电动城市客车分布式轮边后驱控制系统设计
2020-06-23 01:50徐林峰傅琪涛朱绍鹏
客车技术与研究 2020年3期
徐林峰,傅琪涛,朱绍鹏
(1.上海申龙客车有限公司,上海 201108; 2.浙江大学 动力机械及车辆工程研究所,杭州 310027)
目前运营的纯电动城市客车多为中央单电机集中驱动,具有不能释放底盘空间、电机重量大、传动效率不高等缺点[1-3]。随着分布式驱动技术的不断成熟,为应对客户对整车能耗、舒适性、车厢内平地板等要求的不断提升,我司研发了分布式轮边后驱电动城市客车。本文分析分布式轮边后驱系统在电动城市客车上应用的优势和劣势,设计分布式后驱控制策略,并通过路试验证其差力差速的控制功能。
1 轮边后驱应用及优劣势分析
1.1 应用优势分析

图1 分布式轮边后驱系统结构示意图
研发的纯电动城市客车采用分布式轮边后驱独立空气悬架系统,驱动电机与减速器直接安装在独立悬架结构中,具体结构布置方案如图1所示,具有传统中央单电机集中驱动城市客车无法比拟的优势[4-6]。
1) 优化车厢内地板结构。可采用两级踏板布置,车厢内从前到后全平地板,解除后门多级台阶的安全隐患,并扩大有效站立面积,可使车厢内后通道宽度达850 mm,实现乘客快速无障碍流通,从而提高了乘客乘坐的安全性和舒适性。而传统的中央单电机集中驱动由于后桥主减速器和桥壳凸起,后门后车厢通道地板通常有两级或三级台阶[7],安全性和舒适性都较差。
2) 实现整车轻量化增加续驶里程。驱动电机、减速器和轮毂高度集成,安装在独立后悬架轮边结构中,省去了传动轴、刚性后桥和电机支架等。由于设计的分布式轮边后驱控制系统具有电子差速功能,还去除了机械差速器等,就可以采用轮边电机单胎驱动,配合空气独立悬架,这样不仅提高了乘坐舒适性,整个行驶系统可减重约600 kg;另外,轮边后驱系统比单电机集中驱动系统可减重约700 kg,故可比同级别整车减重1 300 kg左右。有研究表明[8],电动汽车整车减重10%,单次充电的续航里程可增加5%~10%。因此,分布式后驱电动客车在减重同时还能增加续驶里程。
3) 增加整车载客能力。对比我司8.5 m中央集中驱动、8.8 m轮边后驱、10.5 m中央集中驱动的3种电动客车技术参数:整备质量分别为9 000 kg、7 700 kg、11 200 kg;后桥通道宽度分别为770 mm、850 mm、770 mm;有效站立面积分别为5.6 m2、8.5 m2、9 m2;最大载客分别为70人、76人、74人; C-WTVC电耗分别为0.55 kWh/km、0.4 kWh/km、0.68 kWh/km。由此可知,8.8 m分布式轮边后驱电动客车由于其整备质量最小,车厢内全平地板,有效站立面积超过10.5 m客车水平,电耗也最低,这样运营成本明显降低。
1.2 应用劣势分析
1) 安装检修不方便。由于安装在独立空气悬架轮边结构中的驱动电机与减速器、轮毂高度集成,所以安装检修不方便。
2) 目前成本较高。由于采用传统空气悬架的城市客车后桥过道宽度只能达到600 mm,不利于乘客快速流通,同时也不方便轮边电机和减速器的布置,因此本方案采用独立空气悬架。目前由于国内城市客车还没有大批量应用独立空气悬架及轮边驱动桥,因此采用分布式轮边后驱独立空气悬架系统相比传统单电机集中驱动空气悬架的城市客车,成本约增加5万元。
3) 可靠性要求更高。由于分布式轮边后驱系统运用轮边电机等大量电气化结构部件,特别是用电子差速取代了机械差速,这对控制系统的实时性及可靠性提出了更高要求。
2 分布式后驱控制系统设计
2.1 后驱控制系统总体设计
根据分布式后驱控制功能,首先进行整车控制系统总体结构设计,如图2所示。其中控制器部分是装载了分布式后驱控制策略的整车驱动控制器[9-10]。

