基于PWM和自适应算法的超声波电机控制研究
2020-08-26 05:06范国鹏樊世鑫
安徽理工大学学报(自然科学版) 2020年3期
周 莉,刘 东,范国鹏,樊世鑫
(1.安徽理工大学电气与信息工程学院,安徽 淮南 232001;2上海大学通信与信息工程学院,上海 200444)
超声波电机的结构及其运行原理和传统的电磁电机都有很大的不同,它是通过压电材料的逆压电效应产生超声波振动,进而将电能转换为弹性体的超声波振动,并通过摩擦传动的方式转换成运动体的直线或者旋转运动[1]。超声波电机相对于传统的电磁电机,具有结构紧凑、低速大扭矩、高保持力矩、转子惯性小、响应速度快、断电自锁、不会受到电磁场干扰、运行噪音小、耐低温等优点[2-3]。由于超声波电机在运转时包含压电能量转换、摩擦传递能量的过程,导致其非线性及内部多变量耦合问题比较严重。为了解决这一问题,目前PID控制、自适应、滑模变结构、神经网络、模型参考、逆模型、H等方法,都已用于超声波电机的转速控制之中,提高了电机转速的稳定性,但是控制效果仍有较大的改进余地,所以,研究合适的电机驱动电路及适当的控制方法,用来提高电机运行控制系统的精度、效率及可靠性仍然是今后研究的重点[6]。
1 超声波电机的总体设计
超声波电机控制系统包括单神经元自适应算法的实现以及低频PWM的产生[7],硬件部分包括系统电源、超声波电机、LCD液晶屏、开关电源电路、隔离驱动电路、隔离放大电路、双推挽逆变电路、整流电路、光电编码单元、与运算电路、串口驱动电路、系统信息接口以及高速微处理器DSP和CPLD,超声波电机的控制系统总体设计[8-9]如图1所示。

图1 超声波电机控制系统结构图
采用系统信息接口将电机的转向、转速及转角信息经串口驱动电路送入高速微处理器DSP的串行通讯SCI接口,DSP根据输入的指令和来自电机运行时的反馈信息,计算出闭环控制所需的低频PWM信号,并通过SPI通讯,向高速微处理器CPLD输入DDS信号发生器的频率、相位、幅值控制字[10-11]。DSP输出的低频PWM波与CPLD的输出信号通过基于DDS的对称PWM信号发生单元处理后送至超声波电机的驱动单元,将四路对称PWM信号放大后作用于两相推挽式逆变电路,输出具有一定幅值、频率和相位的两相正弦电,驱动超声波电机[12-13]。
高速微处理器DSP包括具有A/D转换功能的模数转换器以及通用输入/输出口(GPIO)、定时器、看门狗、正交解码单元、PWM发生模块、电可擦除存储器、通信用的CAN总线、异步串行总线SCI及同步串行总线SPI等,处理器运行频率为150MHz,可以高速运算以及精确处理外来信息,为系统快速可靠运行提供了必要保证,其中内置正交解码单元配合光电编码单元,实现了对电机运行速度的获取[14]。另外,12位精度的模数转换器为系统获取超声波电机的弧极反馈电压提供了保证,DSP的串行通讯SCI接口经串口驱动电路与系统信息接口连接,实现系统运行指令的输入和运行状态的输出,高速微处理器可以通过串行通讯SCI接口把电机的运行转向、转速、转角、弧极反馈电压向外传输[15]。同样也可以通过系统信息接口、串行通讯SCI接口向高速微处理器输入电机运行指令控制电机的各种运行状态。
2 低频PWM控制方法
传统的电磁电机在转速控制时,可以直接调节驱动电压的频率、幅值、相位,但是由于超声波电机本身的非线性且多变量耦合较为严重,所以不能直接对电压的这三个要素进行控制,而是利用低频PWM信号控制电机驱动电压,使其处于断续状态,控制系统首先需要产生四路高频PWM信号作用于逆变电路,通过逆变电路输出两相高频电压信号,驱动超声波电机的运行,同时还要产生一路低频PWM信号,通过改变占空比来控制驱动电压的通断,所谓低频就是PWM频率相对于超声波电机的驱动电压频率要小的多,只有其10%左右。频率、幅值和相位是控制电机驱动电压的重要因素,主要采用以下三种低频PWM控制方法:通断PWM控制、正反转PWM控制、正反转停PWM控制方法[16],在没有平滑启动的严格要求下,通断PWM的方式下的有效功率占比最高,所以采用通断方式对PWM占空比进行控制[17],从而达到对转速的调节,提高了电源利用率。所以,采用什么控制方式控制低频通断PWM信号占空比将是解决问题的关键。
3 单神经元自适应PID控制策略
低频PWM的占空比由单神经元自适应PID算法进行控制,为了解决传统PID控制鲁棒性不足的问题,本文使用PID控制与神经网络控制结合起来,采用神经网络对PID参数进行实时调控[18],使系统具有自适应性。单神经元自适应PID控制系统结构如图2所示。
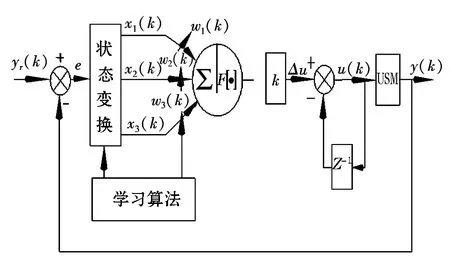
图2 单神经元自适应PID控制系统结构图
图2中,u(k)是控制量,K是控制参数增益,控制过程如下,光电传感器对电机运行状态进行检测,将弧极电压作为反馈信号,系统根据反馈信号对加权系数进行调整,最终达到实时调控kp、ki、kd,从而系统具备了自学习自适应能力,系统的鲁棒性得到增强,控制电机按照预设的转速运行,控制器的参数kp、ki、kd的求解方法如下[19],增量式PID的离散表达式为
Δuk=kp[e(k)-e(k-1)]+kIe(k)+
kD[e(k)-2e(k-1)]+e(k-2)
(1)
由(1)可记
所以
(2)
K:比率系数;wi(k)∶xi(k)的对应权值;
由上式推导出
所以,必须要求出加权系数,才可以确定参数值。在对输出误差的控制上面可以使用最优控制中二次型性能指标的思路,假定目标函数为
(3)
yr(k):设定值;y(k):反馈信号值
为了使Jk向wi(k)的负梯度方向靠近,还需要满足
wi(k+1)=wi(k)+Δwi(k)=wi(k)+
(4)
ηi: 学习效率
由于
(5)
且
将(5)式差分近似化后可得
(6)
所以,得出权值计算方法如下
η1:积分学习速率;
η2:积分学习速率;
η3:微分学习速率。
经过多次试验得到他们的值分别是:
即可确定权值,进而求得kP,kI,kD,使PID控制的参数得到了实时的调整,控制系统结构如图3所示。

