
基于双曲正切函数的工业机器人滑模控制算法分析
2020-06-24 05:38郑银湖宋永胜邓静
现代信息科技 2020年22期
关键词:机械臂
郑银湖 宋永胜 邓静
摘 要:滑模控制方法具备很好的不变性和抗扰动性能,这得益于系统状态沿滑模面不断滑动。但由于其控制量变化较快,电机遭受的冲击较大,给实际应用造成了一定困难。针对此问题,文章通过将传统滑模控制算法与双曲正切函数进行结合,优化传统滑模控制算法,使得系统在维持原有性能的基础上大幅度削减控制输入信号的抖振问题。理论分析表明,在该方法作用下,系统是渐进收敛的。仿真结果验证了其有效性。
关键词:机械臂;滑模控制;双曲正切函数;轨迹跟踪
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2020)22-0119-04
Analysis of Sliding Mode Control Algorithm for Industrial Robot Based on Hyperbolic Tangent Function
ZHENG Yinhu,SONG Yongsheng,DENG Jing
(Guangdong University of Technology,Guangzhou 510006,China)
Abstract:The sliding mode control method has good invariance and anti-disturbance performance,which benefits from the continuous sliding of the system state along the sliding mode surface. However,due to the rapid change of its control quantity,the motor suffers a greater impact,which causes certain difficulties in practical applications. In response to this problem,this paper combines the traditional sliding mode control algorithm with