
一款基于ARM嵌入式的机械臂的设计与实现
2020-08-04 09:50吴家合张玉薇朱庆红蓝祝愿方敏
数字技术与应用 2020年5期
吴家合 张玉薇 朱庆红 蓝祝愿 方敏
摘要:机械臂在当今的医疗、工业等方面起着重要作用,为使机械臂更加适用、灵活、易于控制,基于ARM,通过依赖于ARM架构与ESP8266WiFi模块以及各种模块,实现机械臂的动作以及对物件的抓持。利用DsP算法使采集的信号转换为PWM控制信号,采用消抖算法,从而达到械臂在运行中的高稳定性。本机械臂可提升控制精度以及灵活性、机械臂与程序功能的融合。
关键词:机械臂;ARM;灵活性;控制
中图分类号:TP393 文献标识码:A 文章编号:1007-9416(2020)05-0137-02
机械臂是一种可以通过编译软件程序来完成的自动设备,它渐渐具备了有人的视觉以及判断能力。在工作的过程中,机械臂的控制的准确性和对环境的适应性,使其在各个领域都有着广阔的发展前景。特别是高级的机械臂,可以执行更加复杂的任务。机械臂是当今科研领域及工业领域的研究前沿和热点,兼有人行为意识和机械手的作业效能,因此在军事、医疗、空间、工业等领域有着广泛的应用前景。在国外,工业机器人的发展已经较为成熟,并且得到了非常广泛的应用,在国内,机械臂的设计还处于—个模仿的阶段。目前在机械臂的应用中,对于机械还的操控多为按键控制或者需要多个控制杆来控制一个机械臂的运动,其设计繁琐,操作复杂,给操作者使用带来很大不便。针对上述问题,侧重研究基于ARM的机械臂,旨在提升机械臂的传输信息实时性与控制精度以及灵活性,促进机械臂与程序功能的融合。
1系统功能分析
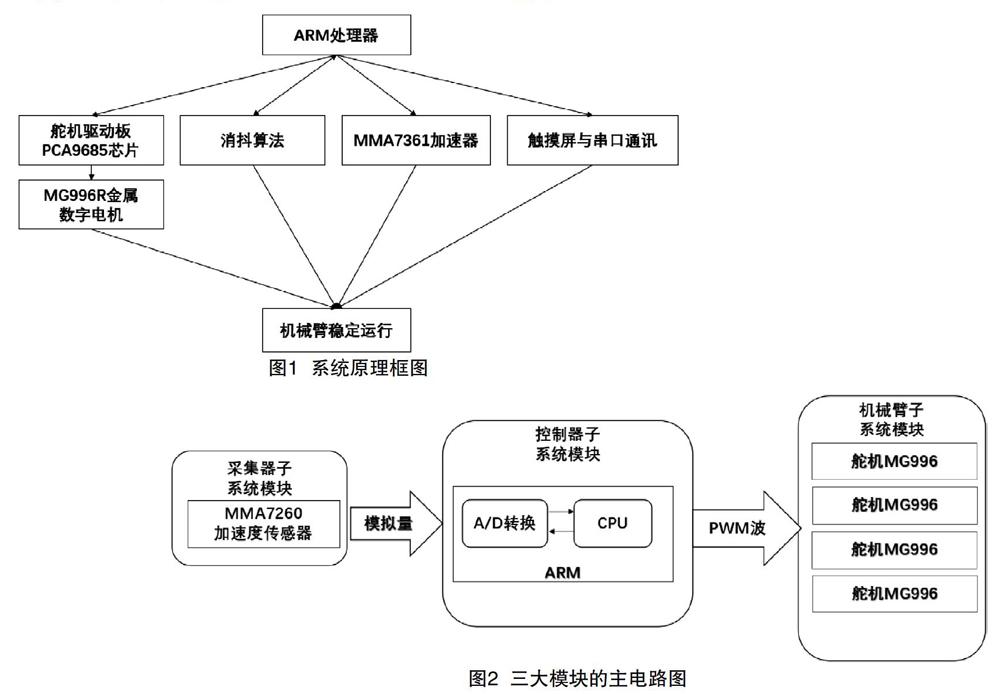
系统以ARM微型处理器架构为核心,以MG996R金属数字舵机、舵机驱动板PCA9685芯片、MMA7361三轴加速度传感器为主要外围元件,经A/D转换控制芯片采集相应的数字量信号,并编写控制算法程序调节输出PWM波的占空比,进而实现控制相应舵机运动的目的。通过CPU控制、三轴加速传感器对数据的采集以及消抖算法,使得机械臂的运行变得更加的稳定与协调,实现机械臂的灵活传动与自由制动。进而实现处理器架构与各模块之间功能。
