
基于飞轮储能阵列的岸桥微网控制系统建模分析
2020-07-09 08:50李树胜
微特电机 2020年6期
刘 平,李树胜
(1.中电建路桥集团有限公司,北京 100048;2.北京泓慧国际能源技术发展有限公司,北京100035)
0 引 言
根据实际应用需求,磁悬浮飞轮储能技术与其它方式储能(电化学储能、压缩空气储能、抽水蓄能、超导储能、超级电容储能等)相比,具有充放电迅速、功率密度和能量密度高、循环效率和放电深度高、寿命长、环境污染小等优点,在诸多领域展示出较好的应用前景[1-9]。目前,国外对飞轮储能技术的研究正逐步进入热潮,美国Active Power和Vycon,德国Piller、加拿大Temper Power等,国内飞轮研究单位包括清华大学、北京航空航天大学以及北京泓慧国际能源技术发展有限公司等,正致力于将飞轮技术真正民用化,产品不断迭代,已在多个方向发挥重要作用,目前飞轮技术在港口方向还没有实际应用案例。
对于不依赖市政电网的港口自备电站而言,岸桥负载的起重大小直接影响了港口的吞吐量和经济效益。从供电来源方面,港口电站通常采用柴油发电机组或者燃气发电机组作为主动力来源,为应对岸桥冲击负荷需求,需要配置远超过岸桥负荷需求的主发电机组和备用发电机组。发电机组加载能力受限,即使增大主发电机组容量,也无法满足岸桥负荷起升和下降加减速时间的需求,造成整个港口运行效率下降,同时降低燃油利用率,油耗增大,经济性较差。因此,解决岸桥冲击性负荷问题、提高发电机组燃料利用率,成为港口自备电站长期运营的迫切需求。
为解决港口岸桥冲击负荷问题,需要增加储能装置,由储能装置的快速释能和吸能,自行消纳岸桥负载中的短期冲击负荷,发电机组稳步加减载,以满足长期负荷需求。考虑到飞轮的诸多优点,将磁悬浮飞轮储能技术应用于港口领域,以微网控制系统形式平抑岸桥冲击负荷是非常理想的选择。当岸桥突提集装箱时,负荷突加,飞轮快速放电,以抵消部分冲击功率,此后发电机组缓慢加载,以应对长时间平稳负荷需求;当发电机组功率超过负载功率或者负荷突减时,飞轮迅速由放电转为充电,以维持发电机组减载功率需求。
基于此,本文搭建了基于磁悬浮储能飞轮阵列的岸桥微网控制系统,并给出了飞轮阵列的功率和容量配置策略,依次采用Simulink搭建了系统仿真模型,对整个岸桥微网控制系统进行仿真分析,验证系统的有效性。
1 港口岸桥微网控制系统模型
1.1 系统组成和工作原理
如图1所示,港口岸桥微网控制系统主要由四部分组成:发电机组(以燃气发电机组为例)、岸桥负载、升压变压器和飞轮储能系统。其中,发电机组、岸桥负载组和升压变压器组并联在同一交流母线上,飞轮储能系统通过升压变压器组与交流母排进行能量交互。飞轮充电时能量由交流母排流入储能系统,飞轮放电时能量由储能系统流入交流母排(如图1中箭头所示)。

图1 岸桥微网控制系统组成图
系统工作原理如下:初始工作,发电机组缓慢加载,飞轮系统以设定功率储能至满电状态。当岸桥负载开始工作并提取较大负荷的集装箱时,飞轮储能系统迅速放电释能,以补偿燃气发电机组无法短时过负荷加载的问题,从而发电机组可按照设定功率缓慢加载,随着发电机组输出功率增加,飞轮储能系统放电功率逐渐降低,以防止储能系统出现电量过低现象。当岸桥负载负荷逐步降低或者集装箱下放时,飞轮储能系统检测到岸桥负荷低于此时发电机组输出功率,则迅速由放电释能状态转为充电蓄能状态,以保证发电机组输出功率不变,同时可以缓慢减载。随着发电机组输出功率降低,飞轮充电功率逐渐降低,以防止储能系统出现电量过高现象。以此循环,随着岸桥负载提升、平移和下放集装箱,飞轮储能系统周期性地充电和放电,确保电量始终维持在中间状态,从而发电机组可始终以理想曲线进行加减载,避免功率过负荷突加和突减。
图2为岸桥微网控制系统结构图,燃气发电机组可以采用多个机组并联,负载组一般可由多个岸桥组成,飞轮储能系统由多组飞轮单机组成阵列系统,飞轮阵列系统可由一组或多组网侧PCS系统(AC/DC)并联于升压变压器端,飞轮单机系统由机侧变流器(DC/AC)和飞轮本体组成。微网控制器用于采集各单元状态和数据信息,并形成飞轮储能系统的充放电控制策略和功率控制命令,即完成四遥功能。交流母排通常采用11 kV母线,飞轮单机可采用常用的690 V电压等级,即升压变压器的变压等级为11 kV/690 V。

图2 岸桥微网控制系统结构图
1.2 飞轮单机系统组成
如图2所示,飞轮单机系统由机侧变流器和飞轮本体组成,其中机侧变流器通常采用常规的基于IGBT单元的双向功率变换器(充电时为逆变器,放电时为整流器),飞轮本体是微网系统的储能单元,其内部组成如图3所示[10-13]。
如图3所示,飞轮本体由同轴的电动/发电一体机、高速转子、五自由度全悬浮电磁轴承、高压真空电极、备用轴承和密封壳体等组成。其中,飞轮电机通常采用高性能的三相永磁同步电机作为驱动机构,由电机定子、转子轴永磁体和高压真空电极组成,用于完成电能—动能—电能的高效率转换;全悬浮电磁轴承由径向和轴向磁轴承以及备用机械轴承组成,用于保持高速转子径向和轴向的全悬浮状态;飞轮壳体同时具有高强度和高密封性,用于保护转子并保持腔体真空状态。

