正常运行,车道j的平均延误可采用公式(1)或公式(2)计算。当QB1jlmax>Qk时,待行区内的左转车可能发生排队上溯,此时需分以下两种情况讨论。
(1)待行区内发生排队上溯时的车辆延误
根据交通流到达的泊松分布,周期C内到达车道j的左转车流量大于待行区容量的概率为:
P(QB1jlmax>Qk)=1-P(QB1jlmax≤Qk),
(7)
(8)
(9)
式中:M为周期时长C内车道j到达的左转机动车数量,pcu;P(M)为周期C内车道j到达的左转车数量为M的概率。

(10)
(11)

(12)

(2)待行区内不发生排队上溯时的车辆延误
P(QB1jlmax≤Qk)为待行区内无排队上溯时的概率,此时机动车运行不受钩形弯影响,仍可采用公式(1)计算,待行区内不发生排队上溯时共用车道的车辆平均延误为:
(13)
综合考虑上述两种情况,共用车道的车均延误为:
(14)
钩形弯交叉口B相位1的一个周期内所有车辆的总延误dB1为:
(15)

1.3.2 相位2车辆延误计算
以图2交叉口B为例,左转机动车驶入待行区内后,将受相位2控制。在相位2的周期时长C内,待行区k内停车等待的车辆数为:
Qwk=min(CqB1jl/3600,QB1jlmax) ,
(16)
其延误为:
(17)
式中,Swk为待行区k内机动车的饱和流率,pcu/h。
由于待行区内车辆的影响,南北方向直右车道内的机动车需等待前方待行区内的车辆驶离后,方可启动。南北向的直行与右转车辆的实际绿灯时间因此减少。设待行区k内车辆驶离所需要的时间为twk。则其计算公式为:
(18)
设车道15、19的实际绿灯时间为g2e,s。其计算公式为:
g2e=g2-twk,
(19)

因此,钩形弯交叉口B相位2的一个周期内所有车辆的总延误dB2等于:
(20)

1.3.3 相位3车辆延误计算
钩形弯交叉口B的相位3的机动车运行的车均延误采用公式(1)计算,因其与常规交叉口在专用左转相位下的车辆运行情况相同。计算过程不再详述。
1.4 钩形弯交叉口与常规交叉口信号协同优化模型建立
由前述公式可得交叉口A和B的一个周期内的各相位车辆平均延误,则钩形弯交叉口与相邻常规交叉口内的车辆平均延误为:

(21)
式中:QA为交叉口A一个周期内到达的全部车辆数,pcu;QB为交叉口B一个周期内到达的全部车辆数,pcu。
基于钩形弯交叉口与相邻常规交叉口内的车辆平均延误最小,建立两交叉口间的信号协同控制优化模型如下:

式中,N为交叉口的相位数。
上述模型中的待优化变量包括交叉口Y的周期时长 、交叉口Y相位i的绿灯时间。求解上述模型,可得钩形弯交叉口与常规交叉口的基于车均延误最小的信号配时协调优化方案。
2 优化验证
本节运用VISSIM软件分别针对现状交叉口与最优方案进行交通仿真,验证上述算法的有效性。使用VISSIM建立仿真模型,输出仿真结果,与现状交叉口运行数据进行对比评价。
2.1 数据采集
选取苏州有轨电车一号线沿线太湖大道与嘉陵江路交叉口为例对所建立的方法进行检验。主干道太湖大道为双向六车道,次干路通墅路和嘉陵江路均为双向四车道;太湖大道与通墅路交叉口(A)有3个信号相位,太湖大道与嘉陵江路交叉口(B)有4个信号相位。两个交叉口均执行分时段信号控制方案。具体交叉口布设及信号相位方案如图3所示,详细信号控制方案如表1所示。
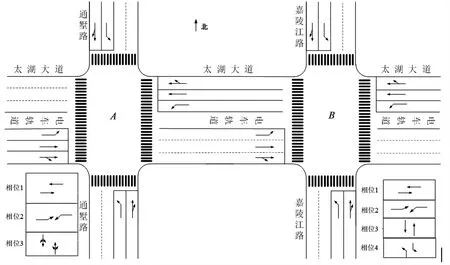
图3 太湖大道与通墅路交叉口、嘉陵江路交叉口现状渠化与相位方案Fig 3 Current channelization and phase scheme for Taihu Avenue-Tongshu Road intersection and Taihu Avenue-Jialingjiang Road intersection
设上述相邻交叉口太湖大道与通墅路交叉口、嘉陵江路交叉口分别为交叉口A和B,交叉口A和B各个相位的绿灯间隔时间均为3 s。

