
变迎风面积载具运动轨迹及机构强度仿真研究
2020-07-15 14:37刘杰倪寿勇王志鹏
机械 2020年6期
刘杰,倪寿勇,王志鹏
变迎风面积载具运动轨迹及机构强度仿真研究
刘杰1,倪寿勇1,王志鹏2
(1.南京工业职业技术大学,江苏 南京 210023;2.桂林电子科技大学 机电工程学院,广西 桂林 541004)
针对一种发射后展开的变连杆机构载具,通过改变载具迎风面积,将其运动过程分为两个阶段,分别建立了不同的运动轨迹方程,通过初速度、射角以及迎风面积影响因素对载具的运动轨迹进行研究。迎风面积越小,其运动轨迹越接近抛物线,最大射角接近45°,随着迎风面积的增大,水平速度越小,载具落点或射程逐渐减小,最大射角逐渐减小前移。运用Flow Simulation流体仿真模块,对载具展开的结构流场进行了流体仿真分析,同时对载具的流场速度、流体密度进行了分析。将流畅仿真计算提取的阻力通过流构耦合方式添加至载具结构的静应力单元,对载具的关键结构并进行静力学分析,其中包含应力、应变及形变位移量,根据各个部件所选的材料,验证了零部件强度能够满足载具的发射展开时要求。
载具;展开机构;运动轨迹;流体仿真;静力分析
对于管径类以一定初速度发射的无动力推进载具,除了部分载具的旋转稳定尾翼弹出外,大部分在整个运动过程中基本保持外形结构面,即迎风面积不变[1-3]。目前,对于一般工程领域里的飞行中变迎风面积载具的运动轨迹研究涉及甚少,原因在于载具变胞机构设计比较复杂、迎风面积不定或机构强度难以满足,从而导致载具投送不能到达目标位置[4-9]。
本研究针对一种发射后展开的变连杆机构载具,运动过程中迎风面积会发生变化,可实现快速、准确到达目标位置。工作过程分两个阶段,第一阶段载具呈闭合的流线弹体型轮廓,如图1(a)所示,利用管径类发射装置将其以一定的初速度推出,在到达最高点时,来流推动扇叶旋转,扭矩通过传动链到丝杠驱动承载叶片展开,此时载具机构的迎风面积增加,同时风阻迅速增大,如图1(b),第二阶段可视载具做平抛运动,载具在水平方向上速度迅速下降至零,重力方向速度逐渐减小至平稳匀速降落着地,减小冲击以保证载具和轻质载荷安全。
