一种折叠式农用无人机设计与实现
2020-07-23 08:57杨信锟李慧蓉周钰源许家钦
武夷学院学报 2020年6期
杨信锟,张 倩,李慧蓉,周钰源,许家钦
(武夷学院 机电工程学院,福建 武夷山 354300)
近年来我国高效机械化防治技术得到了较快发展,但对于占全国粮食种植面积60%以上的水稻、玉米等高秆作物来说,还是远远不足,因此开展农用轻型无人机施药技术装备与服务体系研究和服务具有十分重要的意义[1-2]。
1 植保无人机
1.1 国内外的发展
我国对无人机的研究始于2004年,但是由于空域的限制没有得到充分的发展。直到2010年国家出台了相关的政策,放开了1 000 m以下的飞行空间供给民用。同年我国第一架植保无人机下线,同时国内的不少研究机构、高校实验室和一些相关的企业也增加了对植保无人机的研发投入。2010—2013年期间大多数的植保无人机主要的动力以油动为主,结构多为单旋翼的无人植保直升机。其操作难度大、价格相对昂贵且对作业地形要求较高,在障碍物多地形复杂的环境下难以展开作业。2013年,以锂电池作为动力的电动植保无人机逐渐出现在市场上,以多个电机作为驱动的多旋翼结构相比于单旋翼的结构在造型上可以更做得更简约轻便,由此以电动电机驱动多旋翼成为了植保无人机的发展方向。
国外运用植保无人机的国家主要有美国、日本和韩国等农业现代化、自动化程度较高的国家。美国早期的植保喷洒作业主要是通过需要人驾驶的飞机,随着其无人机技术的快速进步以及大型集约化的种植模式推广,植保无人机得到了快速的发展。目前美国的植保机已发展到20多种,主要以单旋翼的植保无人直升机为主,占世界植保机的28%。日本的植保机发展也相当的领先,从1990年日本雅马哈公司就推出了R-50型植保机,载药量达20 kg,发展至今日本的植保机保有量已达3 000多架,同时凭借着其产品的载重大,性能优越被许多亚洲国家引进。韩国对于植保机的应用相对比较晚,自2003年起开始从日本等国家引进了植保无人机,不到十年就引进了500多架植保机。
1.2 植保无人机分类
植保无人机可以按照其动力来源和螺旋桨数量两种方式来分类。按照动力来源可分为:油动植保无人机、油电混动植保无人机、电动植保无人机。
按照螺旋桨数量可分为:单旋翼植保无人机和多旋翼植保无人机。单旋翼植保无人机的动力来源只有一只主螺旋桨,需要尾桨来保持平衡和水平飞行。其主桨控制前进后退、上升或下降,尾桨控制其转向。有两只及以上螺旋桨的无人机称为多旋翼植保无人机。常见的多旋翼植保无人机多为四、六、八旋翼的植保无人机,因其一个旋翼对应一个轴,所以又可称为四、六、八轴植保机。此类的植保无人机操作相对简便因此在市场上能更好的被接受。
2 设备的主要构成
2.1 脚架系统组成
如图1起落架是农用无人机着陆时,整个飞行器重量的承受部件,因此必须确保起落架有足够的支撑强度和良好的减震功能,以避免农用无人机降落时地面冲击对机体部件的损坏[3]。
该脚架系统采用碳纤维管作为主要支撑,铝合金件连接及固定碳纤维管及药壶,结构紧凑、稳定同时控制了脚架的整体重量。其中下碳板、下盖、支撑碳管、底部碳管、加固U铝及海绵垫可以自主加工,脚架固定件、药壶固定件、10 L药壶和脚架三通需要的加工设备要求较高无法自主加工。

图1 脚架结构Fig.1 Scaffold structure
2.2 主要构成部件设计
