
激光雷达对沉潜油探测的探索*
2020-07-28 09:16赵一鸣张玉石韩晓爽
遥测遥控 2020年2期
王 钰,赵一鸣,潘 超,张玉石,韩晓爽
激光雷达对沉潜油探测的探索*
王 钰,赵一鸣,潘 超,张玉石,韩晓爽
(北京遥测技术研究所 北京 100094)
目前,人们对于海洋沉潜油的规律研究及控制水平较低,特别是探测30m深度以内的浅海地区的沉潜油分布信息,其主要原因是缺乏快速有效的探测手段。北京遥测技术研究所开发水下探测激光雷达样机,利用激光在海水中良好的透过特性,用于对水下沉潜油的探测以及对海底等目标的高精度探测。样机完成在水池中进行水下沉潜油的模拟探测试验,对沉潜油样本的典型激光回波信号进行采集分析,并测量模拟探测深度。试验结果基本符合设计预期,为进一步提升激光雷达沉潜油探测能力打下良好基础。
激光雷达;沉潜油;水下探测
引 言
对水下溢油目标的探测是海洋研究获取重要目标信息的手段之一,在国民经济建设、海洋权益维护、国防建设和科学研究中具有重要的作用。目前,人们对于水下溢油的规律研究及控制水平较低,特别是探测30m深度以内的浅海地区水下溢油分布信息,其重要原因是缺乏快速有效的水下溢油探测手段。在海洋溢油探测激光雷达的设备研制方面,目前国内外的研究技术主要分为测深模式和激光激发荧光模式两类。
测深模式激光雷达通常应用于海底地形测绘,目前,世界上认可的成熟系统主要有美国的SHOALS(Scanned Hydrographic Operational Airborne Lidar Survey)系统等[1],从20世纪70年代开始,该系统已经形成了成熟的系列化产品,并进入了业务应用阶段。我国测深激光雷达系统研究从20世纪80年代末开始,主要单位有中科院上海光学精密机械研究所[2,3]以及北京遥测技术研究所等。其中上海光机所已经完成了两代机载激光测深系统的研制,并进行了机载航测试验,取得了较好的试验结果。
针对溢油、叶绿素等海洋表面目标的探测应用需求,研究人员开发出荧光激光雷达设备,其具有高效、实时、测量准确等优点,可以实现多种海洋参数的测量。国际上,美国NASA和NOAA联合研制了AOL(Airborne Oceanographic Lidar)系统[4],能够对海水中的叶绿素浓度和海洋油污染等进行探测;加拿大环境科学局等单位研制了机载海洋荧光激光雷达SLEAF(The Scanning Laser Environment Airborne Fluorosensor system)系统等[5]。国内方面,中国海洋大学进行了激光雷达海洋探测方面的多项研究,并研制了一套机载海洋荧光激光雷达系统用以测量海洋表层的叶绿素浓度[6]。
