基于多无人机系统的编队包含控制
2020-08-19 07:27赵学远周绍磊王帅磊
计算机工程 2020年8期
赵学远,周绍磊,王帅磊,闫 实
(海军航空大学 控制工程系,山东 烟台 264001)
0 概述
随着通信技术、机器人技术以及无人飞行器和水下航行器技术的进步,多智能体系统的协同控制引起了人们的广泛关注[1-3]。作为协同控制的重要分支,研究人员分别对一致性问题、包含问题、编队控制问题进行了研究,如文献[4]研究了基于路径规划的多无人机系统编队控制问题,并给出了控制器的设计算法。一致性问题作为协同控制的基础组成部分,要求与多智能体状态达成一致[5-6]。
包含问题是指作为跟随者的智能体的每个状态量,由多个领导者对应状态量构成的凸包内变化。文献[7]依赖于邻居智能体信息设计了分布式一致性控制器,解决了连续时间和离散时间下多智能体系统的包含问题。文献[8]研究了有限时间内的拉格朗日多智能体系统的包含控制问题。但上述研究得出的结论是在领导者不进行通信的前提下得出的。
编队控制问题是指多智能体系统在控制器作用下形成预先给出的期望编队。近年来,将多智能体的一致性理论成果用于解决编队控制问题成为人们研究的热点[9-10]。文献[11]解决了具有双积分动力学系统模型的多智能体编队控制问题,并与之前在机器人领域界的研究方法进行了比较。文献[12]设计了基于事件触发机制下的控制器,节约了系统的通信带宽,同样实现了多智能体系统的编队控制。
编队包含控制问题作为以上两个问题的结合,要求领导者形成期望编队队形,而跟随者在所形成的编队内部运动,因此编队包含控制问题在有人机-无人机系统作战、多枚导弹协同突防等领域具有广泛的应用前景。而文献[13]仅研究多智能体的包含控制问题,领导者不能按照需求形成期望编队。目前也有部分文献解决了编队包含控制问题,如文献[14]提出多领导者能够形成期望编队,跟随者在编队构成的凸包内运动,但所采用方法过于复杂,需要求解多个复杂的线性矩阵不等式。总之,多数文献还只是研究编队控制问题或者包含控制问题,如文献[15-16]不存在多个领导者,且只是解决了多智能体系统的编队控制问题,未解决包含控制问题。而文献[7]则只是解决了包含控制问题,未涉及编队控制。但无论是编队控制问题还是包含控制问题,都可以看作是编队包含控制问题的特例,因此研究编队包含控制问题更具有实际意义。