(1)下碳板设计:下碳板作为机架与脚架的连接板需要承受巨大的力,因此采用具有良好刚性及韧性的碳纤维板材。安装在下碳板上的主要部件有D30管座四个,分电板一块,以及八根铜柱和八个螺丝。
(2)下盖设计:下盖采用3D打印成型如图2所示,设计尺寸为290 mm×290 mm×28 mm,底部采用加强筋设计提高整体结构刚性侧壁也添加了肋板防止3D打印完侧壁受力毁坏。底部开口为电源线出口,一侧有凹槽主要设计目的是放置LED信号灯。4边角45°裁切并做半圆弧处理用来配合碳管的放置。左右两侧各开两个M3的螺丝柱,使用M3自攻螺丝既可将上下壳缩紧。主要受力连接处为左右底部的4组2×φ2螺丝孔,通过内六角头的M3×12螺丝与加固U铝和脚架固定件连接。底部筋条处的八个M3孔位为底部碳板与加固U铝连接的过度孔,起垫片作用。
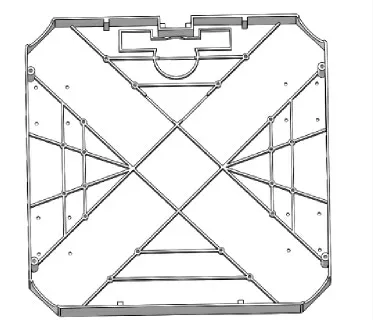
图2 下盖三维模型Fig.2 3D model of lower cover
(3)加固U铝设计:根据脚架连接件的端面尺寸选定加固U铝原材料的尺寸为底宽50 mm、边高10 mm、壁厚为1 mm、内径50 mm。该部件主要连接左右两端的8个孔,用于连接脚架固定件与下壳,中间上下的四个孔,将下碳板固定在U铝上。其重量较重,在不影响结构刚性的情况下对其进行了镂空处理。长度尺寸不能超过下盖的长度290 mm,同时要满足孔位的要求,长度定为280 mm,如图3所示。
加固U铝的加工用三轴精雕机即可完成,通过Artcam编程软件,将加固U铝的平面DXF图纸导入。该部件需要铣两边轮廓以及内部孔位和镂空部分,因此采用两段程序编写,使用6 mm的端面铣刀来进行两边轮廓的加工和内部镂空的加工,用3.2 mm钻头加工12个3.2 mm孔。
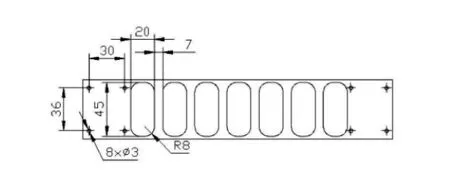
图3 加固U铝Fig.3 Strengthening U aluminum
(4)支撑管及海绵套选型:脚架的整体质量约为3.5 kg、药壶容量为10 L一组电池质量为2 kg,因此可得脚架系统的最大质量为15.5 kg。机架的总质量约为10kg,所以脚架支撑碳管静态所受的最大重量为25.5 kg。
海绵垫主要起减震作用,减轻植保机降落时机架受到的冲击力。根据底部碳管的半径,以及海绵套的常用规格选择内径20 mm、外径40 mm的海绵套为加工原材料。
2.3 其他部件选型
(1)药壶选型:目前植保机由于续航能力的原因大多载药量为10 kg,课题研究的八轴植保无人机载药量也定在10 kg。植保机药壶需要满足但不限于:具有防震荡结构设计;材料耐腐蚀、阳光曝晒;具有安装孔位,能安装在植保机上面;具有明显准确的刻度标识等。由于药壶的生产需要进行开模注塑,生产要求较高,因此课题使用的药壶采用直接购买市面上符合要求的产品。
(2)各连接件选型:支撑碳管与U铝及下盖的连接需要脚架连接件,药壶与支撑碳管的连接需要药壶固定件,支撑碳管与底部碳管的连接需要脚架三通。这些连接件的加工都比较复杂,现有的三轴精雕机无法满足加工要求,采用3D打印技术打印出来的连接件无法满足高强度的使用及高温。因此这三种连接件均直接采用现有的铝合金件,如图4所示的脚架连接件。

图4 脚架固定件Fig.4 Scaffold fixed parts
2.4 安装尺寸
起落架脚架结构如图5所示。