图3 控制系统结构
4 系统仿真测试
以TRUM-60作为研究对象,系统的仿真测试在TRUM性能仿真及优化设计软件下进行,当以超声波电机的弧级反馈电压作为反馈信号时,可以实现对电机的转速控制。转速特性曲线是由仿真软件所得的数据在MATLAB中拟合所得,设定电机的转速为60rad/min。首先讨论空载时电机的启动。
空载时电机启动阶段的固定PID参数控制与单神经元自适应PID控制的转速特性曲线如图4所示。

图4 空载启动时的电机转速特性曲线
对比图4中两条曲线可知,固定PID参数控制使得启动曲线超调量大,并且响应速度慢;单神经元自适应PID控制策略不仅响应速度快,而且超调量小,在启动过程中的震荡频率和幅值也比固定PID参数控制的小。下面讨论空载时稳态特性曲线。

图5 电机在固定PID参数控制下的特性曲线

图6 电机在单神经元自适应PID控制系统下的特性曲线
对比空载时两种控制方法的转速特性曲线,可以看出,固定PID参数控制方式下的曲线波动比较大,由于超声波电机依靠摩擦驱动,必然会导致温度上升,随着时间的累计,固定参数不能有效调控转速,非线性的温升导致其波动幅度逐渐变大。单神经元自适应PID控制实时调控参数,具有很强的自适应能力,所以其波动曲线在可控范围之内。下面讨论负载时的情况。

图7 电机在固定PID参数控制系统下的特性曲线

图8 电机在单神经元自适应PID控制系统下的特性曲线
从上图7、图8对比可知,负载状态下,固定增益PID控制系统下的电机的震荡频率高,并且震荡幅度大,系统的波动大,随着时间的累积,温度的上升使谐振频率点发生漂移,导致电机的波动会越来越大,所以系统不能有效的控制电机的转速,而单神经元自适应PID控制实时调节参数,可以有效控制电机的运转。
5 结论
本文介绍了基于低频PWM和单神经元自适应PID控制的超声波电机控制策略,通过与固定参数PID控制的对比可知,系统具有电源利用率高、调速范围宽、电机运行状态稳定、系统具有自适应能力、便于数字化方案实现等优点,对超声波电机的研究具有重要意义。
猜你喜欢
英语文摘(2022年4期)2022-06-05
中国典型病例大全(2022年7期)2022-04-22
汽车实用技术(2022年7期)2022-04-20
电子产品世界(2021年8期)2021-01-16
房地产导刊(2020年11期)2020-12-28
当代陕西(2019年8期)2019-05-09
中国计算机报(2019年49期)2019-02-07
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
中国新闻周刊(2017年36期)2017-10-21