基于Arduino单片机的智能快递小车设计
2020-09-10 21:23付琳
内燃机与配件 2020年17期
付琳
摘要:本文介绍了一种基于Arduino单片机的智能快递小车的设计方案。这种小车具有自动循迹、自主避障且制作成本低廉的特点,可实现快递的智能运输和投取。小车采用了超声波传感器与红外线传感器相结合实现避障功能,借助黑标传感器来进行路面循迹,将机械臂与颜色传感器相结合,实现对快递的智能识别及收取。经过多次路面模拟实验,证明了该设计方案在智能投取、运输快递上具有非常出色的效果。
关键词:避障;循迹;机械臂;智能快递投取
0 引言
随着信息技术等一批战略性新兴产业的兴起,智能小车已成为智能信息领域的热门研究对象。智能小车集道路感知、规划以及行为控制和执行等多个功能于一体,可实现机械结构的自我引导移动,是一种综合智能系统[1]。智能小车由于其成本低廉及实用性高的特点,是现代运输问题、科学探测的极佳解决方案。国内许多学者也对智能小车进行了相关研究,如陈杰等人的多样信息采集智能小车的设计[2];周磊磊等人的基于STM32的模拟工业自动化智能搬运小车设计[3];白欢等人的智能小车无线控制系统的设计与优化[4],都对智能小车的发展提供了宝贵的经验。
智能小车包括传感器、控制器、执行器三个部分。传感器部分用于接收外界信息,例如路障、光线等,可以看作我们的眼睛、耳朵、皮肤等感知器官;控制器部分用于接收传感器传递的信号并根据事先规定好的工作方式(编写好的程序)进行决策且继续传递给执行器;执行器顾名思义就是最终的执行者,其作用就是执行控制器传递的指令,例如轮胎、机械臂都是属于执行器[5]。本文介绍了一种智能投取快递小车的设计,采用Arduino單片机作为主控单元,包括循迹模块、避障模块、抓取模块、返航模块,下文将分模块介绍智能快递小车的设计实现。
1 系统模块的设计