本文研究了具有多领导者的多无人机系统编队包含控制问题,利用一般通信拓扑条件下Laplacian矩阵特殊性质,将编队包含控制问题化简为两个低阶子系统的渐进稳定性问题,以解决多无人机时变编队包含控制问题。
1 基础知识
为便于后文对多无人机系统编队包含控制的研究,给出部分需要用到的引理。
引理1如果有向图G包含一条有向生成树,则0是图G对应的Laplacian矩阵L的一个特征值,且1为特征值0对应的特征向量,其余N-1个特征值均具有正实部[17]。


特别地,如果0是Z的单特征根,则矩阵Y是列满秩的,矩阵EY的特征值是Z的非零特征值。
2 问题描述
考虑由N架无人机构成的多无人机系统,多无人机系统内部的通信结构描述为有向图G。本文主要研究多无人机的时变编队包含控制问题,故将单架无人机视为质点,第i架无人机的动力学系统模型描述为:
(1)


(2)

假设1为分析方便,假设无人机在三维空间内的运动相互解耦,那么在一维空间的结论可以顺利推广至三维空间。
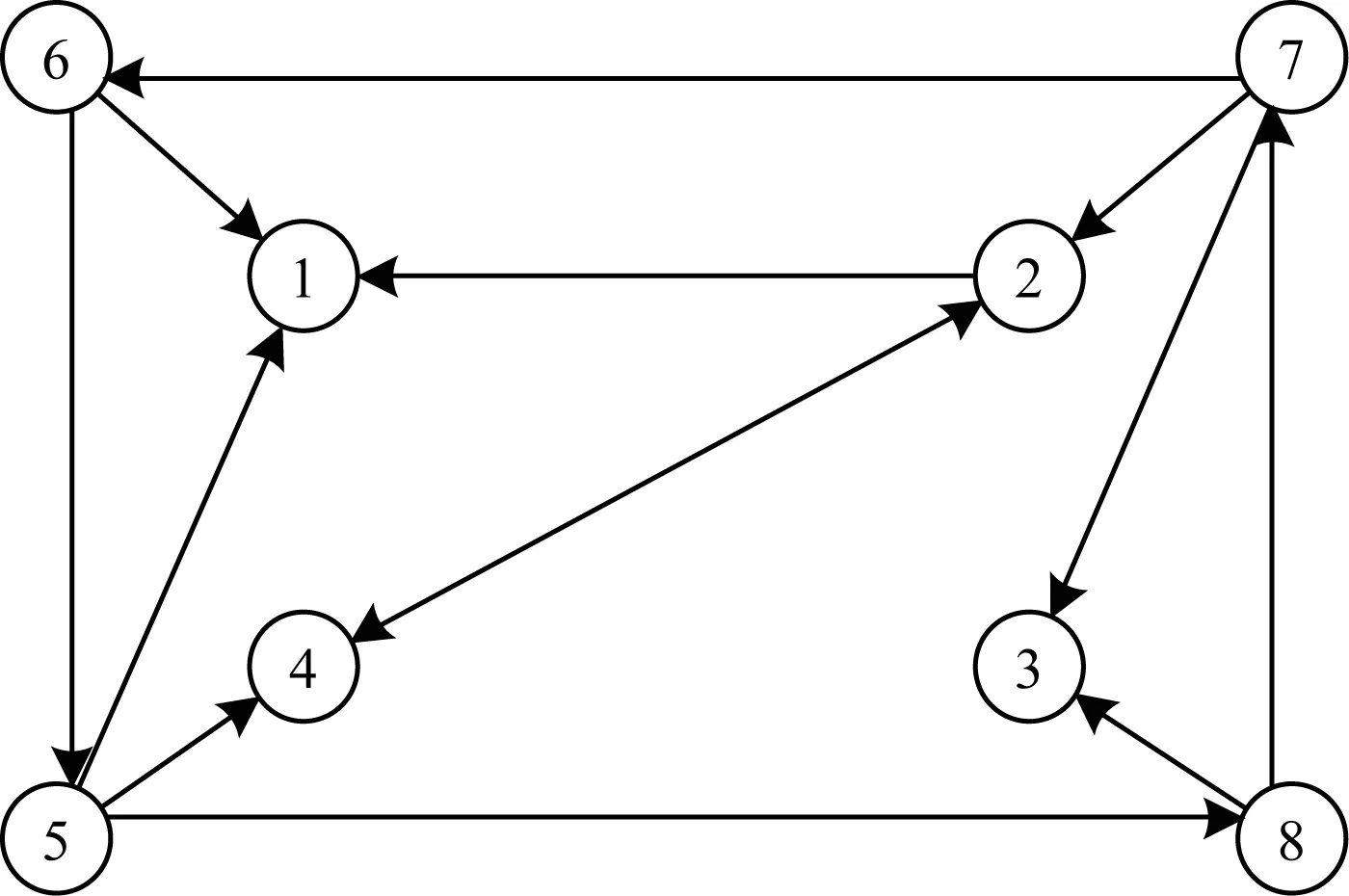
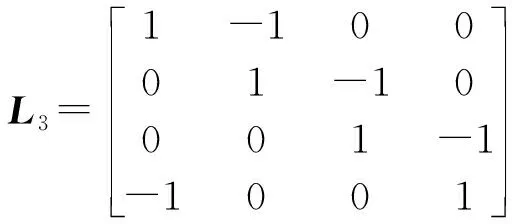
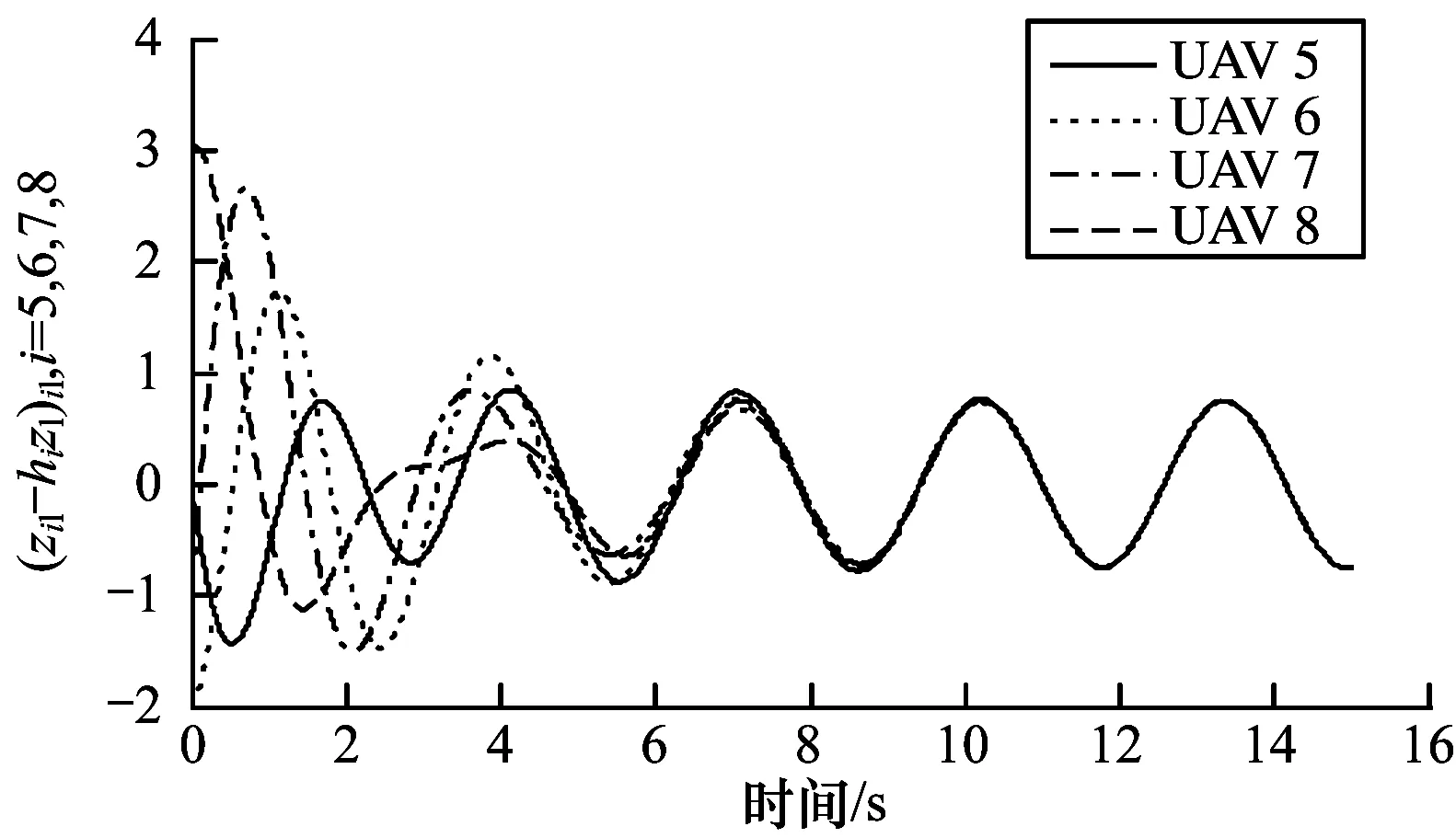
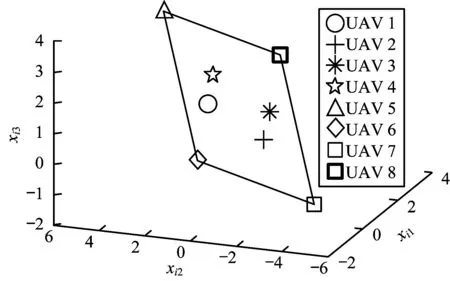
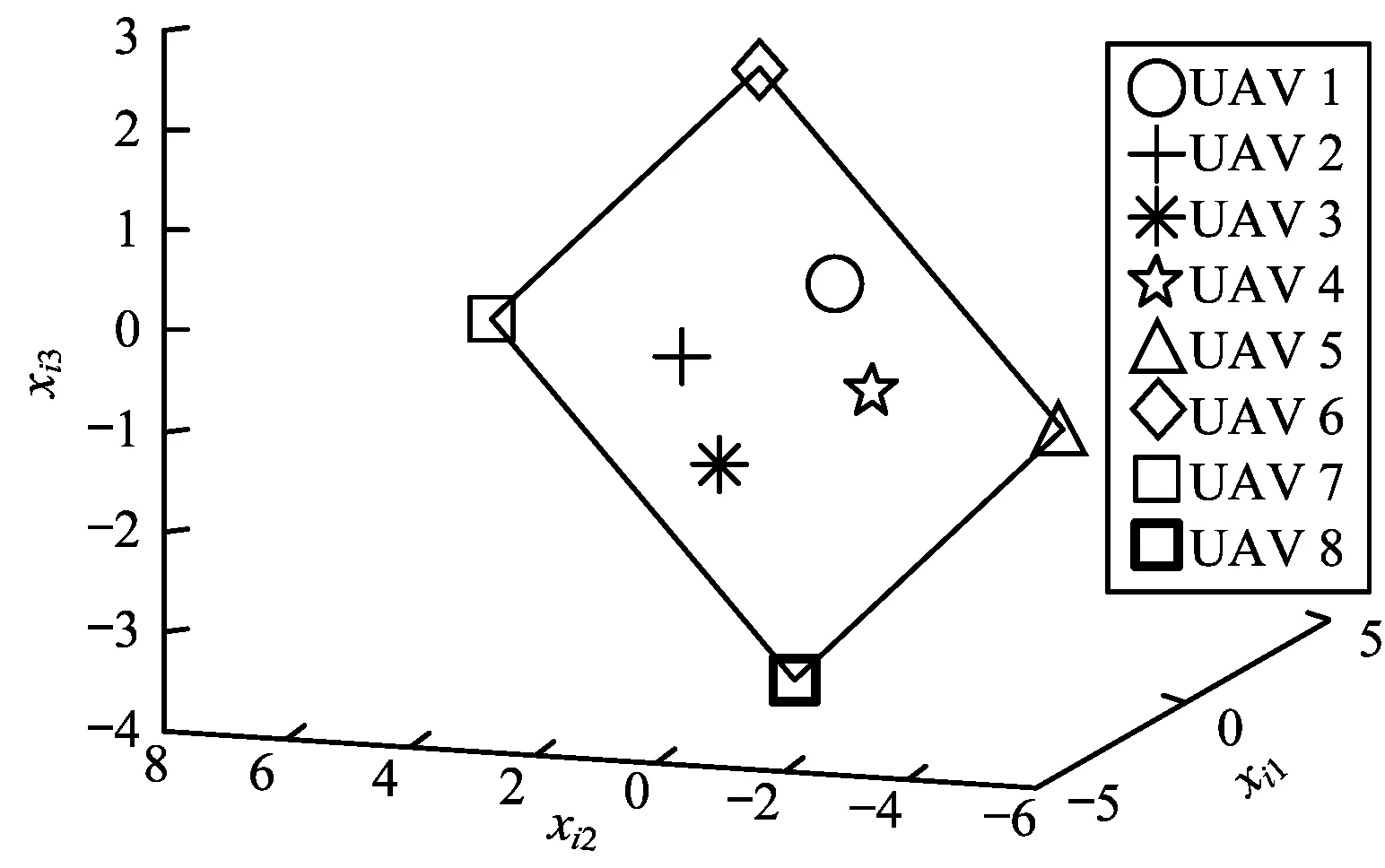
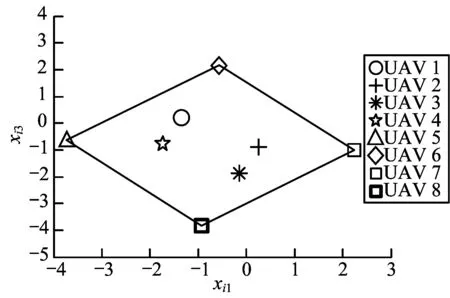
根据无人机要完成任务的不同,将式(2)中的无人机分为领导者和跟随者。假设式(2)中包含M(M 从L的结构可知,L3是有向图GE对应的Laplacian矩阵。为了使领导者形成期望时变编队,关于领导者之间的通信拓扑图,本文进行如下假设: 假设2GE有一条有向生成树。 