图3 磁悬浮储能飞轮本体示意图
1.3 飞轮永磁同步电机数学模型
根据经典永磁同步电机数学模型,首先给出三相永磁同步电机在三相静止A,B,C坐标系下的电压方程如下[13-15]:
(1)
式中:ua,ub,uc为定子三相电压;ia,ib,ic为定子三相电流;Ls,Rs为定子电感和电阻;φf为永磁体磁链;θr,ωr为转子角位置和电角速度。
采用坐标转换方式,将三相静止坐标系分别转换为两相静止和两相旋转坐标系,得到d,q坐标系下的电压和转矩方程如下[13-15]:
(2)
式中:ud,uq分别为直轴和交轴电压;id,iq分别为直轴和交轴电流;p为电机极对数;Te为电磁转矩;Pe为电机输出功率;Ld,Lq分别为直轴和交轴电感。
对于经典的永磁同步电机矢量控制系统,控制结构通常有两个电流回路:iq电流和id电流回路,其中可采用id=0进行磁链控制,iq电流回路的外环可作功率闭环,即飞轮储能体采用恒功率充放电控制,其控制结构图如图4所示[2]。

图4 飞轮电机恒功率控制结构图
2 飞轮阵列的充放电控制策略
2.1 岸桥负载特性分析
在港口用电负荷中,岸桥用电占据绝大部分负荷,其它厂用电和生活用电占据小部分比例。其中,岸桥等港口起重设备为短时周期性重复工作制,造成整个港口的用电负荷是持续性的变负荷,作业时间负荷较大,非作业时间负荷较小,而且具有明显的突加、突减负荷特性[14-16]。
岸桥在对集装箱作业时一般需要几个过程:提取加速、匀速、减速,下放加速、匀速和减速等。以一台岸桥提取集装箱为例说明,在岸桥由静止到加速阶段,在短时间内出现第一次功率突加冲击;在岸桥匀速阶段,会出现第二次较长时间功率突减冲击;在减速阶段,仍然出现功率突减冲击。下放过程类似。以实际某港口运行数据为例,整个冲击过程如图5所示。第一阶段功率冲击1 600 kW左右,维持时间2s;第二阶段功率1300kW左右,维持时间8s (10~18 s);第三阶段功率在1 100 kW左右,维持时间2 s左右 (18~20 s)。

图5 岸桥冲击负荷图
从图5可以看出,岸桥负荷呈现短时大功率和周期性冲击特性,而港口通常配置多台岸桥装置,岸桥同时工作,对港口电站发电机组影响较大。一般而言,三台及以上岸桥同频起动的概率较小(可通过现场调度实现),在进行发电机组配置时可适当降低容量。
2.2 燃气发电机组加载特性分析
无论柴油发电机组或者燃气发电机组都需要一定的加载时间,且一般不能一步加载至100%功率,而需要分步实施,每步都需要一定的电压及频率的稳定时间。相较于柴油发电机组,燃气发电机组在经济性和燃料供应方面占据一定的优势,是目前发展前景较好的发电机组方案,本文用的是燃气发电机组加储能装置的混合发电方案[17-19]。
以美国品牌康明斯为例,其生产的燃气发电机组加载能力较强且恢复时间较短,缺点是成本较高。表1为康明斯天然气发电机组(型号HV P80W)在母线10.5 kV下的加载特性。