hyperbolic tangent function to optimize the traditional sliding mode control algorithm,so that the buffeting problem of control input signal can be greatly reduced on the basis of maintaining the original performance of the system. Theoretical analysis shows that the system gradually converges under the action of this method. The simulation results verify its effectiveness.
Keywords:mechanical arm;sliding mode control;hyperbolic tangent function;trajectory tracking
0 引 言
在筆者实验室中所研发的六关节焊接机器人,由于焊接环境复杂,遭受外界干扰多,易出现机器人抖动等问题从而导致焊接效果不佳。为提高控制精度,提升焊接效果,针对六关节焊接机器人,研究一种抗干扰能力好、鲁棒性强的控制方法具有重要的应用价值。
机器人是高度复杂的系统,其控制难度较大。但随着近年来控制学科理论的发展,各类控制算法不断涌现。常用于机器人的主要有PID算法、自适应算法、滑模变结构等等[1-4]。文献[1]结合PID算法和模糊系统规则,设计了相应的控制策略,以提升机器人关节运行稳定性。针对所考虑系统,文献[2]提出了一种自适应控制方法以补偿不确定参数对系统性能所产生的影响。文献[3]对机器人鲁棒控制方法的发展进行了回顾与展望。基于滑模控制理论,文献[4]设计了三种行之有效的方法。在上述方法中,滑模控制以其抗扰动性能强、鲁棒性好等优点,受到了广大科研工作者的强烈关注[5-7]。