在假设2成立的前提下,类比于引理2有如下引理成立: 引理4对于引理3中定义的矩阵EM,存在一个对称正定矩阵Q和一个正数α,使得[18]: (EM)TQ+QEM>αQ (3) 其中,0<α<2×min{Re(λ(EM))}。 假设3对于跟随者,至少有一个领导者有一条路径可到达。 在假设3成立的前提下,有如下引理成立: 领导者的期望编队队形描述为: (4) 其中,hi(t)=[hiz(t),hiv(t)]连续可微。 (5) 其中,r(t)称为编队中心轨迹。 (6) 本文基于一致性算法设计如下控制器: (xi(t)-xj(t)),i∈F (7) ui(t)=K1(xi(t)-hi(t))+ (xj(t)-hj(t)))+wi(t),i∈E (8) 其中,K1、K2和K3为待求的反馈矩阵,wi(t)为辅助控制函数。 将控制器式(7)和式(8)代入式(2)并整理,可得: (L1⊗BK2)xF(t)+(L2⊗BK2)xE(t) (L3⊗BK3)xE(t)-(L3⊗BK3)hE(t)- (IN-M⊗BK1)hE(t)+(IN-M⊗I)w(t) (9) 令ηi(t)=xi(t)-hi(t),i∈E,得: (L3⊗BK3)ηE(t)+(IN-M⊗A)hE(t)+ (10) 因此,领导者的编队形成问题转化为系统式(10)的一致性问题。 令ξi(t)=ηi(t)-ηi+1(t),得: (EM⊗BK3)ξE(t)+(E⊗A)hE(t)+ (11) 因此: ηM+1(t)=ηM+2(t)=…=ηN(t) (12) (13) (EM⊗BK3)ξE(t) (14) 式(13)、式(14)是渐进稳定的。 φF(t)=(L2⊗I)xE(t)+(L1⊗I)xF(t) (15) (16) 进而由引理5可得引理6成立。 引理6多无人机系统式(2)在控制器式(7)和式(8)的作用下,对于任意的有界初始状态,能够实现编队包含控制。 (17) 当式(17)成立时,具有多个领导者的多无人机系统实现时变编队包含控制问题,简化为式(17)中的两个系统的渐进稳定性问题。为实现式(17)的渐进稳定性问题,控制器设计步骤如下: 1)选取矩阵K1,使得: (18) 2)根据第1)步中求得的K1,选定标量参数α,求线性矩阵不等式(19),得到可行解P1: (19) 其中,0<α<2×min{Re(λ(EM))},S1=A+BK1。 