表1 康明斯天然气机组加载特性
从表1可以看出:负载突加25%以下时,电压降低6.39%,电压恢复时间1.18 s,频率降低3.92%,频率恢复时间为4.13 s;负载突加50%~75%时,电压降低5.85%,电压恢复时间为2.78 s,频率降低4.30%,频率恢复时间为6.85 s。负载突加量越大,电压和频率的恢复时间均加长,当负载突加100%时,恢复时间增加到8 s以上,而且在恢复时间内燃气机组不宜再次加载。
基于此,对于港口岸桥短时大功率工作特性,机组的一步加载特性无法满足需要,即使可以强制加载,如果机组长时期处于突加突减在状态,寿命将会大为缩短,同时加大燃料消耗量和降低经济性。因此,增加飞轮储能装置用于消纳岸桥冲击性负荷,降低机组燃料消耗,提高能源利用率,具有明显的实际需求和显著经济效益。
2.3 飞轮阵列容量及充放电功率配置策略
采用飞轮储能阵列系统平抑岸桥功率冲击,需要对飞轮阵列进行容量配置,包括总的储能功率和储电量。飞轮储能阵列既要满足岸桥负荷功率需求,同时又要具备足够的储电量以保证飞轮装置不会出现过充或过放现象。
根据岸桥工作特性可知,一般可以考虑两台岸桥同频起动工况,即飞轮阵列总的储能功率高于两台岸桥的最大功率冲击。以图5数据为例说明,单台岸桥最大功率冲击1 600 kW,两台即3 200 kW,飞轮阵列总的储能功率应高于3 200 kW。
飞轮阵列的储电量配置需考虑岸桥负荷消耗的总电量,同样以图5数据为例,两台岸桥同频起动时,3 200 kW维持2 s,2 600 kW维持8 s,2 200 kW维持2s,总的消耗电量:(3200×2+2600×8 + 2200×2)/3 600=8.78 kW·h。
再考虑飞轮放电深度不高于80%,则飞轮阵列总的储电量应高于8.78/0.8=10.97 kW·h。
得到飞轮阵列的储能功率和储电量后,需要确定飞轮阵列的充放电控制策略,用于得到飞轮阵列实时的充放电功率。
首先,通过高速采样可以得到岸桥负载的实时功率值,用PL表示。设定微网控制器采样周期为TP,则一个采样周期内岸桥负载消耗的电量:
EL=PL·TP/3 600
(5)
其次,通过高速采样可以得到飞轮阵列系统的剩余电量,用EW表示,飞轮阵列系统总的电量事先已知,采用EM表示。则飞轮阵列系统需要实时补充的电量:
EF=EM-EW
(6)
同时,岸桥负载遵循周期性运行规律,假定运行周期为TL。在计算飞轮阵列的充电功率时,原则是在岸桥负载一个运行周期内,飞轮阵列系统可以充电至接近满电量状态。因此,可计算出飞轮阵列的预设充电功率:
PF1=(EF+EL)/TL