滑模控制使得系统状态能够顺利按照预设滑模面滑动以提高整体系统的性能。但这也导致了系统的控制量需要不断切换,其切换频率较高,这在实际系统中是不容易实现的[8-11]。一方面,这对于电机性能的要求较高,另一方面,控制量频繁地切换也会造成对电机的冲击,影响电机寿命。文献[8]针对机械臂系统,结合滑模算法和自适应算法,提出了一种新型的控制方法,可以实现所考虑系统的轨迹跟踪性能。由于机械臂工作的环境一般较为复杂,遭受外界干扰多,为减小外界扰动对系统的影响,文献[9]设计了一种固定时间扰动观测器,将扰动项引入系统的控制设计中进行相应的补偿,同时利用滑模理论,进行控制系统设计,该方法效果显著。文献[10]研究了直线跟踪机器人的自主跟踪给定路径问题,并提出了相应的控制器设计。而文献[11]则对多时间尺度下的带扰动及不确定项的柔性机械臂进行了探讨。因此,对滑模控制方法中的控制量抖振现象进行研究具有非常深远的现实意义。
双曲正切函数由于其特殊的性质,常被用于逼近系统的非线性特征,例如系统的饱和特性等。此外,双曲正切函数相较于传统的切换函数,其最大的优势在于其可以通过近似拟合的方法避免切换时出现的转角,从而减少系统控制量的抖振问题[12-15]。文献[12]将基于双曲正切函数的轨迹模型与传统的多项式规划、样条曲线规划等进行了对比分析,结果表明其所提出的方法具有更高的拟合精度。文献[13]和文献[14]结合双曲正切函数和传统LMS算法(least mean square),可进一步提升系统收敛速度和降低稳态误差。文献[15]则基于双曲正切函数和最优控制理论,对制导系统的控制问题展开了探讨。结合上述讨论,可以得知双曲正切函数应用范围较广,可以切实地提升系统的性能。鉴于传统的滑模控制方法常存在着切换函数,本文将在控制实际中,引入双曲正切函数,通过与传统方法进行结合,以提升系统性能。
综上所述,本文将针对单关节机械臂系统的轨迹跟踪问题,结合双曲正切函数,对传统的滑模控制方法进行改造,以保证所考虑系统的跟踪性能。同时,也使其系统控制量抖动问题进一步缓解,易于物理实现。
1 问题描述
1.1 系统模型
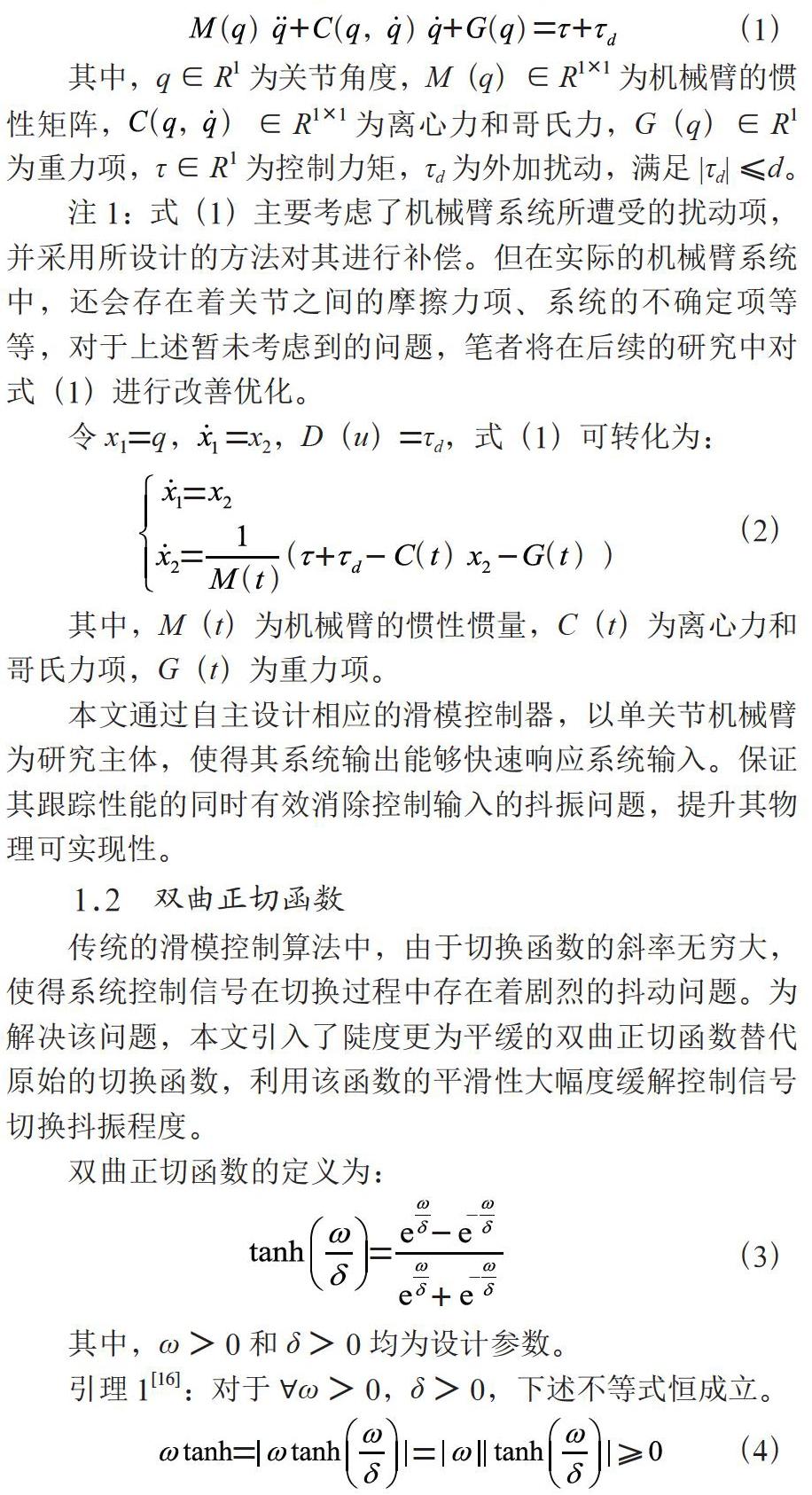
本文将以单关节机械臂为例,其动力学模型可描述为:
其中,q∈R1为关节角度,M(q)∈R1×1为机械臂的惯性矩阵,∈R1×1为离心力和哥氏力,G(q)∈R1
为重力项,τ∈R1为控制力矩,τd为外加扰动,满足|τd|≤ d。
注1:式(1)主要考虑了机械臂系统所遭受的扰动项,并采用所设计的方法对其进行补偿。但在实际的机械臂系统中,还会存在着关节之间的摩擦力项、系统的不确定项等等,对于上述暂未考虑到的问题,笔者将在后续的研究中对式(1)进行改善优化。