智能投取快递小车采用直流电机作为执行元件,小车的Arduino主控单元发出PWM调制信号,分别控制车载直流电机的转速以实现小车的转向。以前驱小车为例,电机A控制左前轮,连接的是Arduino主控单元的IN1、IN2端口;电机B控制右前轮,连接的是Arduino主控单元的IN3、IN4端口。要实现小车右转只需要将右前轮前向驱动而左前轮不动或者左前轮后向驱动而右前轮前向驱动,即给IN1、IN2、IN4端口输入0、IN3输入1或者给IN1、IN4输入0、IN2、IN3输入1。上述两种方式都能实现小车右转,区别在于前者转速比较慢,后者反应比较快。
1.1 循迹模块设计
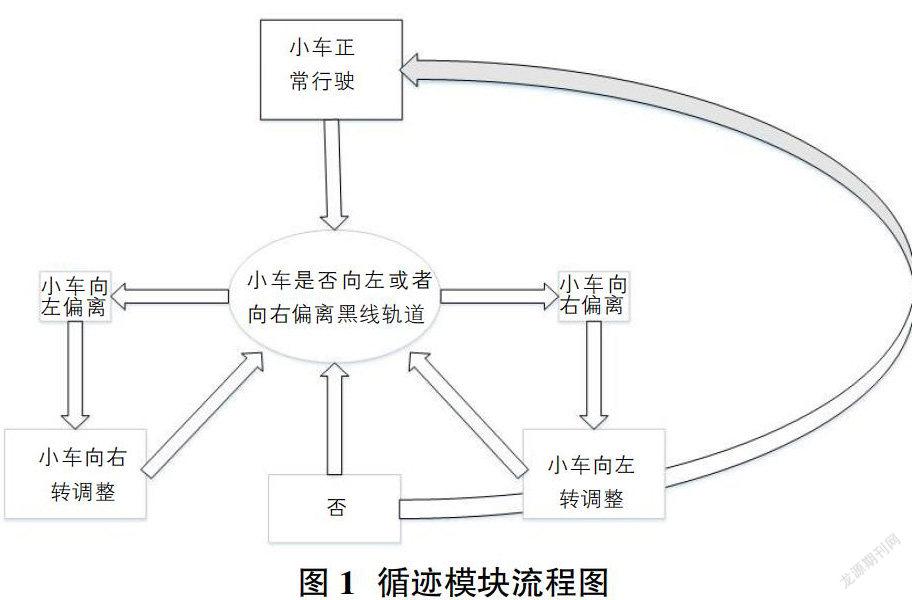
由于黑线和白色地板对光反射系数的不同,采用黑标传感器来识别白色地板上的黑线,Arduino主控单元根据黑标传感器接收的数据判断黑线的位置,实现小车路线的动态规划,从而实现智能循迹。小车根据多个黑标传感器的数据接收判断左右走向,无论是S型弯道亦或者是直角弯道,小车都成功穿过,成功完成循迹行驶。循迹模块流程图由图1所示。
1.2 避障模块设计
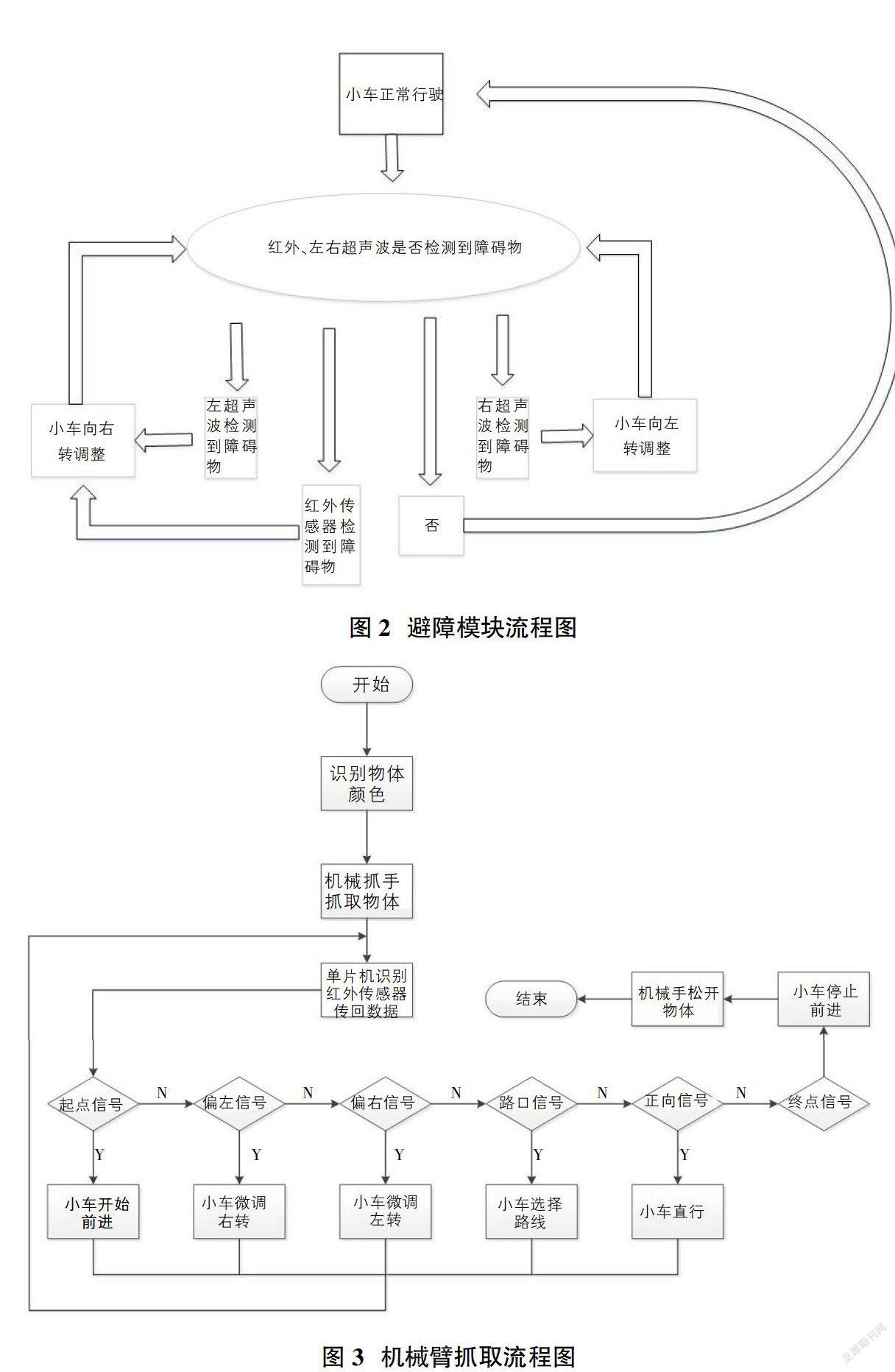
智能投取快递小车的避障模块硬件由左右超声波传感器和红外传感器构成,实现小车对障碍物的全方位有效避障[6]。具体避障流程图如图2所示。
避障系统采用红外、超声波结合的模式,小车车头中央集成一个红外避障传感器,用于探测道路前方障碍物,小车两侧集成左右两个超声波传感器,用于分别探测小车左右两侧的障碍物,实现了小车行进过程中的全方位避障。Arduino主控单元通过超声波或者红外避障传感器反馈的信号判断障碍物是否存在及大概位置,控制直流电机做出避障应答,从而实现安全行驶。
1.3 机械臂模块设计