(7)
进而,通过高速采样可以得到燃气发电机组当前的输出功率PGN,将式(7)中的PF1与PGN进行比较,得到发电机组的预期输出功率:
(8)
式中:PGM为燃气发电机组一步最大加载量。燃气发电机组按照式(8)进行加载,则一步加载量不超过最大可允许的加载量。
根据岸桥负载功率PL和燃气发电机组预期输出功率PG,可以得到飞轮阵列的充放电功率:
PF=PL-PG
(9)
式中:当PF>0,飞轮阵列处于充电状态;当PF<0,则飞轮阵列处于放电状态,充放电功率值为|PF|。
根据以上所述,基于岸桥负载实时功率、燃气发电机组当前输出功率、飞轮阵列剩余电量,以及发电机组一步最大加载量、负载运行周期和微网控制器采样周期等参数,可以获取飞轮阵列的实时充放电功率。
2.4 飞轮阵列协同控制策略
如图2所示,飞轮阵列中的各单机分别通过总线接口与微网控制器连接,微网控制器分别对各飞轮进行协同控制,总线接口采用高速光纤通信或者工业以太网等,速率达到10 Mbit/s以上。
在实际运行过程中,由微网控制器实时计算得到飞轮阵列总的充放电功率(式(9)中的PF),采用等功率控制或等时间长度控制策略。其中,等功率控制为飞轮充放电功率等于总功率除以飞轮个数,这种控制方式结构简单,但是容易造成飞轮之间的转速差异;等时间长度控制策略将各飞轮当前剩余电量与阵列总电量的比值作为功率分配比例,这种控制策略可以获取最长的并网充放电时间,保证各飞轮之间的协同一致性。
如图6所示,ΔE为飞轮阵列总的剩余电量(所有飞轮剩余电量之和),ΔEi为第i飞轮剩余电量,ωi为第i飞轮当前转速,Pi为第i飞轮充放电功率,Ti为第i飞轮电磁转矩。其中:
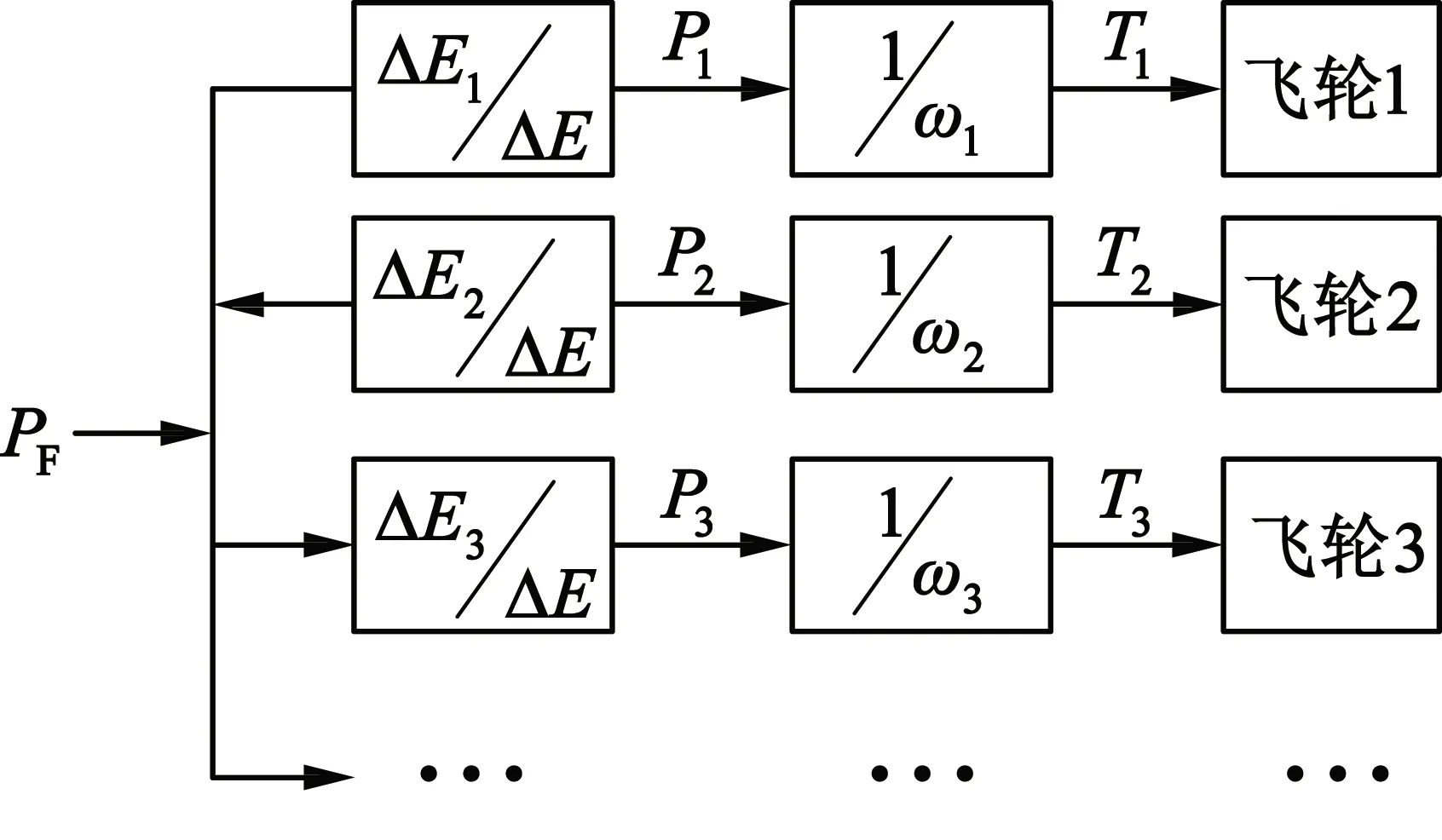
图6 等时间长度充放电协同控制策略
(10)
微网控制器采用等时间长度协同控制策略,并实时监测飞轮剩余电量和运行状态,一旦某个飞轮故障,迅速关闭这系统,同时更新阵列的总电量和飞轮个数,以实时协同控制在线飞轮系统。
3 飞轮岸桥微网控制系统仿真分析
3.1 飞轮单机实验装置
本文在作者单位的支持下,以自研的250kW/3 kWh磁悬浮储能飞轮为实验对象进行了岸桥微网控制系统仿真分析,飞轮单机实验装置如图7所示。实验装置的组成部分包括飞轮本体、充放电变流器、磁悬浮控制系统、真空系统、风机系统以及主控屏幕系统等。飞轮单机系统参数如表2所示。
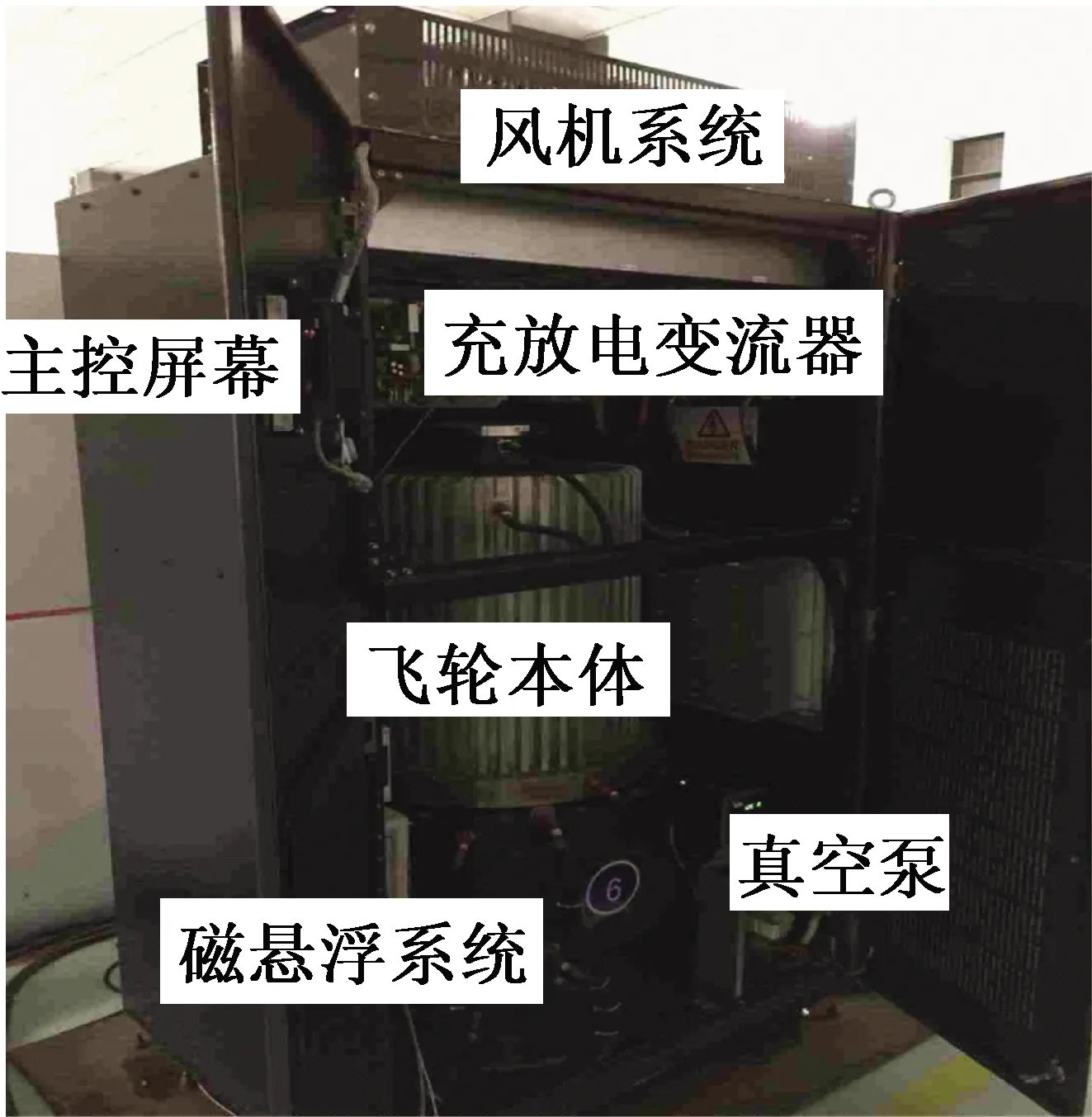
图7 磁悬浮储能飞轮单机实验装置
表2 飞轮单机系统参数