令x1=q,=x2,D(u)=τd,式(1)可转化为:
其中,M(t)为机械臂的惯性惯量,C(t)为离心力和哥氏力项,G(t)为重力项。
本文通过自主设计相应的滑模控制器,以单关节机械臂为研究主体,使得其系统输出能够快速响应系统输入。保证其跟踪性能的同时有效消除控制输入的抖振问题,提升其物理可实现性。
1.2 双曲正切函数
传统的滑模控制算法中,由于切换函数的斜率无穷大,使得系统控制信号在切换过程中存在着剧烈的抖动问题。为解决该问题,本文引入了陡度更为平缓的双曲正切函数替代原始的切换函数,利用该函数的平滑性大幅度缓解控制信号切换抖振程度。
双曲正切函数的定义为:
其中,ω>0和δ>0均为设计参数。
引理1[16]:对于?ω>0,δ>0,下述不等式恒成立。
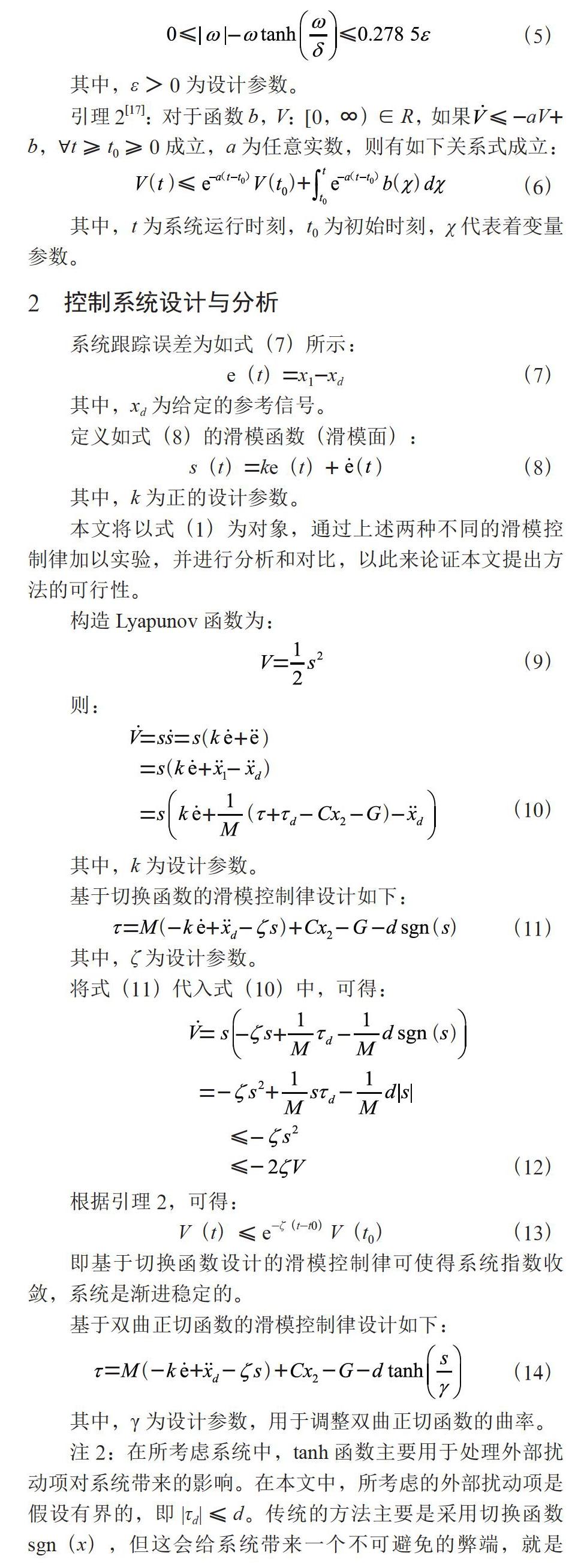
其中,ε>0为设计参数。
引理2[17]:对于函数b,V:[0,∞)∈R,如果 ≤-aV+ b,?t≥t0≥0成立,a为任意实数,则有如下关系式成立:
其中,t为系统运行时刻,t0为初始时刻,χ代表着变量参数。
2 控制系統设计与分析
系统跟踪误差为如式(7)所示:
其中,xd为给定的参考信号。
定义如式(8)的滑模函数(滑模面):
其中,k为正的设计参数。
本文将以式(1)为对象,通过上述两种不同的滑模控制律加以实验,并进行分析和对比,以此来论证本文提出方法的可行性。
构造Lyapunov函数为:
即基于切换函数设计的滑模控制律可使得系统指数收敛,系统是渐进稳定的。
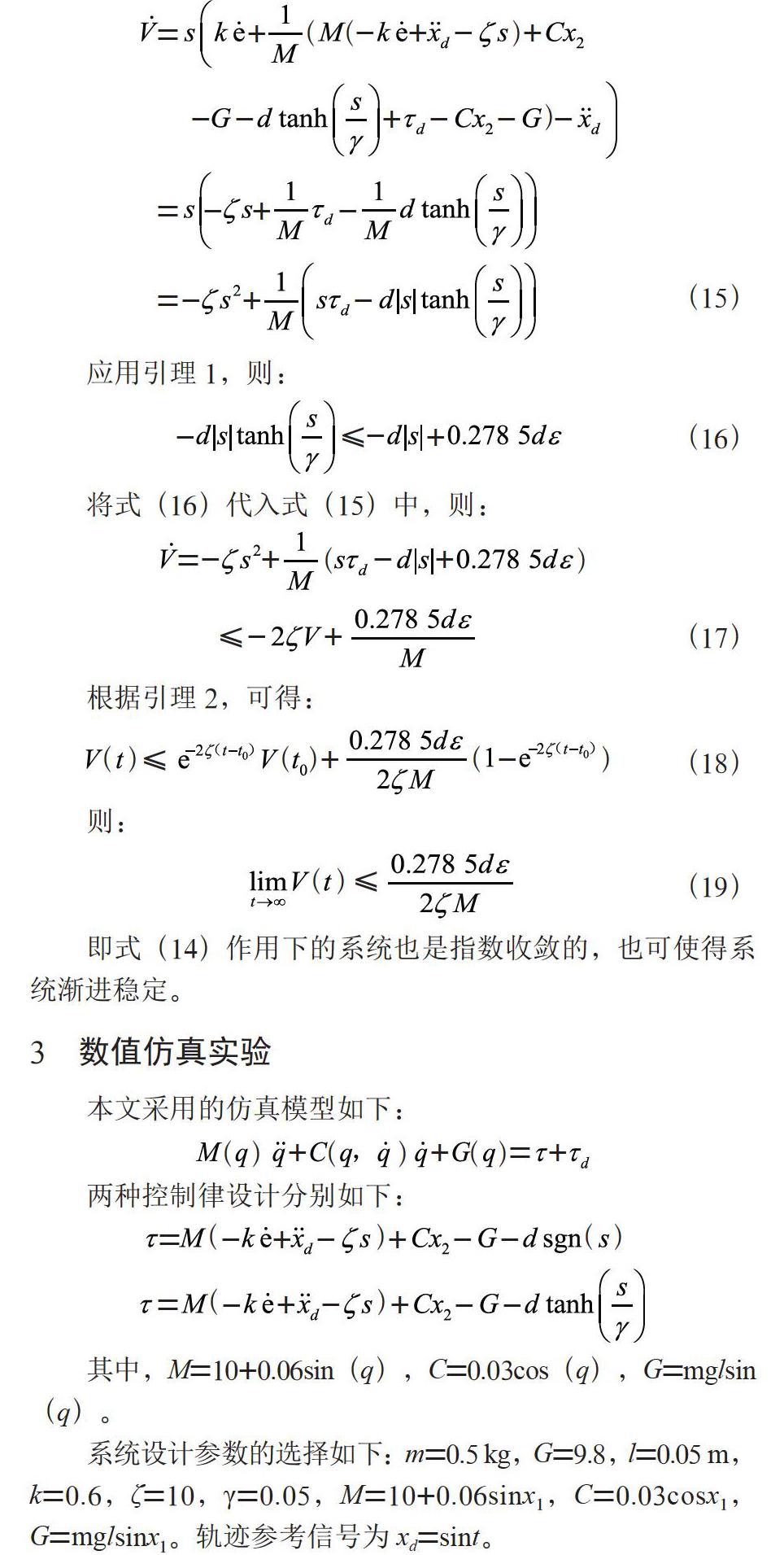
基于双曲正切函数的滑模控制律设计如下:
其中,γ为设计参数,用于调整双曲正切函数的曲率。
注2:在所考虑系统中,tanh函数主要用于处理外部扰动项对系统带来的影响。在本文中,所考虑的外部扰动项是假设有界的,即|τd|≤d。传统的方法主要是采用切换函数sgn(x),但这会给系统带来一个不可避免的弊端,就是sgn(x)切换的时候会造成控制量的突变,从而导致控制量跳变的频率进一步加快,这在实际应用中其实是很难实现的,代价极大。在控制设计中,通过结合tanh函数和外部扰动项的d,在控制器中设计相应的补偿项,以抵消外部扰动对系统的影响,从而提升系统的性能。