图2 分布式后驱控制系统总体结构设计示意图
2.2 后驱控制策略设计
整车驱动控制器中的分布式后驱控制策略如图3所示,包括车辆状态监控模块、车辆状态估算模块、期望横摆力矩制定模块、后轮转矩分配模块[11]。
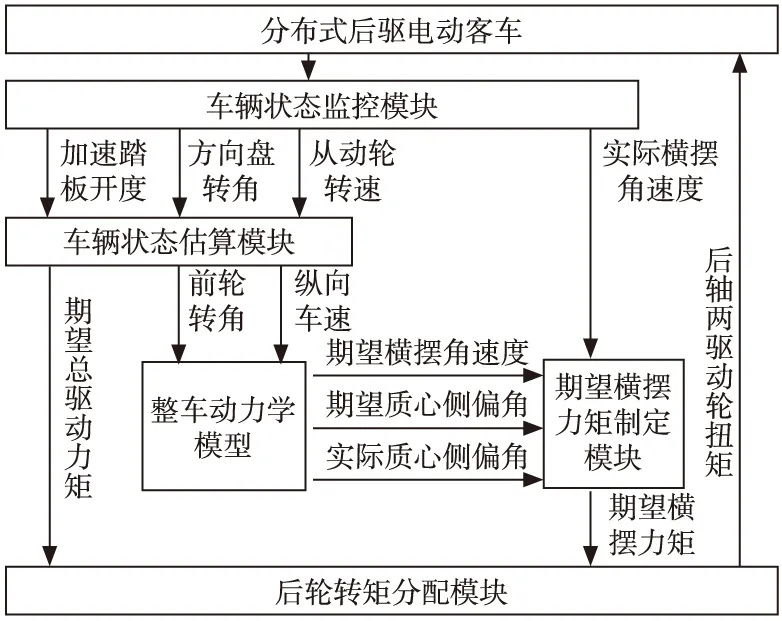
图3 分布式后驱控制策略框架图
1) 车辆状态监控模块通过各传感器获得方向盘转角、前轮轮速、加速踏板开度、车辆实际横摆角速度等信号。
2) 车辆状态估算模块包括前轮转角、车速和期望驱动力的估算。前轮转角估算以方向盘转向角信号为输入,根据方向盘转角与前轮转角间的换算关系输出车辆前轮转角信号。根据前轮从动轮轮速信号输出车辆纵向车速。期望驱动力估算以加速踏板信号为输入,根据电机额定转矩等特性参数与预设关系曲线输出期望驱动力信号。
3) 期望横摆力矩制定模块以横摆角速度和质心侧偏角的实际值和期望值之间的误差为输入,通过模糊控制器输出期望横摆力矩Mzd[11]。车辆实际横摆角速度由传感器获取,期望横摆角速度根据二自由度模型推算得到:
(1)
式中:ωd为车辆期望横摆角速度;vx为纵向车速;K为稳定性因数;δ为前轮转角;L为轴距。
由于车辆实际质心侧偏角较难获取,且传感器价格昂贵,本文采用估算方法得到:
β=tan-1(btanδ/L)
(2)
式中:β为车辆实际质心侧偏角;b为后轴到质心的距离。同时,车辆期望质心侧偏角设为0。
4) 后轮转矩分配模块根据计算得到的期望横摆力矩来分配后轴两驱动轮之间的扭矩大小,可根据式(3)和式(4)计算:
Trl=Td/2-MzdR/w
(3)
Trr=Td/2+MzdR/w
(4)
式中:Trl、Trr分别为左后轮和右后轮扭矩;Td为整车期望驱动扭矩;Mzd为期望横摆力矩;R为车轮滚动半径;w为轮距。
3 分布式后驱电动客车路试验证
路试的主要目的是验证分布式后驱电动客车的差力差速功能,设计了直线加减速工况和蛇形工况。由于试验均为驾驶员手动操作,因此存在一定误差属正常情况。
3.1 直线加减速工况
直线加减速工况如图4中的a曲线所示,其试验结果如图5所示。车速在6~13 m/s之间变化且加减速2次,左右轮电机扭矩的变化情况基本相同且其相加之和为期望总扭矩;车辆横摆角速度和质心侧偏角的期望值和实际值均在0附近,且它们之间的误差较小。说明在直线工况下,分布式驱动控制器能保证左右后驱动轮等扭矩分配,实现直线行驶。在直线测试中发现方向盘转角全程基本处于-50°~0°之间,这是由于路面存在略微倾斜,在坡度较小情况下,算法本身对于直线工况下的小幅度方向盘转角偏差有一定的冗余功能,能更好地保证车辆的直线行驶状态,避免产生非期望的横摆力矩。