2系统功能模块设计
在系统中,拟选择ARM作为主控单元,ARM可以使PwM信号的脉冲宽度实现微妙级的变化,从而提高舵机的转角精度。此舵机驱动板使用PCA9685芯片是16通道12bit,PWM舵机驱动,用两个引脚通过12C就可以驱动16个舵机。通过级联的方式最多级联62个驱动板,增强可扩展性,此外还解决驱动电路和控制电路隔离的问题。ARM再完成消抖控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件,所以受外界干扰较小,整个系统的工作性可靠,其原理框图如图1、图2所示。
系统利用触摸屏与串口通讯实现编译程序对机械臂的控制,实现操作者所输入编码的要求。再次根据机械臂控制系统的设计结构,以CPU为核心进行个模块问的总体设计,然后重点以协调为核心进行协控制器的功能和结构设计,分以下部分:舵机控制器模块、数据采集模块,并采用加速傳感器、仿真、已至加以实用。
3机械臂的软件设计
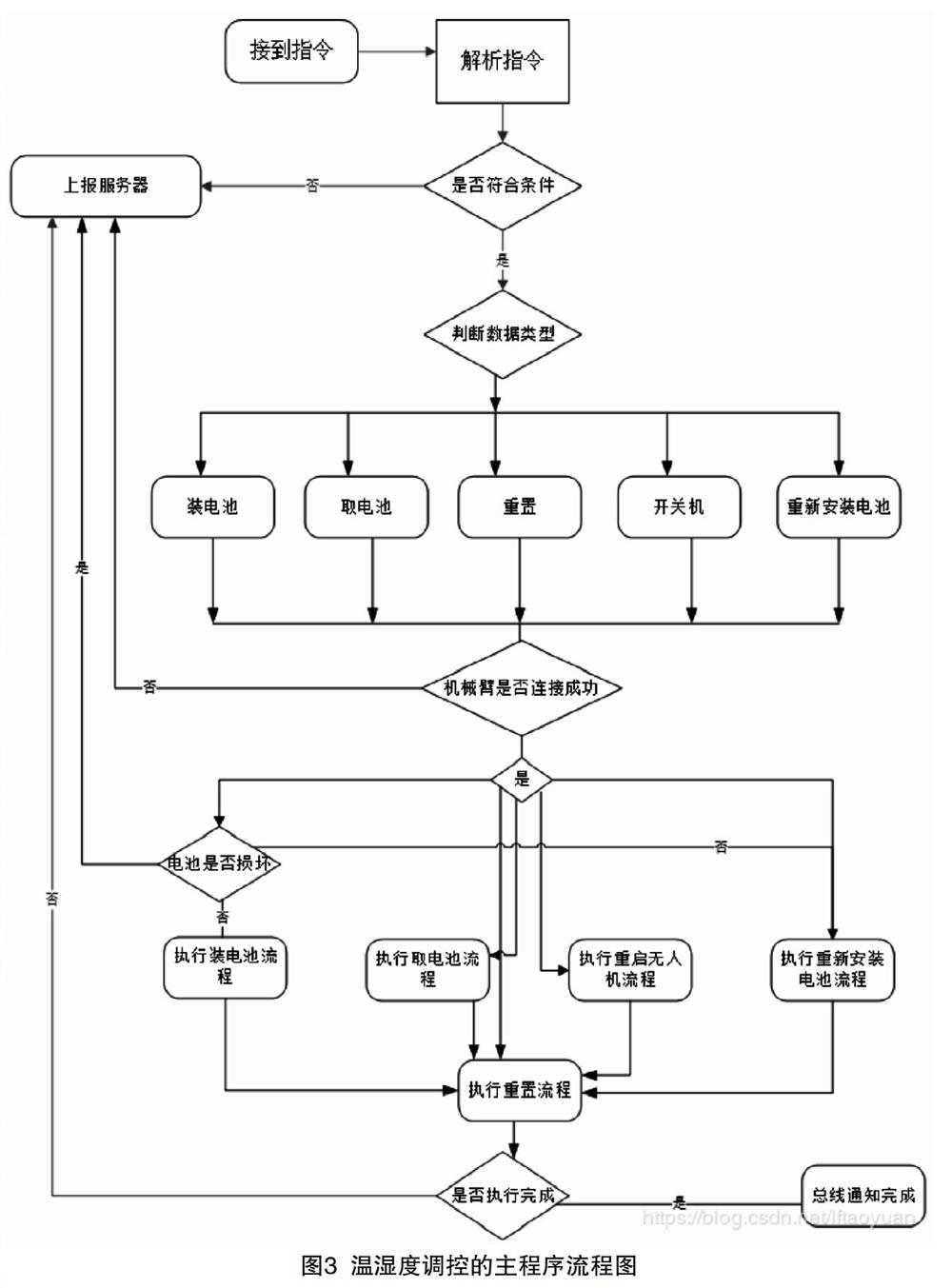
基于ARM的机械臂的软件测试,编译的主要环境是Windows7,选用的编程软件是KEIL5,通过输入一些关键的软件代码,通过串口烧录入硬件,实现我们的需要的功能。每一个模块都应该有一个属于自己模块的程序流程图,这样才能十分清晰的完成编译的目的,达到功能实现的效果。机械臂的主控制程序流程图详见图3所示。
4结语
基于ARM的机械臂综合多方的技术进行整合,依靠ESP8266 WiFi模块以及其他辅助模块,通过DSP算法使采集的信号转换为PWM控制信号,采用消抖算法,实现了机械臂的动作以及对物件的抓持机械臂夹持力度、通过算法保证工作的稳定性、提升控制精度以及灵活性、机械臂与程序功能的融合,以此达到其功能的实现。
猜你喜欢
河北电力技术(2021年2期)2021-07-29
制造技术与机床(2019年4期)2019-04-04
家庭影院技术(2018年11期)2019-01-21
计算机教育(2016年7期)2016-11-10
城市道桥与防洪(2013年9期)2013-03-11