参数数值参数数值最大储电量EN/(kW·h)3电机极对数p2最高转速nr/(r·min-1)11 000电机类型三相PMSM转子转动惯量JN/(kg·m2)16.2额定电流iN/A251额定功率PN/kW300额定电压uN/V690
3.2 系统仿真模型
基于前文所述,飞轮阵列储能功率应高于3 200kW,储电量高于10.97kW·h,而表2中飞轮单机额定功率为300kW,最大储电量为3kW·h。因此,可选择12台飞轮单机组成阵列系统,总的储能功率为3 600kW,最大储电量36kW·h,完全满足系统需要。为验证所述微网控制系统的有效性,本文搭建了基于MATLABSimulink模块的系统仿真模型,分三部分:燃气发电机组简易模型、岸桥负载模型和飞轮阵列系统模型。
燃气发电机组的实际模型难以获取,本文按照表1给出的一步加减载特性和公式给出的燃气机组预期功率,建立简易的燃气机加减载函数,采用M函数编写并进行封装以生成Simulink模型。岸桥负载模型同样采用M函数编写,依据为某港口提供的单台岸桥单个电机运行数据,如图8所示。标题栏分别为运行过程、运行距离、用时、消耗功率、电机转速、输出转矩;数据栏为电机运行过程,分为九个过程,每个过程都分为加速(acc)、稳速(ss)和减速(dec)阶段,对应岸桥对集装箱的提升、平移和下放过程;表中相关符号DH,DT,TW1,TR等为自定义变量,无实际意义。通过表2中的用时和消耗功率这两列数据即可以得到单个电机的功率-时间曲线。
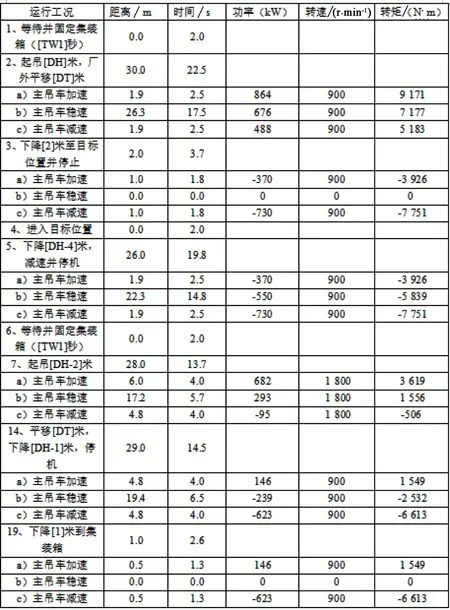
图8 单台岸桥单个电机运行数据
飞轮阵列模型有两个单元组成:1200kW和2 400kW单元,每个单元采用300kW为一个单机,4台单机组成1 200kW和8台单机组成2 400kW单元。每个300kW单机均采用经典的永磁同步电机矢量控制数学模型,由MATLAB自带的Simulink模块组成,其仿真模型如图9所示。