3)根据第1)步中求得的K1,求解线性矩阵不等式(20),得到可行解P2: (20) 其中,λ=min(λ(L1))。 4)设计反馈矩阵K2=-BTP2,K3=-BTP1。 证明对式(15)求导可得: (L2L3⊗BK3)xE(t)-(L2L3⊗BK3)hE(t)- (L2⊗BK1)hE(t)+(L2⊗I)w(t)+ (L1⊗(A+BK1))xF(t)+ (21) 当系统式(12)中的领导者形成期望编队时: (22) 根据引理1可知:L3L1=0。 因此: (23) 又因为式(18)成立,所以系统式(21)是渐进稳定的,等价于系统式(24)是渐进稳定的。 (24) 选取Lyapunov函数为: (25) 令K3=-BTP1,对式(25)沿着系统式(11)求导可得: (26) 其中,S2=(EM)TQ+QEM。 根据引理4可得: (27) 选取Lyapunov函数为: (28) 令K2=-BTP2,对式(28)沿着系统式(24)求导可得: (29) 本文考虑由8架无人机构成的多无人机系统,其中,跟随者的标号集合为F={1,2,3,4},领导者的标号集合为E={5,6,7,8},在假设1成立的前提下,每架无人机在一维空间动力学系统模型由式(2)描述。无人机在三维空间运动,其初始状态为: x1=[1 -1 2 1 3 -4]T x2=[2 -1 -2 1 3 2]T x3=[1 -1 2 1 3 -4]T x4=[2 -1 -2 1 3 2]T x5=[0 1 -1 2 -3 4]T x6=[1 1 3 -1 2 0]T x7=[-1 3 1 -1 2 4]T x8=[0 1 -3 -1 2 -1]T 领导者的期望编队队形为: hix(t)=[hi1xhi2xhi3x]T,i∈E 其中,hi1x=[hi.zhi1v]T,hi2x=[hi2zhi2v]T,hi3x=[hi1z3hi3v]T分别表示在三维空间中的期望编队,本文令: 8架无人机系统内部通信拓扑结构如图1所示。 