综上所述,针对海洋表面的溢油情况,荧光激光雷达的应用已经较为成熟。但是,其受限于工作原理,此类激光雷达设备通常无法对水下的沉潜油目标进行探测,也无法提供水下目标的垂直深度信息。而测深激光雷达只对回波信号的深度信息进行提取,不易对目标类型和形态进行识别。对于不同情况的海洋沉潜油探测需求,单独使用以上两种激光雷达设备均不能达到理想的效果。
本文针对已有的测深激光雷达及激光激发的荧光激光雷达在海洋溢油探测领域的应用限制,利用多通道全波形激光雷达对海洋沉潜油探测进行研究,期望能解决海洋沉潜油的快速探测识别问题,突破沉潜油探测激光雷达系统指标仿真、硬件设备研制、多通道激光雷达回波信号的信息提取及溢油目标识别等技术。
1 原理设计
1.1 系统原理设计
激光雷达利用激光在海水中良好的透过特性,通过测量目标后向散射回波光信号,实现对沉潜油、海底等目标的高精度探测。使一束激光从空气射至水面,经过折射后向下传播,到达水下目标表面时,会转化为向各向传播的散射光。其中,有一定比例的散射光沿着光束入射方向原路返回激光发射设备处,通过光电探测器将其接收,转换为电信号,然后对电信号进行读取、存储、计算等处理,即可实现对水下目标的探测。
在回波信号中,脉冲信号间的时间差代表了激光光子飞行的距离,可以通过计算处理得到目标的距离(深度)信息;脉冲信号的幅度代表了目标表面的后向散射率,可以得到目标的表面特征信息,实现分析分类目标的功能。对于多通道的激光雷达,不同目标在多通道中的激光回波信号特征不同,可以根据通道间回波信号的特定组合方式对目标类别进行标定识别,例如,通过同一波长的目标激光回波偏振信号区分泥沙、水草、溢油等不同种类目标。
在激光雷达的收发光路中,设置光学扫描装置,使激光雷达的探测光路能够覆盖至一定的区域范围,再通过搭载平台(船或飞机等)的移动,即能够实现沿平台的运动轨迹探测其水下范围的目标。由于激光雷达的回波信号提供了目标与设备间的距离信息,同时使用姿态测量及地理位置测量设备,提供激光的实时指向角度及精确的地理位置坐标数据,解算得到目标的三维位置坐标。对全部目标位置的坐标进行整体平滑处理,能够绘制出水下目标的三维位置图,通过对图中的目标进行分布测算,能够得到水下目标的尺寸及范围。
海洋探测激光雷达系统原理如图1所示。