(a) 2 400 kW单元

(b) 300 kW单机
3.3 仿真结果
基于图8的单台岸桥单个电机数据,每台岸桥有两个电机组成,两台岸桥同频起动有四个电机同时运行,运行周期为82.8s。同时,选用四台1 800kW燃气发电机组,一步最大加减载能力为25%(即1 800kW),恢复周期为3s。为提高仿真效率,将仿真运行周期进行压缩,压缩比为1∶200,则一个仿真周期为0.414s,仿真总时长设为3s,燃气发电机一步加减载恢复时间0.015s。
将图8中功率数据乘以4,得到两台岸桥共四个电机负载的总功率曲线如图10所示。从曲线可看出,总仿真时长3s内包含8个运行周期,岸桥负载存在阶跃式功率冲击。
飞轮阵列系统按照设定控制算法进行充放电,功率为正则放电,为负则充电,以抵消部分负载消耗功率,削峰填谷,平抑燃气机组出力。如图11所示,Pr为飞轮阵列给定功率,Pm为实际输出功率,输出功率很好地跟踪给定功率。

图10 岸桥负载功率曲线
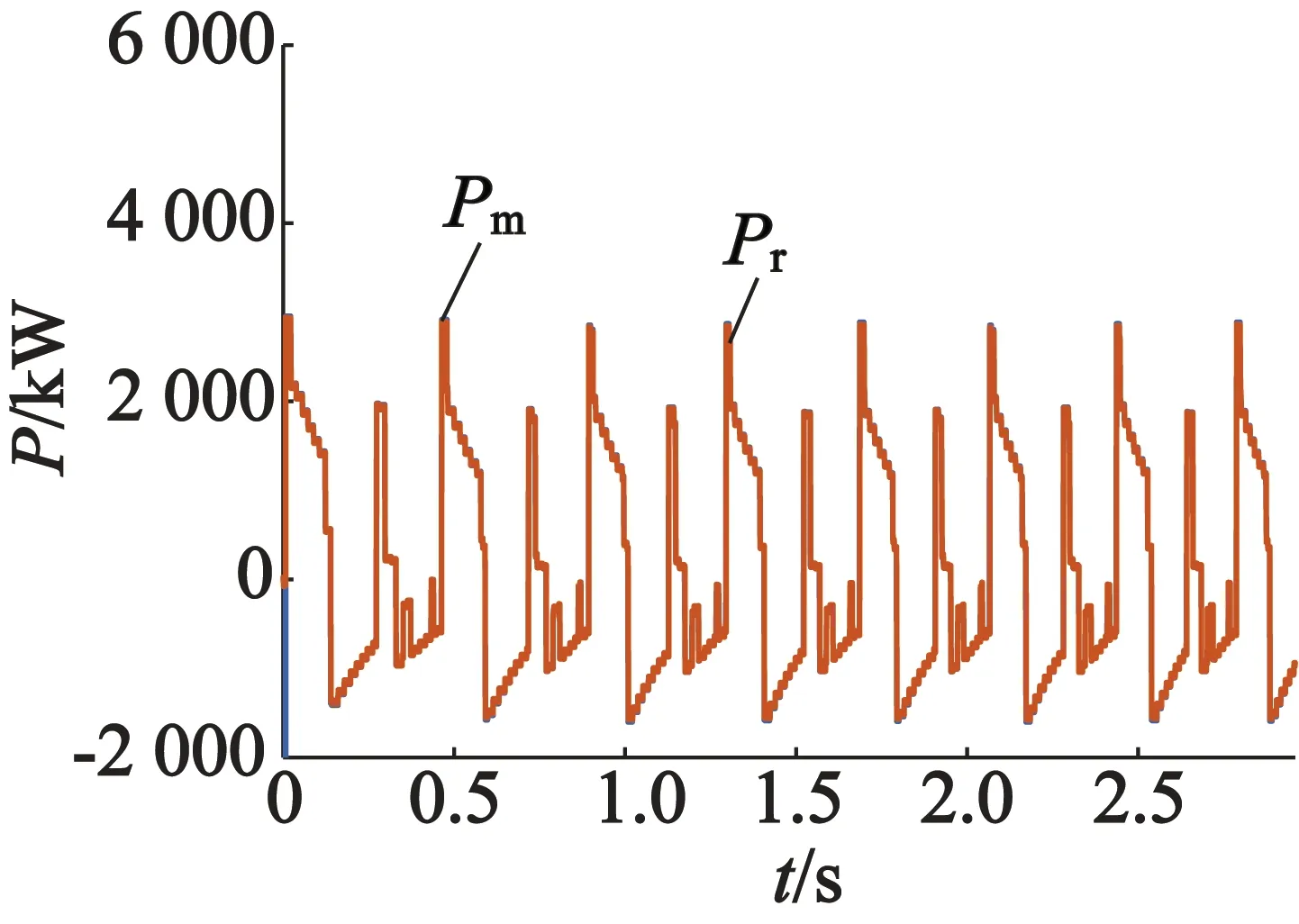
图11 飞轮给定和输出功率曲线
根据岸桥负载功率和飞轮阵列输出功率,得到燃气发电机组实际加减载曲线,如图12所示。从图12可以看出,燃气机组功率在500~1 800kW附近按小范围波动,每步加减载较上一次不超过500kW,完全满足燃气机组理想加载特性。
为对比明显,图13分别给出在仿真过程中负载、飞轮和燃气机组功率曲线,其中PL-m为负载功率,Pf-m为飞轮输出功率,Pg-m为燃气机组期望输出功率。从图13可以看出,存在负载冲击时,飞轮平抑多数负载功率突变,燃气机组保持在理想的功率范围。负载突加时,飞轮放电;负载突减时,飞轮以燃气机组功率充电,从而保证燃气机组平滑功率。
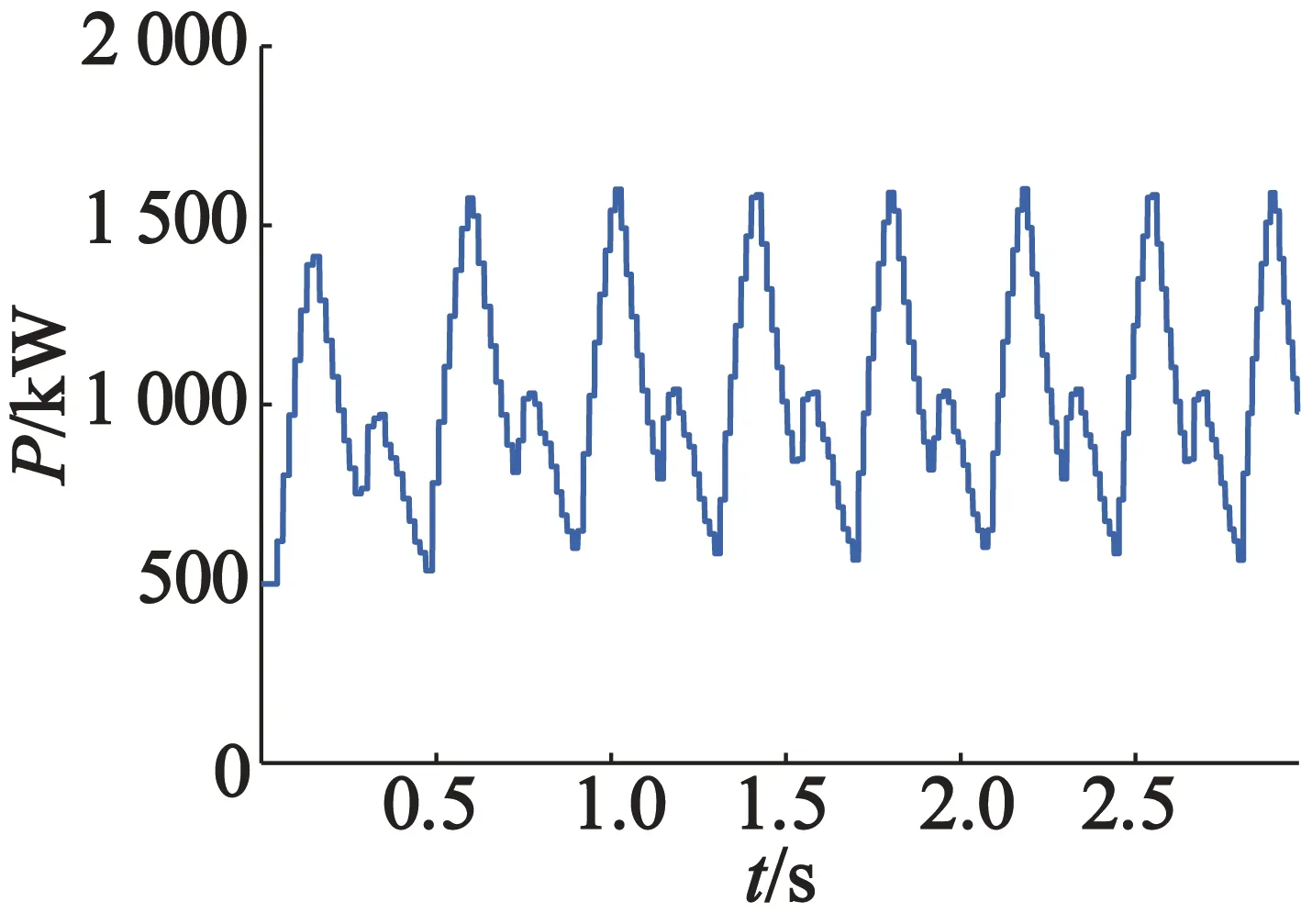
图12 燃气发电机组加载曲线