因载具运动过程中存在两个阶段,每个阶段具有不同的迎风面积,因此,需要建立不同的运动轨迹方程。考虑到不同的发射初速度、射角、迎风面积以及平抛速度,还需讨论相关变量之间的关系。另外,在飞行流场作用下,风阻及重力矩对机构的结构强度存在影响,需要进行流场仿真得到阻力大小,并通过流构耦合方式加载到载具结构的静应力单元上,来校核载具在展开状态下关键结构位置是否超过材料屈服极限或满足强度要求。
1 变迎风面积载具运动轨迹计算
针对载具运动过程存在变结构工作方式,先将运动轨迹分成两个阶段,载具在闭合状态下飞行至最高点,然后载具的展开机构打开,进入平抛运动方式,接下来建立合理的简化运动轨迹模型。

图1 载具闭合及展开结构状态
近距离快速投送中,所研究载具的平抛水平速度低于0.3马赫数,根据流体伯努利方程可得:

式中:为马赫数;为声速,m/s;为大气压力,Pa;为流体密度,kg/m³。
式中:为载具迎风面积,m2;为载具与空气相对运动速度,m/s;为空气阻力拟合系数,数值大小视载具速度及外形而定。
载具在运动过程中的第一阶段,未展开投影迎风面积为0.02 m2,进入第二阶段,载具的承载叶片完全展开时其投影迎风面积为0.22 m2,同时辅助小型减速伞装置,可使得减速面积从0.24 m2升至10.24 m2。根据上述实际运动过程描述,建立简化的考虑风阻的飞行模型,载具运动轨迹如图2所示[7]。
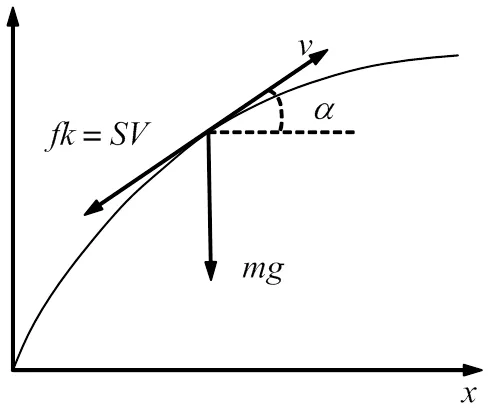
图2 载具运动轨迹
建立列出载具的运动轨迹方程式,在轴方向上有:
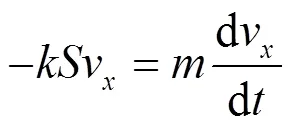
在轴方向上有:
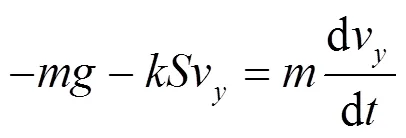