表1 太湖大道与通墅路交叉口、嘉陵江路交叉口现状信号方案Table 1 Current signal timing schemes for Taihu Avenue-Tongshu Road intersection and Taihu Avenue-Jialingjiang Road intersection 单位:s
采集并统计两交叉口的一个工作日内的早高峰、平峰、晚高峰3个时段的流量数据,统计一个工作日内东西南北4个进口方向的左转、直行、右转车流量。具体数据如表2所示。
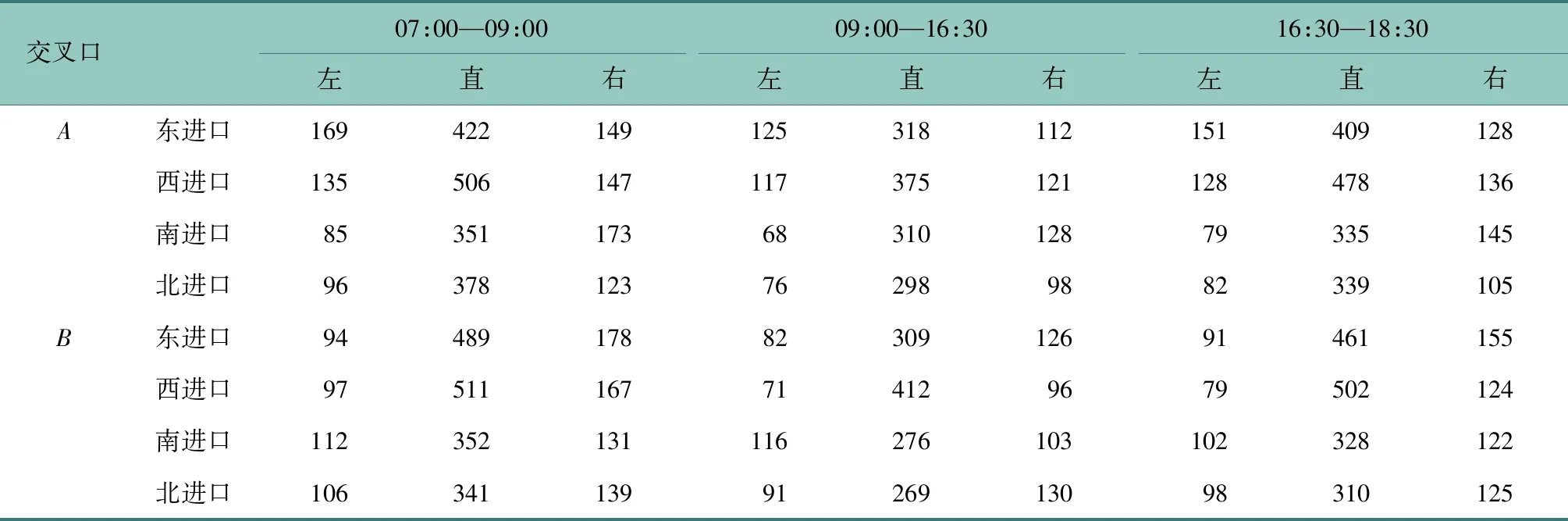
表2 太湖大道与通墅路交叉口、嘉陵江路交叉口交通调查流量Table 2 Investigated traffic volumes of Taihu Avenue-Tongshu Road intersection and Taihu Avenue-Jialingjiang Road intersection 单位:pcu/h
2.2 钩形弯交叉口与常规交叉口信号协同优化方案
钩形弯左转交叉口主要针对左转交通量相对较小的交叉口,由表2的流量数据可得,交叉口B东西向的左转车辆较少,且该道路为有轨电车在路中行驶的主干道。基于前述有关钩形弯的适用条件,针对东西向设置机动车的钩形弯左转,具体渠化方案及信号控制方案如图4所示。

图4 太湖大道与通墅路交叉口和太湖大道与嘉陵江路交叉口信号协同优化方案Fig 4 Signal coordination optimization scheme for Taihu Avenue-Tongshu Road intersection and Taihu Avenue-Jialingjiang Road intersection
依据交叉口各进口道的流量数据,根据公式(22)计算得出前述钩形弯设计方案的最优信号配时。设置周期时长的区间为[50,130],各相位绿灯时长的区间为 [15,50],相位间的绿灯间隔时间为3 s。在Python中编程计算两交叉口的平均延误,得出满足约束条件且使总平均延误最小的最优配时方案,详细配时方案见表3。