图13 飞轮阵列、岸桥和燃气机组功率曲线
同时,从飞轮阵列稳定运行方面,飞轮充电时电量增加,放电时电量降低,正常工作期望飞轮系统保持在中间电量运行,飞轮可以保持周期性充放电。图14为飞轮阵列总的剩余电量曲线,可以看出,飞轮阵列总的剩余电量保持在12~31kW·h范围,系统稳定运行。

图14 飞轮阵列总剩余电量曲线
从以上仿真结果可以看出,对于给定的两台岸桥同频起动工况,3 600kW飞轮阵列系统可完全补偿岸桥负载功率突变,燃气发电机组保持理想的一步加减载曲线,完全满足系统运行需要,从而验证了本文所述基于飞轮阵列的岸桥微网控制系统的有效性。
3.4 飞轮对拖实验验证
为了验证飞轮阵列系统的有效性,采用飞轮两两对拖控制方式进行充放电测试实验,一台飞轮充电(模拟负载冲击性负荷),另一台飞轮放电,以验证飞轮充放电响应时间、功率值和维持时间等性能指标。
以其中飞轮1和飞轮2对拖实验为例,飞轮1充电,飞轮2放电。具体控制过程:对拖控制之前,飞轮1和飞轮2分别充电至4 500r/min,10 500r/min;在t=49.056s时刻发送对拖控制指令,飞轮1接收到控制指令后以额定功率充电,飞轮2以额定功率放电。在t=79.056s时刻对拖结束,飞轮1充电至10 400r/min,飞轮2放电至4 500r/min。实验曲线分别如图15、图16所示,其中图15(a)为飞轮1充电功率和转矩曲线,15(b)为飞轮1充电转速曲线;图16(a)为飞轮2放电功率和转矩曲线,16(b)为飞轮2放电转速曲线,16(c)为飞轮2放电响应时间和控制信号曲线。
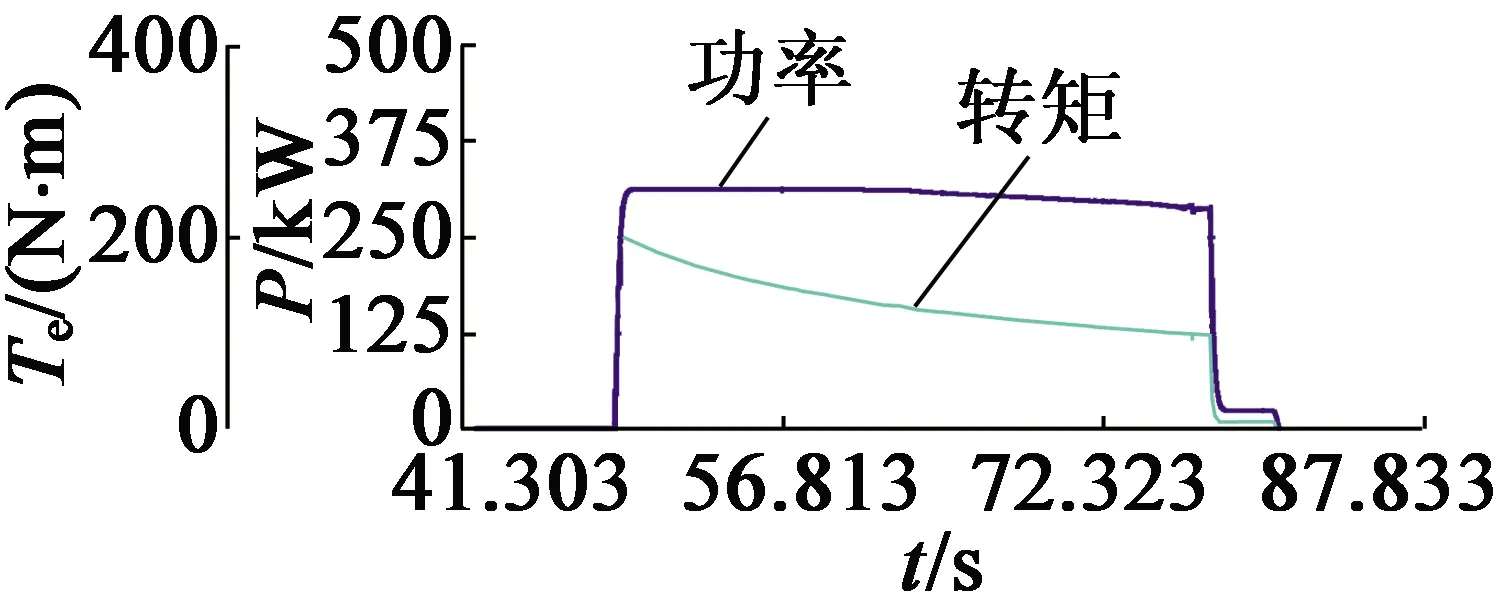
(a) 充电功率和转矩曲线