式中:为载具质量,kg;为中立加速度,m/s2;为时间,s。


对式(5)和式(6)进行积分,可得载具斜抛运动在方向与方向的位移方程为:

当方向的速度为0时,载具达到最高点:

将式(7)、式(8)消去时间,可得到载具斜抛运动轨迹方程:
式中:负号均与速度方向相反;为射角,°。
当载具运动到最高点时,风罩脱离,扇叶产生扭矩带动丝杠螺母推动载具的承载叶迅速完全展开,然后通过载具的机械限位和棘轮机构的锁紧,防止反转,依靠迎风面积增大,风阻骤然增大,从而减小了载具的降落速度。
设定射角为30°;载具平抛水平速度为100 m/s,载具质量为25.66 kg,第一阶段载具为流线型闭合状态,迎风面积不变;第二阶段设置多种不同的迎风面积,即Î(0.02, 0.24, 2.24, 5.24, 10.24),可提供不同的射程和着地速度。
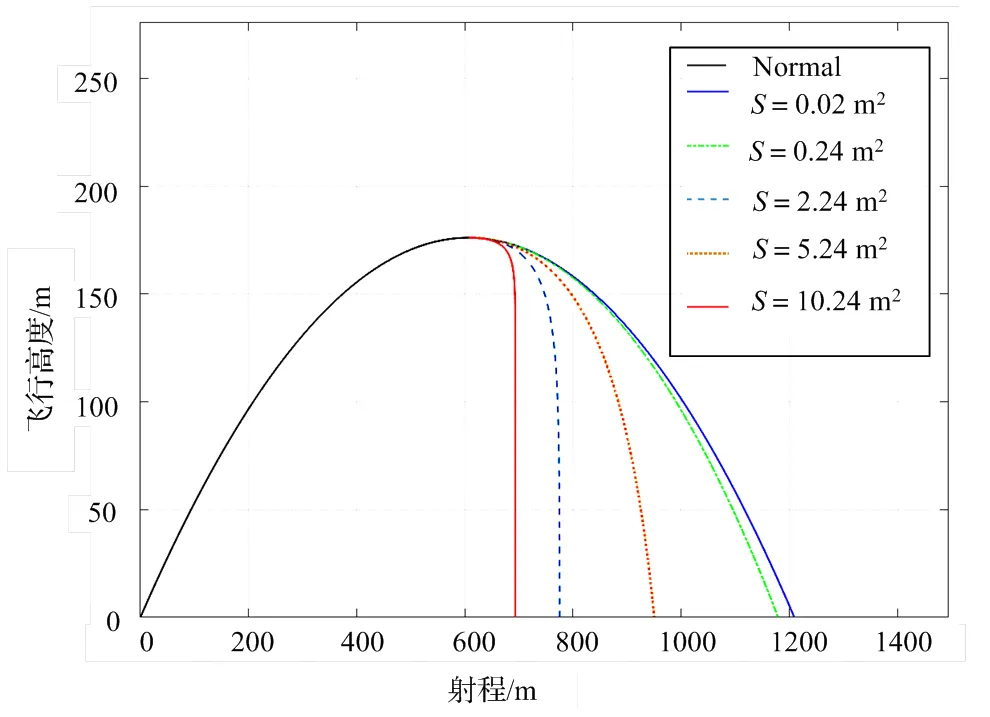
图3 第二阶段不同迎风面积下的运动轨迹
如图3,可知迎风面积越小,其运动轨迹越接近于抛物线形式,随着迎风面积的增大,水平速度越小,载具落点或射程逐渐减小,当整个载具的迎风面积增大至10.24 m2时,载具水平速度在最高点飞行约100 m后骤减至0,开始进入垂直匀速下降过程。
如图4所示,在保持相同的射角30°和迎风面积5.24 m2下,初速度分别从60 m/s增加至108 m/s,此时运动轨迹显示出存在一定的相似性关系;当进入垂直匀速降落时,在各个运动轨迹下着地速度基本保持不变,维持在15 m/s左右,说明各个降落轨迹在垂直降落过程中达到平衡,当迎风面积增加至10.24 m2时,各个轨迹着地速度基本维持在7 m/s左右。
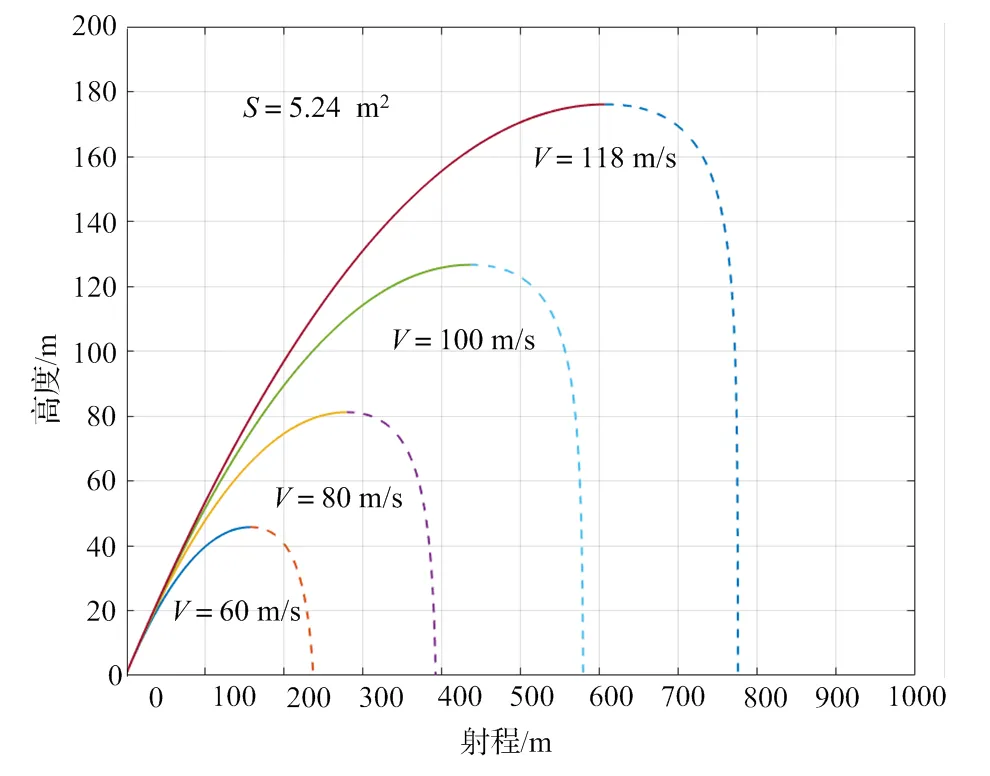
图4 不同初速度下的射程和飞行距离的关系