机械臂是实现抓取功能的核心。智能投取快递小车采用五自由度的机械臂来实现不同情况下的快递抓取,根据路况、物料大小、物料的不同位置进行自主抓取和搬运物件。机械臂硬件结构由五个舵机组成,可实现纵轴和横轴两相互垂直方向的直线运动和一个同平面内的摆动运动,机械臂的底部舵机、中间舵机和机械爪舵机分别连接到开发板的舵机口[7]。
机械臂舵机与小车的控制板直接相连,以实现Arduino主控单元对机械臂的实时控制。机械臂采用程序化自主控制,为灵活应用的智能搬运需求,也可在蓝牙和无线WI-FI的辅助控制下通过手机APP人工控制实现机械臂的精确抓取工作。当智能小车到达预定位置时,主控单元通过调节舵机角度来控制机械臂的旋转和手爪的开合,根据传感器的反馈进行调整,实现投取快递小车对快递物品的精准抓取[8]。
智能小车采用颜色传感器对快递进行抓取分类。到达指定位置后,颜色传感器采集物料颜色特征并传输给Arduino主控单元,Arduino主控单元驱动舵机使机械臂做出抓取动作,超声波传感器监测小车前方障碍物距离,Arduino主控单元对反馈数据做出判断,决定是否启动防撞方案,在确认安全后,Arduino主控单元持续识别红外传感器的反馈信号,根据反馈信号数据的不同组合,判断小车当前位置状态以及待执行的任务,对直流电机输出相应的指令信号,及时调整小车下一步的运动状态;若Arduino主控单元接收到终点信号,则控制小车停止,驱动机械臂松开快递,进行下一次搬运,机械臂抓取流程如图3所示。
1.4 返航模块设计
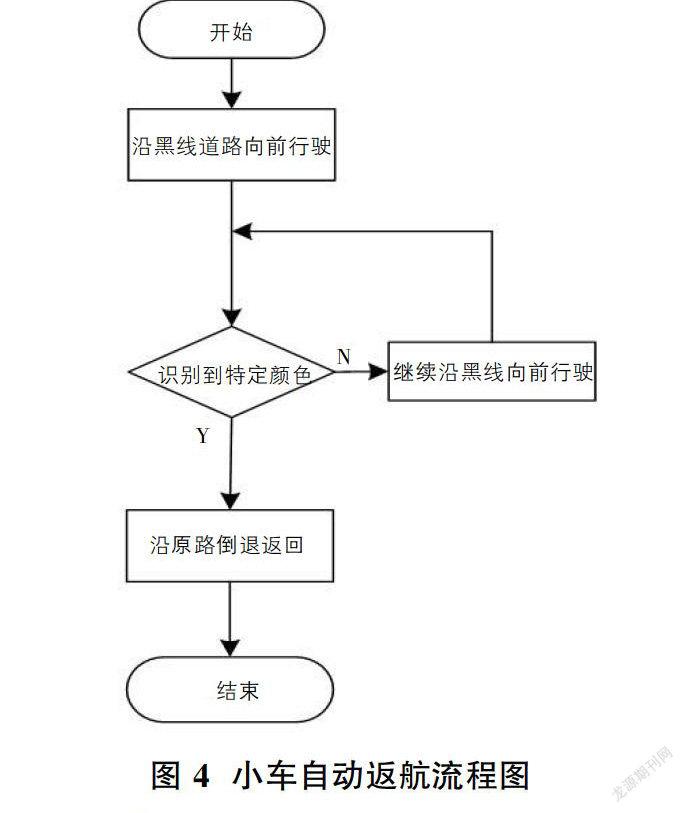
智能小车在完成快递包裹运输后,要实现小车能够实现自动返回初始点,通过在终点路面铺设特定颜色,使小车的颜色传感器采集到指定颜色传回给系统,系统做出相应的指令,使小车能够有效准确地返回初始点。小车自动返回流程如图4所示。
2 结论