图1 多无人机系统拓扑结构Fig.1 Topology of multi-UAV system 从图1中可得到相应的Laplacian矩阵为: 按照控制器设计步骤设计控制器,通过步骤1)求得: K1=[-4 0] 选取a=0.9,求解步骤2)中的线性矩阵不等式,可得: 解步骤3)中的线性矩阵不等式,可得: 通过步骤4),可得: K2=[-0.261 1 -0.752 0] K3=[-0.090 2 -0.882 5] 多无人机系统在控制器式(7)和式(8)的作用下,领导者将形成时变编队,跟随者将在由领导者构成的凸包内移动。假设无人机在三维空间运动相互解耦,那么领导者在三维空间的运动状态相似,其中一维空间作为领导者的无人机实际位置与期望编队位置误差状态,实际速度与期望编队速度误差状态趋向于一致的过程如图2和图3所示。由定义1可知,当领导者位置误差与速度误差都达成一致时,领导者形成了期望的时变编队。 图2 领导者与期望编队位置误差Fig.2 Position error of leader and expected formation 图3 领导者与期望编队速度误差Fig.3 Speed error of leader and expected formation 从图2和图3可以看出,领导者的位置与期望位置误差以及速度与期望速度误差均在7 s时趋于保持一致,意味着领导者已经形成了期望的时变编队队形。 将8架无人机的位置在三维空间坐标中表示,其中,图4为t=1 s时的无人机空间位置,图5为t=10 s时的无人机空间位置,图6为t=15 s时的无人机空间位置。 图4 1 s时无人机空间位置Fig.4 UAV space position at 1 s 图5 10 s时无人机空间位置Fig.5 UAV space position at 10 s 图6 15 s时无人机空间位置Fig.6 UAV space position at 15 s 从图4可以看出,当t=1 s时,领导者仍未形成期望的编队队形,跟随者也未在领导者构成的凸包内运动,与图2和图3中显示的在t=1 s时,领导者位置误差与速度误差均未达成一致相呼应。