
穿戴式颈部动作检测系统的设计
2020-09-14 06:04盛希宁
林业机械与木工设备 2020年9期
盛希宁
(江苏联合职业技术学院常州刘国钧分院,江苏 常州 213000)
随着体感应用与穿戴式装置的不断发展,目前市面上已出现将惯性传感器穿戴于后颈部来达到颈部姿势提醒及颈部体感互动功能的颈部穿戴式产品[1-4],但其关键技术颈部动作惯性感测信号识别的相关研究至今仍较为缺乏。针对以上问题,提出一种利用惯性传感器六轴检测信号进行处理的即时颈部动作识别方法。
1 系统硬件架构设计
系统硬件架构如图1所示。首先,使用微控制器读取惯性传感器即三轴加速度传感器及三轴陀螺仪传感器所监测到的颈部动作信号并进行预处理。通过蓝牙模块,此信号无线传输至手机端的Android应用程序,进行颈部动作信号的采集、识别和运算。识别运算部分主要是使用动态时间校正算法来计算出颈部动作信号与建立的颈部动作信号模型之间的差距,用以度量二者之间的信号相似性,最后再通过最近邻分类法产生最终的识别结果。颈部动作信号模型是由使用者在系统初始化阶段将本研究所定义的18个颈部动作帧均进行一次建立的。
设计的穿戴式装置系统硬件测试实物如图2所示。GY-80模块中的三轴加速度传感器ADXL345和三轴陀螺仪传感器L3G4200D用于惯性信号检测,通过杜邦线将嵌入式开发板DFRduino Fio与六轴惯性传感器模块GY-80连接,二者间共有VCC、GND、SCL、SDA四条线,接线如图3所示。微控制器DFRduino Fio使用轮询的方式读取来自传感器模块GY-80的六轴(三轴加速度和三轴陀螺仪)信号后先进行信号的前处理,再通过UART串口将已处理的信号发送,传输速率设定为57 600 bps。由于GY-80传感器模块检测的是三轴加速度信号和三轴陀螺仪角速度信号,因此各个轴的检测值均有正、负方向性。
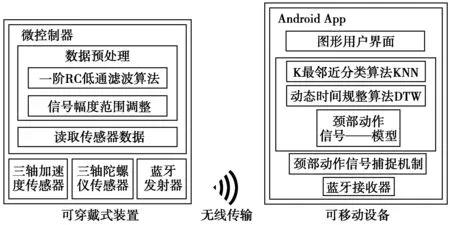
图1 系统硬件架构

图2 系统硬件测试实物

图3 DFRduino Fio与GY-80模块引脚接线
2 系统软件设计
本研究提出的系统软件设计流程如图4所示。在系统初始化阶段,使用者需要创建本文所定义的各种颈部动作作为系统的初始化输入,以建立颈部动作信号模型,随后进入即时颈部动作识别阶段。无论是系统初始化阶段还是即时识别阶段,系统均会对传感器的输出信号进行预处理,完成采集颈部动作信号的各个步骤。
本文将较为常见的18种颈部动作进行了基本定义,以中间位置姿态作为各种颈部动作进行前进或后行的初始状态,各种动作种类定义名称和说明见表1。其中,1~6号动作属于连续的来回动作,而7~18号动作属于单独的来回动作。本文中,颈部动作完成之后若进入静止状态,则被视为一个完整的颈部动作。本文对静止状态的定义为:颈部维持不动的时间大于或等于自颈部动作结束直至得出识别结果的这一段时间,该段时间主要包含了信号采集机制中的停止采集侦测时间以及颈部动作信号识别运算所消耗的时间。

图4 系统软件设计流程
本文定义的连续动作信号是指颈部动作所对应传感器输出的信号波形。其中,AX、AY、AZ方向上为三轴加速度信号,GX、GY、GZ方向上为三轴陀螺仪信号。穿戴式装置置于人体颈部的六轴感应方向标示如图5所示。
若颈部动作信号波形的杂波过多,则会导致后续难以进行颈部动作信号的捕捉机制设计,并且可能影响各种颈部动作信号的波形特征,进而导致颈部动作识别运算的准确度下降[5-8]。因此,本文选用离散型一阶RC低通滤波器算法来进行杂波的滤除。

表1 动作种类定义名称及说明

图5 六轴感应方向标示
3 系统传感器模拟测试
六种连续去回动作加速度传感器输出信号如图6所示。图6中的横轴代表来自DFRduino Fio开发板的微控制器内部UART接口输出的每个传感器信号的序号,纵轴代表加速度传感器的输出值。
六种连续去回动作陀螺仪传感器输出信号如图7所示。由图7可观察到文中定义的六种连续去回颈部动作所对应的三轴陀螺仪传感器输出信号GX、GY、GZ波形。由于其测量的物理量为角速度,故可看出GX、GY、GZ 信号在未有动作发生时皆相当接近0,信号仅在有动作时才会产生变化。本文对 L3G4200D三轴陀螺仪传感器模块的测量范围设定为±250 dps,由测量数据可知 L3G4200D模块在此情况下的每单位输出值代表8.75 mdps的角速度物理量,故其测量信号较大时,其输出值的范围将达到上万。

图6 六种连续去回动作加速度传感器输出信号
在系统进行实测时,通过计算使用者在即时识别阶段所进行的颈部动作信号以及在系统初始化阶段所建立颈部动作信号模型之间的相似性来进行颈部动作种类的识别。在信号相似性算法部分,较简单的方式为直接按照两个信号顺序进行信号点对点的欧基里德距离计算。所有信号点与点之间的欧基里德距离的总和距离值越小,则代表两信号的差异越小,而相似性越高,故可将该距离作为信号相似性的度量值。

图7 六种连续去回动作陀螺仪传感器输出信号
4 结束语
本文信号前处理杂波滤波机制主要是通过目测观察颈部动作信号波形的平滑程度来选择滤波参数,未来可针对参数值对颈部动作正确辨识率的影响进行研究,以找出更佳的参数值。由于加速度传感器与陀螺仪传感器所感应的物理量不同,本文仅将此两种传感器的输出信号调整至相近的基本位准与振幅范围,未来可进一步研究如何才能更有效地融合不同种类的传感器信号,以提升系统的运算效能及正确辨识率。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
中老年保健(2022年5期)2022-08-24
中老年保健(2022年6期)2022-08-19
安徽医学(2022年5期)2022-05-21
北京航空航天大学学报(2021年9期)2021-11-02
河北画报(2020年8期)2020-10-27
百科探秘·航空航天(2017年9期)2017-12-31
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
浙江大学学报(工学版)(2016年2期)2016-06-05