1.2 水下沉潜油探测深度
通过对海洋探测激光雷达测距方程的仿真,得到水下沉潜油探测的理论深度。窄视场激光雷达水下探测方程如下式所示:


对于沉潜油探测激光雷达回波信号,各参数典型取值如表1所示。其中,根据文献[7]海盐引起海面气溶胶光学厚度,取四季平均值为0.033;沉潜油目标反射率参考文献[8]厚油膜532nm处光谱反射率,取值0.005。
经过仿真计算,30m深度的沉潜油目标激光回波信号光强度为bot=3.4771×10–8W。参考光电探测器光电灵敏度约为1.5×105A/W。
计算得到光电转换后的目标电流信号为5.216mA,参考光电探测器的暗电流约为1nA。所以,在不考虑水体散射、白天阳光散射等背景光的理想情况下,激光雷达可以探测到30m深度的沉潜油目标,而信号的信噪比取决于实际情况下的海水透明度情况、沉潜油目标的水下形态情况以及信号采集系统的电噪声情况等。
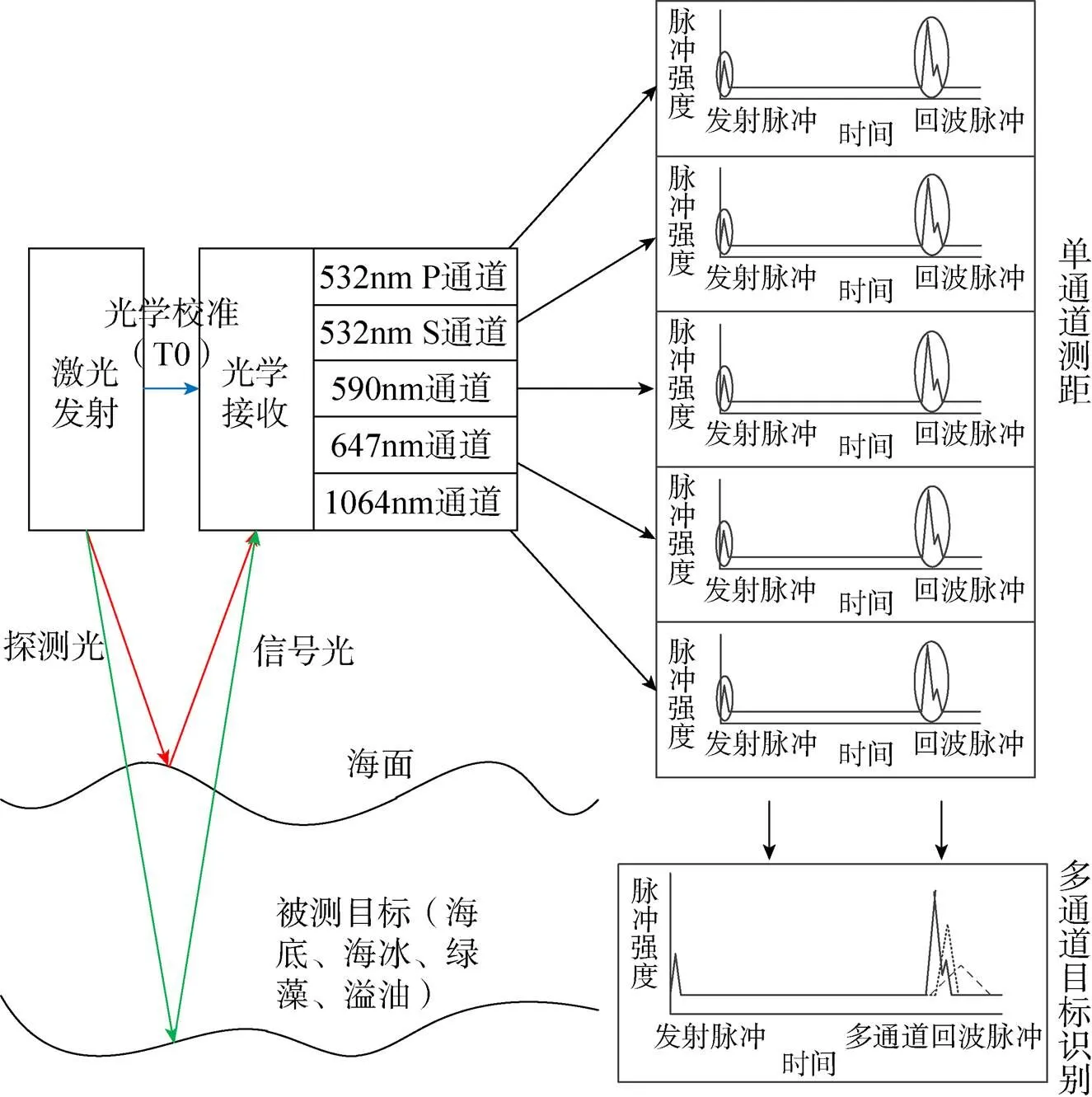
图1 海洋探测激光雷达原理图
1.3 水下沉潜油探测尺寸
激光雷达水下探测目标的最小尺寸取决于扫描脚点的分辨率,如图2所示。
激光水下扫描角约为17.28°,水下30m深度的扫描圆半径约为9.33m,圆周长度约为58.6m。由于光学扫描速度最快时对应最大的脚点间距,即由10kHz的激光重频及20Hz的最大扫描频率计算得到最大脚点间距约为11.7cm。考虑到水下激光光斑的发散特性,激光雷达可以探测到10cm尺寸的沉潜油目标。

表1 回波最弱时激光雷达方程各参数取值
2 详细设计
2.1 激光发射子系统
根据水下目标探测需求,要求发射激光波长位于520nm~550nm波段,同时要求激光光源具备大脉冲能量、较高激光重频、窄脉冲宽度等。激光发射子系统主要包括激光器、激光扩束装置、激光对中装置等,将532nm和1064nm波段的激光发射至海面,其中532nm波段的激光实现对海水的穿透、探测水下目标、并激发荧光信号;1064nm波段的激光用于海面高度信息的探测。双波长激光单脉冲能量超过1mJ,重复频率达到10kHz,采用全固态激光光路设计、全风冷制冷方式。
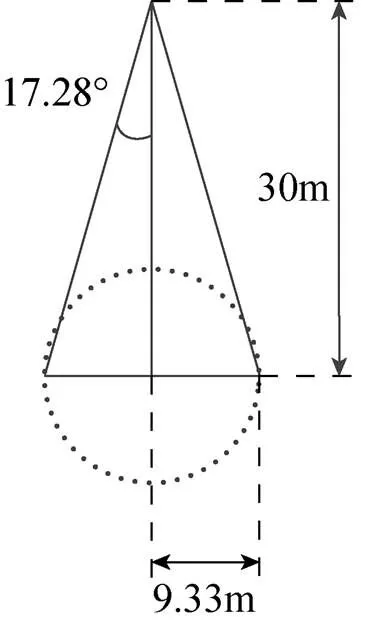
图2 激光扫描分辨率示意图