即式(14)作用下的系统也是指数收敛的,也可使得系统渐进稳定。
3 数值仿真实验
本文采用的仿真模型如下:
两种控制律设计分别如下:
其中,M=10+0.06sin(q),C=0.03cos(q),G=mglsin
系统设计参数的选择如下:m=0.5 kg,G=9.8,l=0.05 m,k=0.6,ζ=10,γ=0.05,M=10+0.06sinx1,C=0.03cosx1,G=mglsinx1。轨迹参考信号为xd=sint。
本文所采用的仿真工具为MATLAB软件,通过将上述系统模型、控制律设计以及参数选择等在MATLAB中进行相应的编写,即可获取相关代码进行仿真验证。在完成相应MATLAB代码的编写后,需要对系统设计参数进行优化调整。本文的目的是在保证系统跟踪性能的基础上,进一步降低控制量的抖振频率,提升其物理可实现性。因此,在参数调整过程中,系统输出的跟踪效果、控制量的抖振频率以及幅值,都是首要考虑的因素。基于传统滑模控制切换函数模型和基于所提出结合双曲正切切换函数模型的仿真结果如图1~图4所示。
图1和图3展示的是两种控制律作用下的系统输出,即机械臂系统的末端角度。由上述仿真结果可知,两种不同思路的控制律都能够实现系统良好的跟踪性能。图2和图4为两种控制律作用下的系统输入,即控制输入。从图2与图4的对比可以明显看出,基于切换函数的滑模控制律切换频率很高,且幅值较大,在实际系统中不易实现。然而,基于所提出方法的控制量切换频率远远低于原始方法,系统稳定后控制力幅值较小,在实际工程上具有更大的可实现性。通过对上述两种不同方法的仿真分析对比结果中可以看出,本文所提出的双曲正切切换函数效果性能更优。
4 结 论
本文在传统滑模控制方法上的控制量切换函数方面进行了相应的改进,以单关节机械臂为研究对象,通过引入双曲正切函数与之结合,既实现了系统整体跟踪性能的优越性,又大幅度消除了系统控制量抖振问题,通过降低控制律切换频率。理论分析结果表明,在运用了本文所提方法后,所考虑的单关节机械臂系统是渐进稳定的。同时实验结果也表明了所提方法的有效性。现阶段本文主要工作成果还在于算法的MATLAB仿真,后续将进一步完善该方法,并将其具体应用于实际的六关节焊接机器人进行实际测试。
参考文献:
[1] 杨小庆,赵振华.多电机机器人模糊PID控制仿真研究 [J].中国工程机械学报,2020,18(3):248-252.