在第二阶段初始位置,即最高点,均保持载具展开状态和迎风面积为5.24 m2的平抛速度为100 m/s的条件下,选择不同的射角及初速度,来分析其对运动轨迹的影响,如图5,可见各个运动轨迹的最高点到着地点的水平距离2相同,除了第一个1,由其存在发射角小导致提前着地,从而水平距离1小于2。
从图6可知,载具平抛水平速度为100 m/s不变,通过改变迎风面积,得到射角和射程的关系。从变化趋势来看,迎风面积越小,其运动轨迹越接近抛物线,最大射角接近45°,随着迎风面积增加,最大射角逐渐减小前移,各个迎风面积分别对应的最大射角依次为44°、40°、24°、17°以及11°,所提取的数据可为载具的运动轨迹及射程的优化提供参考和依据。
2 载具完全展开流场计算
采用Flow simulation流体仿真模块,利用计算流体动力学(CFD)技术计算CAD模型内外的流体状况[12-13]。建立流场模型,添加边界条件,来流速度100 m/s,设置重力项以及定义空气介质等。
图5 不同射角和初速度下的轨迹
图6 射角和射程之间的关系
2.1 理论方程
纳维-斯托克斯方程(Navier-Stokes equations)为描述粘性不可压缩流体动量守恒的运动方程,简称N-S方程。Flow Simulation通过迭代求解非稳态N-S方程来计算结果,其矢量方程为:

直角坐标方程为:

式中:Δ为拉普拉斯算子;、、为流体在时刻点(,,)处的速度分量,m/s;、、为外力的分量,Pa;为动力粘性系数,N·s/m2。
2.2 计算结果
此次流体仿真计算结束后,其各目标的收敛情况如图7所示。标准化标度数值低于1.0说明计算逐渐收敛,越趋近于0,越说明计算过程完成并收敛,输出计算数值角度而言可信,否则不予置信;在经过50次左右迭代以后,所设置的各个目标全部收敛计算完成。

图7 载具展开阶段目标收敛
载具前视基准面上的流体速度分布如图8所示,因为载具完全展开时的速度为100 m/s,所以流体速度经过载荷叶片后有所下降。在靠近载荷叶片表面的位置还同时存在一些小涡流,扇叶旋转面切线叶尖速度较高,明显高于来流速度,载荷叶片前的气流流场较为平稳,无大尺寸湍流或漩涡,从而减小振动响应和保证具有较好的稳定性。