如图3所示,激光器光学系统采取了基于二极管端面泵浦Nd:YVO4的主振荡/功率放大器MOPA(Master Oscillator Power Amplifier)的方案,主要由主振荡器(种子源)、预放大器、功率放大器和倍频器四个单元组成,这四部分统称为激光光学模块LOM(Laser Optics Module)。主振荡器MO(Master Oscillator)提供高重频窄脉宽的种子激光;预放大Pre-A(Pre-Amplifier)以及功率放大PA(Power Amplifier)级均采用技术成熟、稳定可靠的二极管端面泵浦的Nd:YVO4晶体;倍频晶体采用空基激光器中广泛使用的高损伤阈值的I类相位匹配三硼酸锂晶体。

图3 激光器系统示意图
2.2 光学接收子系统
光学接收子系统实现对目标回波接收以及光束聚焦、窄带滤波、分光等处理,主要包括望远镜、光路准直装置、滤波装置、分光装置、聚焦装置、光电探测器等。光学接收处理子系统分为五个接收通道,分别为532nm P、532nm S、590nm、647nm和1064nm。其中532nm通道接收水下目标的回波信号,647nm通道只接收水分子的回波信号,1064nm通道接收海面的回波信号,实现对海面高度和水下目标的探测,通过目标的后向散射特性等特征进一步实现不同目标的区分。信号由高灵敏度的信号处理系统和处理软件处理,采用多通道1GHz的采样频率,实现高精度回波时刻测量和回波强度测量,并进行回波波形分析。如图4所示。

图4 光学接收子系统组成

图5 扫描光路示意图
2.3 光学扫描子系统
为了对比测量回波信号的幅度,系统工作过程中要求激光束相对于海面具有相同的入射角度。采用圆扫描的方式,保证激光入射角相同,并获得较高的扫描速度。扫描光路如图5所示,光学元件由扫描棱镜组成,其绕中心轴旋转,使由上方垂直入射的激光光束能够经棱镜偏折固定角度后向斜下方出射;同时,由下方同一角度返回的信号光能够沿棱镜阵列原路返回。
3 模拟试验
3.1 设备整机
完成后的激光雷达设备整机如图6所示,利用该设备,分别开展了垂直水槽和水平水槽中的溢油模拟探测试验。
3.2 垂直水槽探测试验
为了验证激光雷达探测沉潜油方案的可行性,在垂直水槽进行了原理试验,获取水下模拟目标的典型信号。测试目标样品分别选用泥沙(模拟水底回波信号)、水草(模拟绿藻信号)和海底溢油三种,如图7所示。
图6 设备整机图
图7下为试验样本激光雷达回波波形图,横坐标为时间,单位为纳秒(ns);绿色和蓝色曲线分别为532nm的P、S偏振通道回波信号;波形图中,最后一个波峰为目标样本的回波,前一个波峰为试验装置中水面的激光回波,回波图整体前面的波峰为激光雷达设备的内部散射回波,可以作为激光发射时刻的参考信号。目标的水下深度为