[2] 孙忠廷,柏建军,陈炳旭,等.轮式移动机器人自适应轨迹跟踪控制 [J/OL].控制工程,2020:1-6(2020-12-01).https://doi.org/10.14107/j.cnki.kzgc.20200387.
[3] 谢明江,代颖,施颂椒.机器人鲁棒控制研究进展 [J].机器人,2000(1):73-80.
[4] 李祎丰.非线性机器人的二阶滑模控制 [D].西安:西安电子科技大学,2019.
[5] 陳子杨.基于神经网络和状态观测器的机械臂终端滑模控制研究 [D].南昌:南昌大学,2020.
[6] 李正楠,张锦,殷玉枫,等.多关节机械臂的分数阶滑模变结构神经网络自适应控制 [J/OL].机械科学与技术,2020:1-6(2020-05-22).https://doi.org/10.13433/j.cnki.10 03-8728.20200038.
[7] 梁捷,秦开宇,陈力.弹性关节空间机械臂级联智能滑模控制 [J].力学季刊,2019,40(3):529-542.
[8] 郑耿峰.非完整移动机械臂的自适应模糊滑模控制研究 [J].机电工程,2020,37(1):96-102.
[9] 肖仁,吴定会.机械臂固定时间观测器和自适应滑膜控制方法的设计 [J].机械科学与技术,2020,39(5):714-720.
[10] YILDIZ H,CAN N K,OZGUNEY O C,et al.Sliding mode control of a line following robot [J].Journal of the Brazilian Society of Mechanical Sciences and Engineering,2020,42(11):2446-2450.
[11] 史超.柔性机械臂的多时间尺度滑模控制 [J].控制工程,2020,27(9):1560-1565.
[12] 潘兵宏,王烨.基于双曲正切函数的小客车换道轨迹模型 [J].江苏大学学报(自然科学版),2020,41(4):419-425.
[13] 章坚武,余皓,章谦骅.改进的双曲正切函数的变步长LMS算法 [J].通信学报,2020,41(11):116-123.
[14] 张展,王维,史松林,等.基于改进双曲正切函数的LMS谐波电流检测算法 [J].武汉大学学报(工学版),2020,53(12):1085-1090.
[15] 陈琦,杨靖,王中原,等.带有双曲正切加权函数的落角约束最优制导律 [J].哈尔滨工业大学学报,2020,52(4):92-100.
[16] POLYCARPOU M M,IOANNOU P A.A robust adaptive nonlinear control design [C]//1993 American Control Conference.IEEE,1993:1365-1369.
[17] IOANNOU P A,SUN J. Robust adaptive control [M]. Upper Saddle River:Prentice Hall,1995.
作者简介:郑银湖(1996.05—),男,汉族,广东汕头人,硕士研究生在读,研究方向:自动化焊接、机器人自动化控制;通讯作者:宋永胜(1994.09—),男,汉族,河南周口人,硕士研究生在读,研究方向:机器视觉、智能装备制造;邓静(1996.10—),女,汉族,湖南娄底人,硕士研究生在读,研究方向:工业控制、机器人运动控制。
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19