从图5和图6可以看出,多无人机实现了时变编队包含控制,其中领导者在外围形成了一个时变的平行四边形编队,随着时间变化,领导者构成一个平行四边形,但随着时间变化,平行四边形也发生变化,这与图2和图3显示领导者的位置误差与速度误差均已经达成一致。与此同时,跟随者则在作为领导者的4架无人机构成的平行四边形内运动。 为更清晰地验证多无人机系统在控制器作用下形成的时变编队包含控制,将t=15 s时无人机在三维空间中的位置的不同视图在图7~图9中展示。其中,从图7~图9可以看出,领导者构成了平行四边形,而跟随者的运动也未超出领导者构成的凸包。 图7 15 s时无人机空间位置视图1Fig.7 UAV space position view1 at 15 s 图8 15 s时无人机空间位置视图2Fig.8 UAV space position view2 at 15 s 图9 15 s时无人机空间位置视图3Fig.9 UAV space position view3 at 15 s 本文通过对具有多个领导者的多无人机系统时变编队包含控制问题进行研究,设计一致性分布式控制器。在控制器作用下,无人机系统能够形成期望的编队包含控制,通过变量代换和矩阵特殊分解,将编队包含控制问题简化为低阶系统的渐进稳定性问题,使得各状态量更具有实际物理意义。但本文研究仍存在一些不足,当拓扑结构发生变化时,按照本文设计的控制器无法实现编队包含控制,下一步将对该问题进行研究。

3 问题分析和控制器设计






4 仿真结果与分析




5 结束语
猜你喜欢
自动化学报(2019年12期)2020-01-19
北京航空航天大学学报(2017年3期)2017-11-23
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
诗潮(2017年5期)2017-06-01
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
北京航空航天大学学报(2017年10期)2017-04-20
中国铁道科学(2015年4期)2015-06-21
中南财经政法大学学报(2015年5期)2015-04-07