载具前视基准面上的流体密度分布,如图9所示。可以看出载具周围的流体密度相对于仿真环境的密度有所下降,因为流体经过载具后,速度下降,对流体的压力变小,导致流体的密度变小。
图8 前视基准面流体速度分布
图9 前视基准面流体密度分布
2.3 载具完全展开阶段静力学分析
静力学分析针对载具机构关键部位零部件的位移、应变和应力分布。本次分析应用Simulation的静应力分析模块[14],分析载具的承载叶片完全展开时,整个载具的机构是否发生断裂、屈曲、大变形和位移等情况。载具关键部位结构对应的材料参数如表1所示。

表1 关键零部件材料表
载具的在飞行的过程中受到风阻与重力的作用,载具完全展开是载具承载叶片受到最大风阻的情况,计算此时承载叶片、丝杠、连杆以及动力扇叶等零部件对应的应力、应变及形变位移。把载具的完全打开瞬间(来流速度为100 m/s)流体仿真数据,通过流构耦合方式[12]导入到Simulation中,如图10所示。
载具完全展开时,各零部件的应力分布云图如图11所示。载具的受力部位应力最大出现在零部件为连杆与连杆支撑的位置,可达443 MPa,其中承载叶片载具合页部位等部位的应力达到40 MPa左右,连杆所使用的材料为合金钢(Stainless Steel),其屈服强度为620.42 MPa,承载叶片所使用的材料为201.0-T6绝缘成型铸件,其屈服强度为349 MPa。均低于极限值的27%和88%,因此确保结构强度的要求,对于扇叶叶片强度而言,其最大应力值出现在叶片径向根部,其值远远小于所用材料的屈服极限。
载具的各零部件的位移情况,如图12所示。从图中可以看出在水平方向上的承载叶片的位移最大,承载叶片完全展开时,所形成的外伸梁结构中,其末端的位移最大为8.3 mm,对于载具前端的扇叶,其叶片径向外端出现形变位移最大值约为2.4 mm,产生瞬间的微小形变,为可接受的弹性变形,在可接受的范围内,因此可忽略不计。