(b) 充电转速曲线
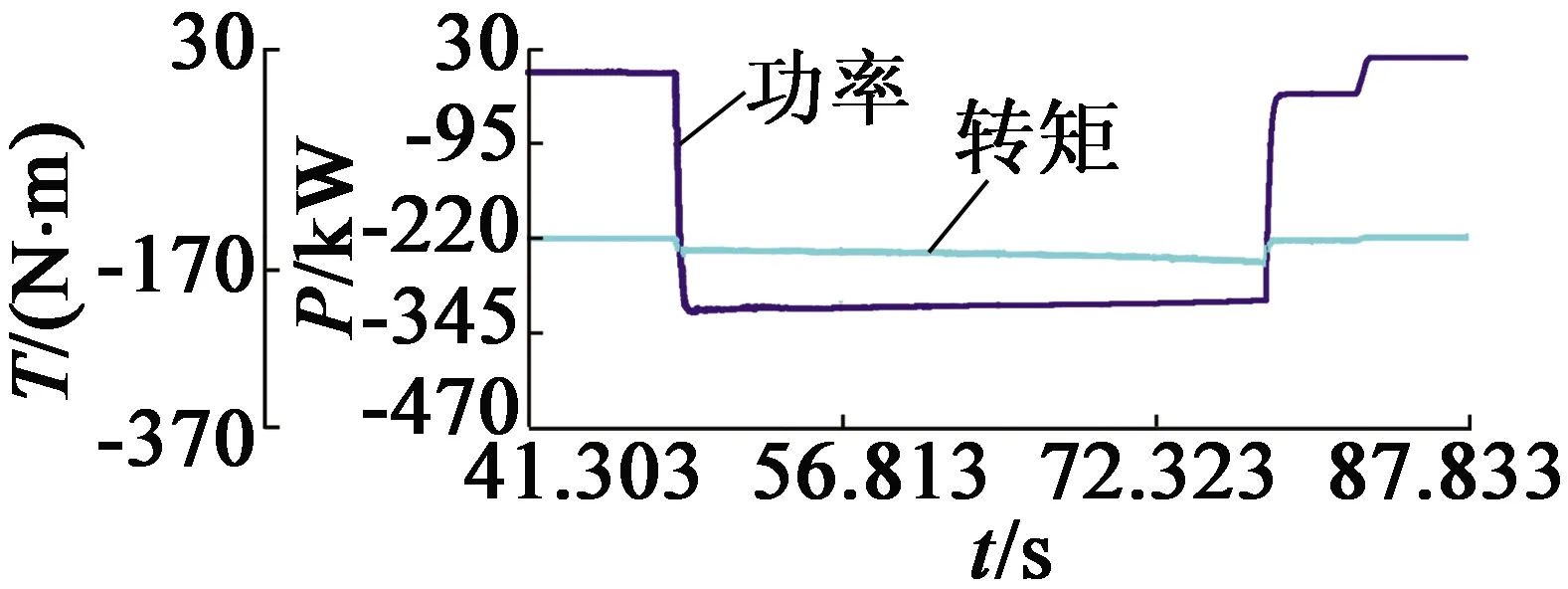
(a) 放电功率和转矩曲线

(b) 放电转速曲线

(c) 放电响应时间曲线
从图15、图16中可知,在接收到控制指令信号后,飞轮1功率迅速达到300kW,飞轮2功率迅速达到-300kW,总的充放电时间为30s,已远远大于岸桥冲击性负荷作用时间;图16(c)中飞轮2放电时刻坐标x1=49.056s,y1=3.14kW,达到满功率时刻坐标为x2=49.071s,y2=-307.35kW,即飞轮2从待机到满功率放电响应时间为15ms,远远小于燃气发电机组的3s恢复周期,可忽略不计。综上,飞轮单机以及阵列系统的充放电功率、响应时间和维持时间等性能指标均能满足所设计的岸桥微网控制系统需求。
4 结 语
本文将磁悬浮飞轮储能技术应用于港口岸桥平抑负荷冲击的领域,开展了基于飞轮阵列的岸桥微网控制系统建模与仿真研究。首先给出了岸桥微网控制系统的组成和工作原理,以及飞轮阵列系统的储能和释能过程,并据此对飞轮单机系统进行了数学建模。分别对岸桥负荷特性和燃气发电机组的加载特性进行了分析,对飞轮阵列的充放电控制策略进行了设计。最后,针对某港口具体运行数据搭建了Simulink仿真模型,并对两台岸桥同频起动工况进行了仿真分析,仿真结果表明了系统可稳定运行,加入飞轮阵列后可有效平抑岸桥负荷冲击对发电机组的影响,发电机组可按照理想的加载特性运行。同时,采用飞轮两两对拖控制方式对飞轮特性进行了充放电实验验证,结果表明,所采用的飞轮阵列系统的性能指标均能满足岸桥微网控制系统的需要。
猜你喜欢
现代电力(2022年2期)2022-05-23
新能源汽车供能技术(2021年1期)2021-10-14
飞控与探测(2021年2期)2021-08-12
能源工程(2021年3期)2021-08-05
控制与信息技术(2021年2期)2021-07-23
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
电子制作(2019年11期)2019-07-04
电子制作(2019年23期)2019-02-23
时代汽车(2018年12期)2018-06-18