本文提出了一种集避障、循迹于一体的智能快递运输、投取小车的设计,对各个模块功能的原理及制作过程进行了详细的阐述。该智能快递投取小车遵循模块化的软硬件设计原则。小车可根据环境障碍、光线角度的类型不同调整运行路线,实现智能避障、循迹行驶,将多类传感器相结合实现快递的无人化投取操作。通过自主设计的手机APP调节驱动电机的速度和舵机的转向角度,调节快捷精确。该设计系统具有成本低廉,搬运效率高的特点,适用于现代运输以及科学探测等领域,具有较强的经济效益。今后智能快递小车还将从全地形适应的角度进行进一步研究。
参考文献:
[1]程立英,李鹏飞,白雪.基于Arduino单片机控制的避障小车的设计方案[C].中国:计算机产品与流通,2018-12.
[2]陈杰,宋恒宇,杨天祥.多样信息采集智能小车的设计[J].科技视界,2020-4-15.
[3]周磊磊,余家天一,郭虓赫,周丽蓉,谢光前.基于STM32的模拟工业自动化智能搬运小车设计[J].电脑知识与技术,2020-3-25.
[4]白欢,白一博,巩银兵,车志忠.智能小车无线控制系统的设计与优化[J].南方农机,2020-1-15.
[5]郭子健.基于单片机的无线遥控智能小车的设计与制作[J].科技风,2014(13):68.
[6]单希明,刘蓟南,张千宇.基于单片机的红外避障与循迹智能小车[J].湖北农机化,2019(09):76.
[7]马炳周.智能避障物料小车的设计及应用[J].科技风,2019(25):11.
[8]赵晋,郭焕萍,刘堃.基于Arduino小车的机械臂智能搬运研究[J].电子世界,2019(04):53-54.
猜你喜欢
电脑知识与技术(2022年9期)2022-05-10
中国新技术新产品(2017年2期)2017-01-20
农机使用与维修(2016年12期)2017-01-17
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
电脑知识与技术(2016年17期)2016-07-23
无线互联科技(2015年6期)2016-03-05
电子世界(2004年6期)2004-07-27