其中,为目标与水面的激光回波时间间隔,c为真空中光速,N为海水折射率。经计算,目标深度为水下2.68m,与现场实测水深一致。回波信号强度代表目标表面的反射率,P、S偏振通道的差别代表目标表面的消偏特性,目标表面粗糙程度与消偏度成正比,由于激光雷达出射激光为P偏振态,S偏振通道中回波越强即消偏度越高。由波形可以看出,泥沙、水草、溢油样本表面激光回波信号呈现出不同特征:泥沙表面粗糙度最高、消偏度很高,水草次之,而溢油目标表面光滑、消偏度很低。溢油表面反射率较低,激光回波信号幅值最小,激光雷达回波信号特征与样本表面目视特征一致。
3.3 水平水槽探测试验
在水平水槽进行了深度模拟探测试验,测试激光雷达最大探测深度。由于实际水槽的可用长度为20m,因此设计了光学折转光路,使激光光束在水下往返,实现超过30m的模拟水深测试,如图8所示。
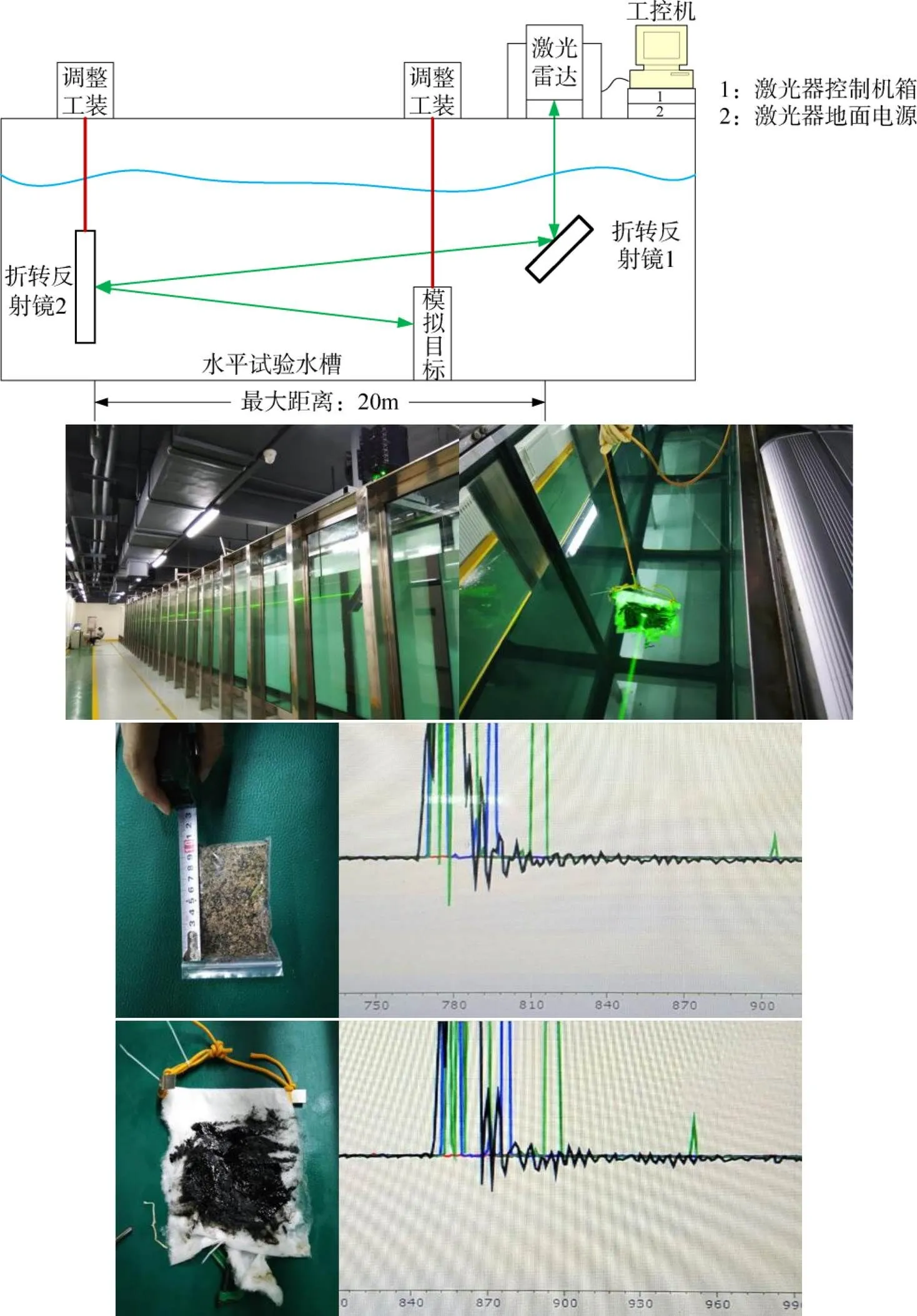
图8 水平水槽实验现场、样本及回波图
根据图8中的回波信号,由式(2)计算得出,泥沙模拟深度为水下10m,溢油模拟深度为水下6m,与现场实测距离一致。由于溢油表面反射率较低,其最大探测深度也较小。
3.4 试验结果
由于溢油与泥沙、水草的表面特征不同,其激光的后向散射率也不同,溢油及泥沙等物质呈现深色,对激光的吸收较强,其回波信号幅值较绿色的水草较低。在试验中,泥沙样本探测深度可以达到16m,沉潜油样本深度探测约为10m~12m;另一方面,由于沉潜油样本表面呈现为有一定光泽的较光滑表面,其对于532nm激光的消偏效果较泥沙的消偏效果小,通过532nm的P、S偏振通道信号可以判别,此特点可以在目标识别中加以利用。
4 结束语
试验结果表明,激光雷达可以实现对水下沉潜油的探测,但由于其表面后向散射率较低,实际探测深度较泥沙、水草等目标的探测深度小,可以通过水下范围扫描三维图分析并初步识别沉潜油。后续可以继续开展样机的船载海上试验,探索激光雷达发现、识别并测量沉潜油分布情况的能力,为进一步提升海洋沉潜油探测水平打下良好基础。
[1] TUELL G, JOONG Y P, AITKEN J, et al. SHOALS-enabled 3D benthic mapping[J]. Proceedings of SPIE, 2005: 816–826.