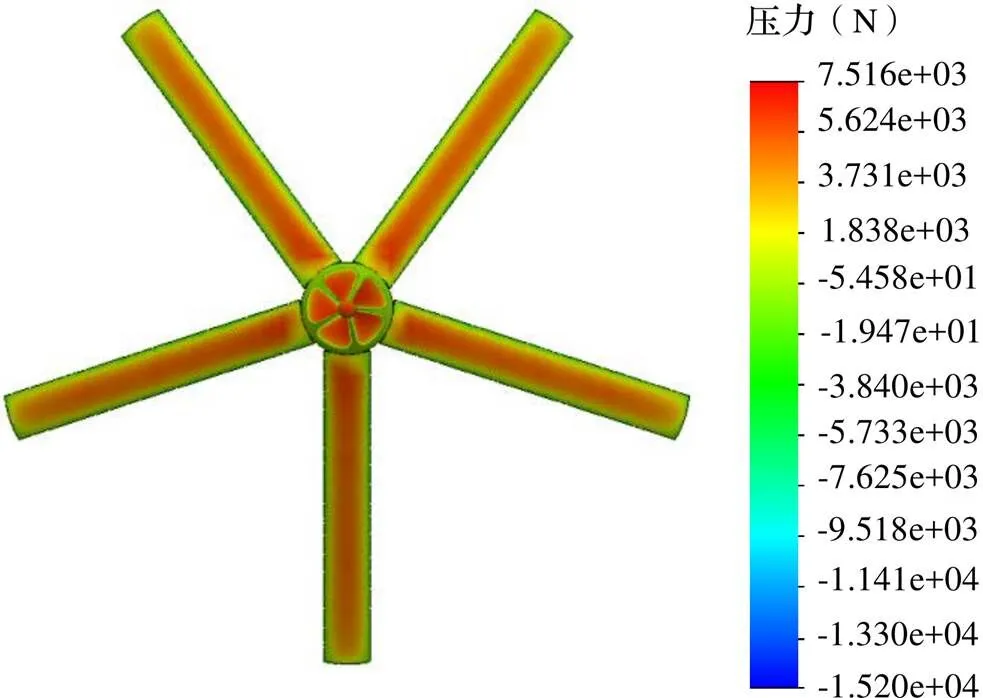
图10 单元液压分布图
3 结论
针对一种发射后展开的变连杆机构载具,将其运动过程分为两个阶段,分别建立了不同的运动轨迹方程。通过初速度、射角以及迎风面积影响因素对其轨迹进行研究。利用流体仿真,得到流场仿真得到阻力,通过流构耦合方式添加至载具结构的静应力单元并进行静力学分析。
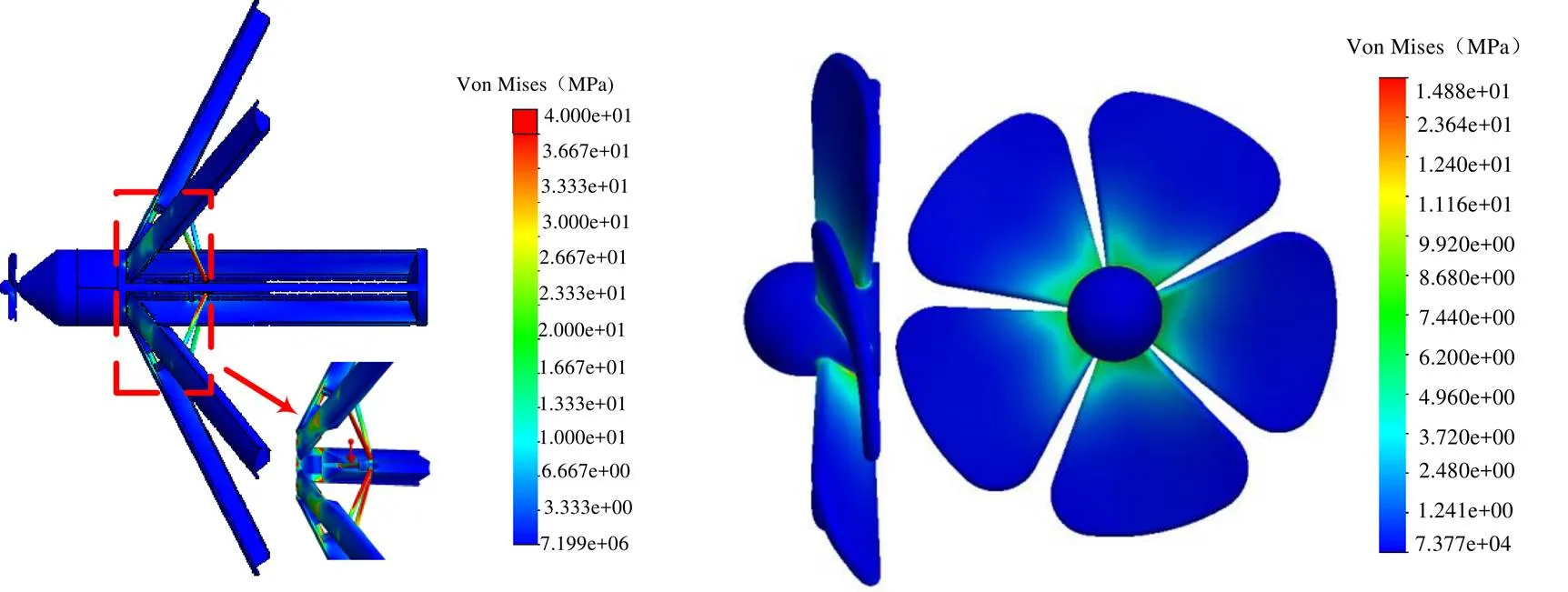
图11 动力扇叶Von mises应力正视图及局部应力图
(1)迎风面积越小,其运动轨迹越接近于抛物线形式,随着迎风面积的增大,水平速度越小,载具落点或射程逐渐减小,并进入垂直匀速下降过程。
(2)通过改变迎风面积,得到射角和射程的关系。迎风面积越小,其运动轨迹越接近抛物线,最大射角接近45°,随着迎风面积增加,最大射角逐渐减小前移。
(3)载具的在100 m/s完全展开时,载具的受力部位应力最大出现在零部件为连杆与连杆支撑的位置,可达443 MPa,其中承载叶片载具合页部位等部位的应力达到40 MPa左右,但均低于极限值的27%和88%;承载叶片完全展开时,所形成的外伸梁结构中,其末端的位移最大为8.3 mm,叶片径向外端出现形变位移最大值约为2.4 mm,为可接受的弹性变形。

图12 动力扇叶位移图
[1]陈亮,刘荣忠,郭锐,等. 掠飞末敏弹滚转气动特性研究[J] .北京理工大学学报,2018,38(4):338-346.
[2]蒋涛. 单翼末敏弹动力学及气动布局优化设计[D]. 南京:南京理工大学,2017.
[3]马晓冬,郭锐,刘荣忠,等. 旋转伞-末敏子弹系统动力学建模与仿真[J]. 弹箭与制导学报,2015,35(6):33-36.
[4]赵磊,朱茂桃,徐晓明,等. 空气域与流体域耦合作用下双层电池包散热特性[J]. 北京航空航天大学学报,2019,45(1):200-211.