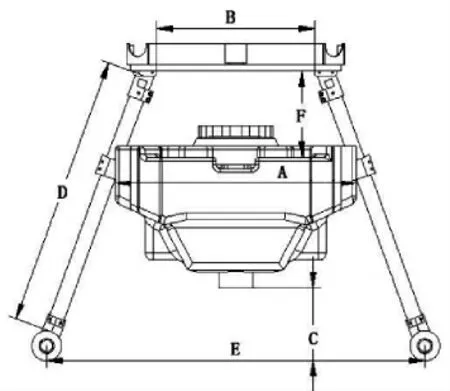
图5 脚架结构Fig.5 Scaffold structure
其中尺寸A为药壶安装孔尺寸、尺寸B为U铝安装孔尺寸、尺寸C为药壶离地尺寸。药壶的顶面内凹处用来放置电池,电池高为90 mm同时需要预留1/3的电池高度便于电池的放置,因此尺寸F为120 mm。尺寸A为药壶宽度,该长度为固定值320 mm。尺寸C为药壶底部的离地的距离,该尺寸应满足无人机在坑洼地带降落不会因药箱底部磕碰到石头或土堆导致侧翻,同时要保证重心位置因此该尺寸最佳在100 mm左右。加固U铝的长度280 mm,脚架加固件的端面长度为35 mm,尺寸B的大小为210 mm。尺寸D为支撑碳管的长度,该长度360 mm。
3 机架部件设计
3.1 折叠方案分析
农用无人机由于其载重量大,所以其尺寸一般都会比较庞大。对于植保作业人员来说一款好的农用无人机不仅要有较高的作业效率还要便于运输。因此植保机的折叠式设计显得尤其重要,课题研究的农用无人机也是基于折叠架构的一款八轴农用无人机。目前主流的折叠方式有管座下折方式,环抱折叠方式、以及Y型环抱折叠方式。综合对比3种方案后,课题采用第3种方案既Y型环抱折叠方案作为折叠设计方向。
Y型机臂的设计能提高载重量的同时减少对管座数量的要求,使得机架的中心结构不会因安装过多铝合金件而显得臃肿。使用扎带即可将机臂两两固定在一起,运输时能减少很多磕碰,机臂的下方空间可用来放置电池等配套物品。
3.2 折叠部件的设计
折叠部件采用Y型主要构成部分有固定件和转动件。固定件的大头端固定在从管座出来的机架主碳管上,另外两端连接转动件。为了提高折叠效率,转动件的固定采用卡扣式设计,通过按压销钉即可实现折叠,如图6。采用铝合金材质的原材料进行加工,有效提高了结构的刚性以及药液的抗腐蚀能力和抗变形能力。
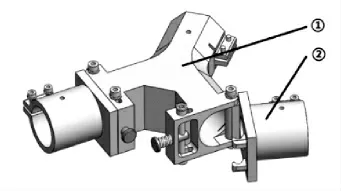
图6 折叠部件Fig.6 Folding parts
3.3 装配工艺
机架的整体装配如图7所示,其主要装备工艺有电机和折叠件的装配。
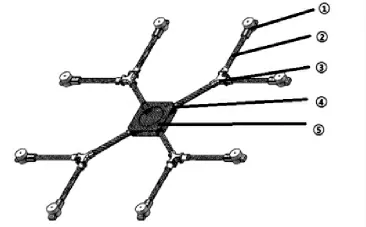
图7 机架装配体Fig.7 Frame assembly
4 外协部件的选型
4.1 飞行控制系统
飞行控制系统简称飞控,可以看作无人机的大脑。农用无人机的飞行、悬停、姿态变化等动作都是由飞控通过运算和判断下达对应的指令,由执行机构完成动作和飞行姿态的调整[4]。目前的飞控按照开放程度可分为开源飞控和非开源飞控,开源飞控的优点在于用户可以根据自己的需求对代码进行修改或增减,非开源飞控的优点是稳定好。博鹰PALADIN飞控的具有无线数传以及手机端调参的特色功能,对于实时状态监测有很好的帮助,同时具有全面的智能控制功能。所以综合性能及价格后,最终选定博鹰的PALADIN飞控。
4.2 动力系统
农用无人机的重量一般满载都在20 kg以上,因此对电机的要求也比较高,所以选用的电机要求拉力较大,性能稳定。目前市面上的符合这个要求的有好盈科技的X6、X8、大疆E5000等。课题的农用无人机设计为八轴,载重量为10 kg,质量在14 kg左右,因此平均每个电机需承受3 kg的拉力。考虑成本与性能,选择好盈的X6动力系统。
4.3 喷洒系统