表3 太湖大道与通墅路交叉口、嘉陵江路交叉口的信号协同优化方案Table 3 Coordinated signal timing scheme for Taihu Avenue-Tongshu Road intersection and Taihu Avenue-Jialingjiang Road intersection 单位:s
2.3 钩形弯交叉口信号协同优化仿真结果及分析
为进一步对比分析改进方案对交叉口的机动车运行效率的影响,在VISSIM仿真软件中建立太湖大道与嘉陵江路交叉口以及太湖大道与通墅路交叉口的现状模型和改进交叉口模型。依据钩形弯交叉口与相邻常规交叉口间的交通流特性,本文选取交叉口延误评价指标如下:
D1:交叉口A到B间的东西路段行驶的机动车的平均延误;
D2:交叉口A的南北向行驶的机动车的平均延误;
D3:交叉口B的南北向行驶的机动车的平均延误;
D4:研究区域内机动车的平均延误。
在VISSIM中分别建立现状配时方案以及优化后的信号协同控制优化方案。每种方案选取8个不同的随机种子进行仿真,每次仿真5600 s,采集500~4000 s内的评价指标,即D1、D2、D3和D4。针对各个评价指标,分别计算其8次仿真数据的平均数,以此作为评价指标值,详细数据见表4。

表4 两种方案的评价指标Table 4 Evaluation indicators of two schemes 单位:s
4个指标的优化效果分析如下:
(1)改进方案在D1下的平均延误明显小于现状方案,主要分析原因有:一是优化模型考虑干道直行交通流的特性,设置了相位差,由此设定的相位方案能更好地适应机动车的到达模式。二是在现状方案中,东西方向有4条进口车道允许直行,而在改进方案中,东西方向的6条进口车道均允许直行;同时,在现状方案中,东西向车道均设置了机动车左转专用相位,而对于交叉口B而言,实际左转流量并不大,这在一定程度上造成了绿灯时间的浪费,增加了东西向直行的机动车延误。
(2)改进方案的D2指标略小于现状方案的D2指标。在改进方案中,交叉口A的南北向机动车获得的绿信比提高,但是在南北方向显示绿灯期间,对向直行车辆与左转车辆依然存在冲突,因此,改进方案的南北机动车平均延误仅略有降低。
(3)改进方案的D3指标大于现状方案的D3指标。主要原因是交叉口B进行了钩形转弯的相位优化,总周期时长缩短,南北向机动车的相位减少,且其相位时间占总周期时长的比例减小,这在一定程度上减少了通行时间。同时,由于改进方案中的东西采用钩形左转的机动车需占用南北向机动车的部分绿灯时间,进一步压缩了南北向机动车的有效绿灯时间。因此,最终导致改进方案的D3指标大于现状方案。
(4)改进方案的D4指标与现状方案相比,有较明显地下降。主要原因是在相邻交叉口太湖大道与通墅路、太湖大道与嘉陵江路处的东西直行机动车流量占交叉口总机动车流量的比例较大,信号协同优化方法有助于提高干道交叉口的通行能力。同时,太湖大道与嘉陵江路交叉口的左转弯交通流量小,设置钩形弯左转交通组织使直行车辆可获得的绿信比提高,即在一个周期时长内获得更多的绿灯时间,降低了直行机动车延误。因此,改进方案的研究区域内机动车平均延误低于现状方案。
3 结语
本文以钩形弯交叉口与相邻常规交叉口内的车辆平均延误最小为目标,建立了两交叉口间的信号协同优化方案,对提高此类路段的交叉口通行能力具有一定的借鉴作用,尤其是在相邻两个交叉口的干道车辆占总流量比例较大、且左转车流量较小的情况下,通行能力提高作用更为显著。另外应用该方法也可提高干道直行机动车的通行能力,降低车辆的平均延误。本文在模型计算中所体现的常规交叉口为南北双向四车道,东西双向六车道,在常规交叉口的车道数改变的情况下,该模型同样适用。
但受限于调查数据的限制,本文仅运用一个工作日内的数据进行了实例分析,未来可运用更多车流量数据验证本模型的实际效用。另外本文所建立的信号协同方案仅考虑了相邻两个交叉口间的协同控制,对于多个相邻的钩形弯与常规交叉口的协同控制未做深入研究。为更适应交叉口的实际情况,进一步增强模型的实用性,未来可针对相邻的多个钩形弯交叉口与常规交叉口进行信号协同的系统研究。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
建材发展导向(2022年14期)2022-08-19
警察技术(2022年3期)2022-06-22
建材发展导向(2021年19期)2021-12-06
小天使·四年级语数英综合(2021年3期)2021-05-10
作文周刊·小学一年级版(2020年40期)2020-10-19
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
中国房地产业(2016年2期)2016-03-01
郑州大学学报(工学版)(2014年6期)2014-03-01
