煤矿主提升机制动控制系统的研究
2020-07-31 17:50张杰勋
机械管理开发 2020年6期
张杰勋
(晋煤集团长平公司机电工区, 山西 晋城 048411)
引言
提升机是用于联系地面和井下的通道,主要负责物料和人员的运输,是矿山核心设备之一,对确保煤矿运输安全具有十分重要的意义。矿井提升机在工作过程中主要采用恒压力制动的方式进行制动控制,但在特殊工况或者紧急制动的情况下,目前的控制方案存在着制动及时性差、速度慢的缺陷,给提升作业安全造成了一定的隐患,而且由于采用了开环控制模式、制动力矩恒定,无法根据运输工况进行灵活的调整,随着矿井提升作业向着高速、重载方向的发展,目前控制方案下提升机在运行过程中的震动、冲击现象越发严重,给煤矿的运输安全造成了严重的影响[1]。因此本文利用仿真分析系统对钢丝绳提升机的恒减速制动特性进行研究。
1 基于闭环控制的恒减速制动原理
提升机的恒减速制动系统的整体结构如图1 所示,该控制系统采用了双回路制动控制模式[2],能够有效提升子系统的制动安全性,同时在该制动系统中引入了闭环控制的逻辑,利用测速传感器实现对提升机提升滚筒运行速度的连续性监测,将监测结果实时传递到制动调节控制器内,从而实现对提升机提升速度的连续性闭环控制。为了满足在正常制动和紧急制动情况下的恒减速制动控制,建立了制动压力传感器和液压控制系统的电磁比例溢流阀之间的闭环调控逻辑[3],根据不同的控制需求实现对电磁比例溢流阀调整电磁信号的控制,满足对制动压力的调整,同时根据制动减速情况进一步地对电磁比例溢流阀的电磁控制信号进行反馈控制调整,实现恒减速制动控制,有效降低在制动过程中的稳定性,减少对提升机系统的冲击。

图1 基于闭环控制的恒减速制动原理
2 钢丝绳提升机仿真分析模型的建立
钢丝绳作为提升机的关键零件,其特性对矿井提升机的运行稳定性具有较大的影响,传统对钢丝绳的建模均采用了钢体建模方案,与实际差异性较大,为实现对提升机制动控制系统的有效控制,本文提出了一种新的开尔文钢丝绳建模方案,其结构模型如下页图2 所示[4]。
由图2 可知,该结构模型主要包括弹性元件和黏性元件构成,在外部提升平台重量M的作用下,弹性元件k和黏性元件b的应变一致,此情况下元件的总应力为弹性元件和黏性元件的应力和,可表示为[5]:

根据胡可定律可知:

图2 开尔文模型结构示意图
式中:ε 为钢丝绳应变量;εH为弹性元件应变量;εN为阻尼器的应变量;σ 为钢丝绳应力;σH为弹性元件应力;σN为阻尼器应力;k为弹性元件的刚度系数;b为黏性元件的阻尼系数。
通过对上式联合建立提升本构方程并求解,可获得钢丝绳在运动过程中的动力学方程为:
3 基于模糊PID 控制的制动特效仿真
利用SimulationX 仿真分析软件建立提升机提升控制系统的仿真分析模型,将钢丝绳在运动过程中的动力学方程带入到该仿真分析逻辑控制编辑器内,对钢丝绳在不同工况下的制动情况进行仿真分析,结果如图3 所示,图中速度1 表示采用模糊PID控制逻辑,速度2 表示采用传统的恒压力制动控制模式。
由图3 可知,该工况为提升机制动时的速度为10 m/s,负载重量为5 000 kg,制动时的制动减速度为1.25 m/s2,由仿真分析结果可知,当采用传统控制方案时,在制动瞬间速度出现了极大的波动,会使制动系统产生较大的冲击。当采用优化后的模糊PID控制时,制动时速度基本上无波动,能够有效提升提升机在制动过程中的稳定性和可靠性,增强提升机的使用寿命。
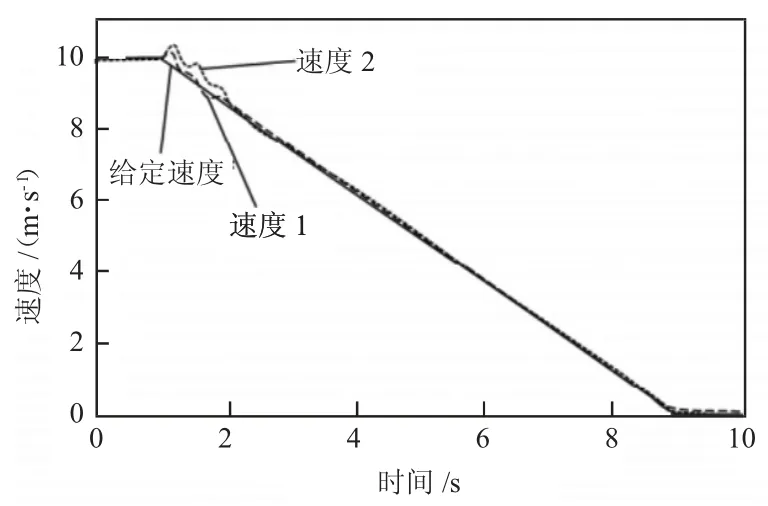
图3 不同控制特效下的制动性能曲线
4 结论
1)该控制系统采用了双回路制动控制模式,在该制动系统中引入了闭环控制的逻辑,利用测速传感器实现对提升机提升滚筒运行速度的连续性监测;
2)利用开尔文钢丝绳建模方案,建立钢丝绳运动时的动态模型,能够有效提升仿真分析结果的准确性;
3)用优化后的模糊PID 控制时,制动时速度基本上无波动,能够有效提升在制动过程中的稳定性和可靠性,增强提升机的使用寿命。
猜你喜欢
山东冶金(2022年4期)2022-09-14
北京航空航天大学学报(2022年5期)2022-06-06
电子乐园·上旬刊(2022年5期)2022-04-09
当代陕西(2019年14期)2019-08-26
传媒评论(2019年4期)2019-07-13
电子制作(2018年11期)2018-08-04
华人时刊(2017年17期)2017-11-09
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
中国高新技术企业(2015年13期)2015-04-30