图4 纵向车速变化工况曲线

(a) 电机扭矩变化曲线

(b) 横摆角速度及方向盘转角变化曲线
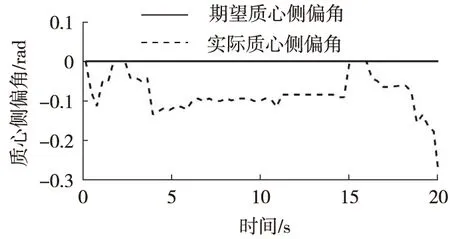
(c) 质心侧偏角变化曲线
3.2 蛇形工况
蛇形工况如图4中的b曲线所示,其试验结果如图6所示。车速基本保持在12 m/s附近,驾驶员在5~20 s时间内快速左右打方向盘约100°,以实现车辆的蛇形行驶。分布式驱动控制器根据方向盘转角的变化同步进行左右后轮扭矩的控制分配,在15~20 s之间车辆制动产生期望负扭矩,设计的控制器也能较好地进行左右轮电制动扭矩的分配。同时,横摆角速度的期望值和实际值贴合较好,质心侧偏角实际值随方向盘变化而波动,其幅值在0.5 rad以内,在误差容许范围内,说明分布式驱动控制器在蛇形工况下实现了较好的差力差速控制效果。但是,由于控制器算法本身的局限性,面对较小的期望总扭矩和较大的横摆力矩时,会产生某一侧车轮扭矩过大而另一侧车轮扭矩过小甚至出现负扭矩的情况,这会对轮胎的使用寿命产生较大影响。今后可以采取扭矩限值或设计自适应的模糊控制器的方法来避免。
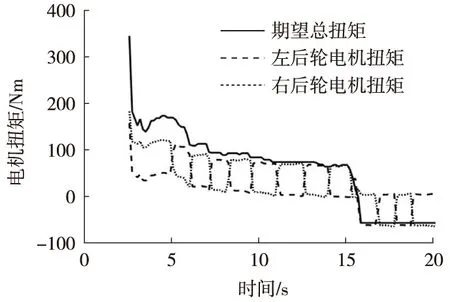
(a)电机扭矩变化曲线

(b)横摆角速度及方向盘转角变化曲线

(c)质心侧偏角变化曲线
4 结束语
目前我司研发的分布式后驱电动城市客车已处于定型可靠性试验阶段,多项性能指标均优于单电机集中式驱动客车。本文研究结果表明,分布式轮边后驱系统不仅优化了城市客车车厢内地板结构,增加了整车载客能力,还实现了整车轻量化,增加了续驶里程,所设计的分布式驱动控制策略实现了很好的差力差速功能,能够替代机械差速器。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年2期)2022-02-21
智能建筑与工程机械(2021年6期)2021-09-10
汽车电器(2021年6期)2021-07-05
汽车零部件(2021年2期)2021-03-05
时代汽车(2021年1期)2021-03-03
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
大众科学(2015年1期)2015-09-10