[2] 胡善江, 贺岩, 臧华国, 等. 新型机载激光测深系统及其飞行实验结果[J]. 中国激光, 2006, 33(9): 1163–1167. HU Shanjiang, HE Yan, ZANG Huaguo, et al. A new airborne laser bathymetry system and survey result[J]. Chinese Journal of Lasers. 2006, 33(9): 1163–1167.
[3] 胡善江, 贺岩, 陈卫标, 等. 机载双频激光雷达系统设计和研制[J]. 红外与激光工程, 2018, 47(9): 1–6. HU Shanjiang, HE Yan, CHEN Weibiao, et al. Design of airborne dual-frequency laser radar system[J]. Infrared and Laser Engineering. 2018, 47(9): 1–6.
[4] 赵朝方, 李晓龙, 马佑军. 多通道海洋荧光激光雷达溢油监测系统[J]. 红外与激光工程, 2011, 40(7): 1263–1269. ZHAO Chaofang, LI Xiaolong, MA Youjun. Multi-channel ocean fluorescence lidar system for oil spill monitoring[J]. Infrared and Laser Engineering, 2011, 40(7): 1263–1269.
[5] 李晓龙, 赵朝方, 齐敏军, 等. 多通道海洋激光雷达溢油监测系统高台实验分析[J]. 中国海洋大学学报, 2010, 40(8): 145–150. LI Xiaolong, ZHAO Chaofang, QI Minjun, et al. The experiment of multi-channel oceanographic laser remote sensing of oil spills system at high platform [J]. Periodical of Ocean University of China, 2010, 40(8): 145–150.
[6] 陈卫标, 吴东, 张亭禄, 等. 海洋表层叶绿素浓度的激光雷达测量方法和海上实验[J]. 海洋与湖沼, 1998, 29(3): 255–260. CHEN Weibiao, WU Dong, ZHANG Tinglu, et al. Method and experiment for measuring sea surface chlorophyll concentration using lidar[J]. Oceanologia et Limnologia Sinica, 1998, 29(3): 255–260.
[7] 张芝娟, 陈斌, 贾瑞, 等. 全球不同类型气溶胶光学厚度的时空分布特征[J]. 高原气象, 2019, 38(3): 660–672. ZHANG Zhijuan, CHEN Bin, JIA Rui, et al. Global spatial and temporal distribution of aerosol optical depth for different kinds of aerosols[J]. Plateau Meteorology, 2019, 38(3): 660–672.
[8] 陈应诚, 田庆久, 王晶晶, 等. 海面油膜光谱响应实验研究[J]. 科学通报, 2008, 53(3): 1085–1088.
Exploration of submerged oil detection by Lidar
WANG Yu, ZHAO Yiming, PAN Chao, ZHANG Yushi, HAN Xiaoshuang
(Beijing Research Institute of Telemetry, Beijing 100094, China)
At present, the level of ocean submerged oil research and control is still low, especially for detecting the distribution information of submerged oil within 30m, the main reason is the lack of fast and effective detection methods. The Beijing Research Institute of Telemetry developes a prototype of underwater detecting lidar, by using the good transmission characteristics of laser in seawater, it can be used for submerged oil detection, and for high-precision detection of other objects like seabed. The prototype carried out the simulated detection test of the submerged oil in the pool, collected and analyzed the typical laser echo signals of the samples, and measured depth. The results are basically in line with the designed expectations, which lays a good foundation for further improving the submerged oil detection capability of lidar.
Lidar; Submerged oil; Underwater detection
TN958.98
A
CN11-1780(2020)02-0036-07
国家重点研发计划(2016YFC1402300)
2020-03-25
Email:ycyk704@163.com
TEL:010-68382327 010-68382557
王 钰 1987年生,博士,高级工程师,主要研究方向为激光雷达光学系统设计。
赵一鸣 1983年生,博士,研究员,主要研究方向为激光雷达总体设计。
潘 超 1981年生,硕士,研究员,主要研究方向为激光雷达总体设计。
张玉石 1987年生,硕士,工程师,主要研究方向为激光雷达光机结构设计。
韩晓爽 1989年生,硕士,工程师,主要研究方向为激光雷达总体设计。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
海峡姐妹(2020年9期)2021-01-04
海洋通报(2020年2期)2020-09-04
海洋通报(2020年2期)2020-09-04
当代陕西(2019年10期)2019-06-03
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
海峡姐妹(2018年2期)2018-04-12