植保机农药喷洒系统是一个独立的系统,由机载药箱、水泵、喷头、控制器等构成,专业的农业植保飞控通过连接控制器根据作业模式对喷洒药液的流量和速度进行控制[5]。药箱及飞控的型号已经选定,目前主要对该系统的水泵以及喷头模块进行选型,经过筛选选择目前效果比较好的EFT-3S无刷水泵。
5 设备调试
5.1 遥控器校准
遥控器校准:飞行器首次安装,接收机与遥控器对频成功后,飞控需要校准遥控器通道的最大值和最小值,保证遥控器信号输入的准确性。校准过程中,依次校准每一个遥杆。
5.2 电调校准
电调校准使得飞控输出的PWM值与电调可接收的PWM值范围匹配。校准方法[6]:
(1)将遥控器上电,油门推到最高位置;
(2)将飞控上电,飞行指示灯红蓝闪烁,表示飞控进入电调校准模式,飞控断电,遥控器油门始终保持最高位置;
(3)飞控重新上电,动力系统加电,当听到电调发出“嘀嘀”声后,迅速拉油门至最低,此时会听到一声长音“滴”,此时再推动油门,电机旋转,电调校准结束。
5.3 磁罗盘校准
(1)快速拨动“模式通道”开关6次以上进入磁罗盘水平校准模式[7];
(2)将飞行器水平并平缓旋转360°,待绿灯常亮,水平校准完成;
(3)飞行器头垂直向下,等待至红绿灯循环闪烁,表示进入磁罗盘垂直校准模式;
(4)将飞行器再次平缓的旋转360°,待状态指示灯停止闪烁,蓝灯常亮,垂直校准完成。
5.4 数据采集
装配完成后进行实际尺寸测量数据如表1所示。
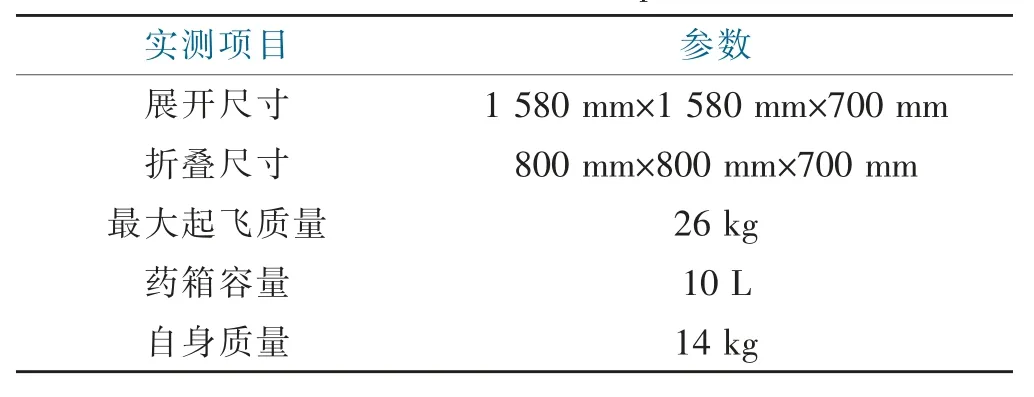
表1 实测尺寸参数Tab.1 Measured dimension parameters
实物拍摄图如图8所示。

图8 折叠实拍Fig.8 Folding real picture
在实际飞行中测试飞机的机架性能,以及飞行的精度误差。同时采集了以下数据,如表2所示。
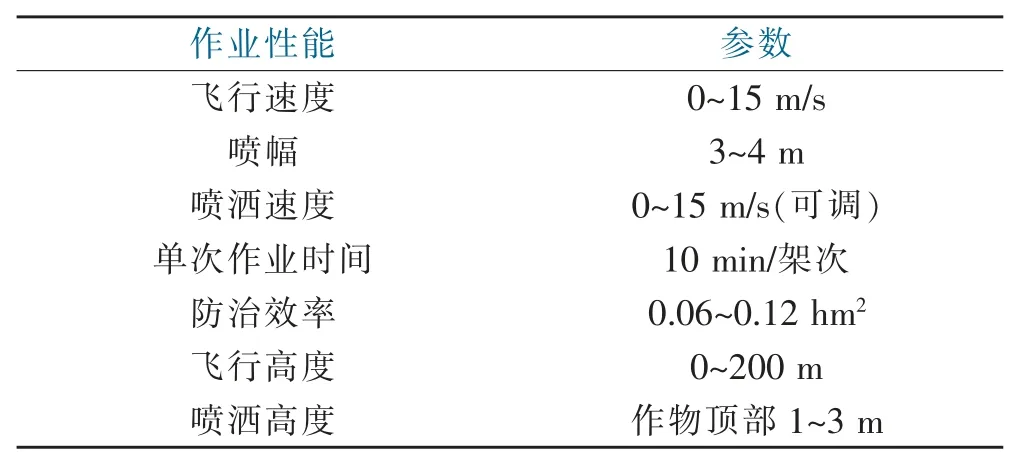
表2 作业性能参数Tab.2 Job performance parameters
实际作业情况如图9所示。

图9 作业实拍Fig.9 Actual shooting of operation
6 结论
折叠式农用无人机设计主要在植保机的脚架、机架与折叠部件这几个方面进行了详细的论证,并且经行分析与实际的测试。得出该折叠式农用无人机的整体结构刚性满足实际使用要求,折叠式设计大大减小了运输空间,喷洒系统的流量控制与喷洒幅度能在有效的减少病虫害的同时最大限度的减少对作物本身的伤害。在实际作业中一架次药水在6~8 min使用完,作业面积在0.3~0.4 hm2地左右。农用无人机在农业生产实践中发挥着关键作用,很大程度的提高农业生产效率。同时降低因喷洒农药导致的农药中毒事件发生,期望设计的折叠式农用无人机能继续在市场上接受检验。
猜你喜欢
世界农药(2020年9期)2020-12-23
党的生活(黑龙江)(2020年10期)2020-12-18
今日农业(2020年20期)2020-12-15
民用飞机设计与研究(2019年2期)2019-08-05
科技创新导报(2017年1期)2017-03-21
摄影之友(2016年8期)2016-05-14
摄影之友(2015年9期)2015-11-18
摄影世界(2015年1期)2015-03-16
轻兵器(2001年8期)2001-08-19
祝您健康(1985年3期)1985-12-30