[5]王玉光,周茜,乔青峰,等. 基于空气流体动力学的高速列车制动盘散热性能模拟[J]. 计算机辅助工程,2016,25(1):25-28.
[6]闵永林,陈池. 两种空气阻力模型的抛射体飞行轨迹研究[J].装备制造技术,2009(12):15-17.
[7]许兆庆,吴军基,薛晓中. 巡飞弹扇式折叠翼结构优化研究[J].南京理工大学学报,2011,35(4):494-497.
[8]廖保全,冯金富,齐铎,等. 一种可变形跨介质航行器气动/水动特性分析[J]. 飞行力学,2016,34(3):44-47.
[9]李莉,任茶仙,张铎. 折叠翼机构展开动力学仿真及优化[J].强度与环境,2007(1):17-21.
[10]狄龙,张启迪. 存在空气阻力情况下的平抛运动轨迹研究[J].物理通报,2014(1):56-57.
[11]郭雪鹏. 考虑空气阻力的斜抛运动研究[J]. 物理教学,2017,39(4):14-16.
[12]侯国渊. 行车小车行走及旋转机构强度校核[J]. 机械,2017,44(10):75-77.
[13]Jayakiran Reddy E,Pandu Rangadu V. Development of knowledge based parametric CAD modeling system for spur gear: An approach[J]. Alexandria Engineering Journal,2018,57(4):3139-3149.
[14]黄栋,郭伟科,刘辉,等. 基于CFD的自冷高速电主轴风扇叶片性能研究[J]. 机械,2018,45(11):37-41.
Simulation Study of Vehicle Motion Track and Mechanism Strength with Variable Windward Area
LIU Jie1,NI Shouyong1,WANG Zhipeng2
( 1.Nanjing Insititute of Industry Technology, Nanjing 210023, China; 2. College of Mechanical and Electrical Engineering, Guilin University of Electronic Technology, Guilin 541004, China )
For a kind of launch vehicle with variable link mechanism, the motion process of the vehicle is divided into two stages by changing the windward area, and different motion trajectory equations are established respectively. The motion trajectory of the vehicle is studied by the factors of initial velocity, angle and windward area. The smaller the windward area is, the closer the trajectory is to the parabola, and the maximum angle is close to 45°. With the increase of the windward area, the smaller the horizontal velocity is, the smaller the falling point or range of the vehicle is, and the smaller the maximum angle of fire is. The flow simulation module is used to simulate the structure flow field of the vehicle, and analyze the velocity and density of the flow field of the vehicle. The resistance extracted from fluent simulation calculation is added to the static stress element of vehicle structure through fluid structure coupling method, and the key structure of vehicle is analyzed and statics is carried out, including stress, strain and deformation displacement. According to the materials selected by each component, the strength of components can meet the requirements of vehicle launching.
vehicle;unfolding mechanism;trajectory;fluid simulation;static analysis
TP391
A
10.3969/j.issn.1006-0316.2020.06.004
1006-0316 (2020) 06-0025-07
2020-02-24
广西科技基地和人才专项(2018AD19078);江苏省高等学校自然科学研究项目(17KJB460007);南京工业职业技术大学科研基金项目(YK17-01-01,YK18-01-09)
刘杰(1988-),男,山东东营人,博士研究生,讲师,主要研究方向为机械设计及推进技术,Email:2019101054@niit.edu.cn。
猜你喜欢
科技信息·学术版(2021年20期)2021-11-02
宁夏工程技术(2021年2期)2021-07-30
初中生学习指导·提升版(2020年6期)2020-09-10
探测与控制学报(2020年4期)2020-09-02
新媒体研究(2020年23期)2020-04-01
艺术科技(2019年15期)2019-11-23
制造技术与机床(2018年10期)2018-10-13
科技创新与应用(2018年3期)2018-01-24
中北大学学报(自然科学版)(2016年4期)2016-08-05
科学中国人(2015年17期)2015-06-08
