基于节能理念的电动汽车节能控制器探究
2020-09-20 11:45喻博轩
科技与创新 2020年18期
喻博轩
基于节能理念的电动汽车节能控制器探究
喻博轩
(武汉理工大学,湖北 武汉 430070)
随着传统汽车的能源和环境问题日益突出,电动汽车凭借其清洁和使用可再生能源的优势被逐渐研究与广泛使用,逐渐取代传统汽车。动力驱动系统作为电动汽车的重要系统,它的传动效率在电动汽车的能耗方面起着重要影响。提供了一种电动汽车电机的节能控制器,采用单片机作为控制系统,在保证电动汽车续航里程的同时,实现对电动汽车的节能控制。
电动汽车;动力驱动系统;节能控制器;单片机
近年来,随着中国社会经济飞速发展,人们生活水平不断提高,人们对于生活的质量要求也越来越高,从居家生活到出行方式都发生着潜移默化的改变。在出行方式的选择方面,汽车凭借其快速、方便等优势成为大部分家庭必不可少的交通工具,同时,汽车行业的发展也带来了资源短缺和环境污染等重要问题[1]。为了顺应社会发展,改善环境问题,新能源汽车逐渐取代传统的燃料汽车,成为汽车未来的发展方向。
随着国家大力支持电动汽车的发展,越来越多的企业开始由传统燃料汽车向新能源汽车转型[2]。随着新能源汽车的不断发展,纯电动汽车的续航里程也在迅速提高,甚至成为纯电动汽车占领市场的关键因素。目前市面上已经开始在售的纯电动汽车的续航里程已达到500 km,虽然纯电动汽车解决了燃料消耗问题,但耗电量并不少,因此长续航里程的纯电动汽车还是不能达到节能减排的效果。
1 电动汽车节能控制器的整体结构设计
由于动力驱动系统是电动汽车的核心,其传动效率直接影响电动汽车的能耗[3]。因此对动力驱动系统的设计与改进是实现电动汽车节能减排的重要因素。本文设计了一种电动汽车节能控制器,采用单片机作为控制系统,实现对电动汽车蓄电池放电的合理控制和电动机启动及调速的电流分配,在确保电动汽车具有长续航里程的同时实现节能控制。
电动汽车节能控制器主要由控制器、电动机和信号分析器组成,包括主控制芯片、电动机驱动模块、制动发电模块、数据采集模块、滤波计算模块、阻力度计算模块、坡度计算模块、CAN总线连接模块、和热量管理模块等。
1.1 主控制芯片的设计
电动汽车节能控制器的主控制芯片采用89C51单片机芯片,通过收发器对数据进行实时采集,并通过CAN总线将采集到的数据反馈给单片机,单片机的控制决策模块对车辆行驶过程中的功率进行计算,控制决策模块测量得到在空载、半载和满载状态下,控制车辆的扭矩输出的曲线,并根据当前的车辆控制预期速度,控制电动机的转速,从而使车辆以当前的速度区间内最节能的速度行驶。
1.2 节能控制器的各模块的功能
节能控制器各模块的功能如下。
1.2.1 数据采集模块
从CAN总线上采集实时信号,包括车速、转速、扭矩等动力信号。
1.2.2 滤波计算模块
滤波计算模块包括速度滤波器、加速度滤波器和扭矩滤波器,为阻力度计算模块提供精确性保证,滤除速度、加速度、扭矩信号内的高频噪声,提高数据的精确度。
1.2.3 阻力度计算模块
计算车辆当前所受阻力情况,决定开始节能控制或终止节能控制的关键模块。
1.2.4 坡度计算模块
控制器扩展电路模块,融合动力数据和传感器估算当前GPS对应坡度,并通过通信模块将数据传回中心,为节能应用提供基础数据。
1.2.5 IPD控制
使汽车电动机达到车速控制的要求,需要根据实际运行情况与控制预期的差别进行动态PID控制。
1.2.6 热量管理模块
根据所述温度信息调整电动机的功率和电动汽车冷却系统的功率,使所述大功率器件的温度维持在预设的温度区间内。
1.2.7 制动发电模块
当汽车制动时,使电动机以发电模式工作,将车辆的动能转换成电能。
1.2.8 电动机驱动模块
电动机驱动模块控制电动机的转速与转矩。
2 电动汽车节能控制器的实现
2.1 PID控制器的实现
PID控制器是将偏差的比例计算、积分计算和微分计算通过线性组合构成控制量,将被控对象进行控制。在整定PID控制器参数时,可以参照控制器的参数与系统动态性能和稳态性能之间的定性关系。为了减少需要整定的参数,先可以采用PI控制器。为了保证系统的安全,在调试开始时应设置比较保守的参数,比如比例系数不要太大,积分时间不要太小,以避免出现控制系统不稳定或者超调量过大的异常情况。给出一个阶跃给定信号,根据被控量的输出波形可以获得系统性能的信息,例如超调量和调节时间。应根据PID系数与系统性能的关系,反复调节PID的参数。如果阶跃响应的超调量太大,经过多次振荡才能稳定或者根本不稳定,应减少比例系数、增大积分时间。如果阶跃响应没有超调量,但是控制量上升过于缓慢,过度时间太长,应按相反的方向调整参数。如果消除误差的速度较慢,适当可以减少积分时间,增强积分作用。反复调节比例系数和积分时间,如果超调量仍然较大,可以加入微分控制,微分时间从0逐渐增大,反复调节控制器的比例、积分和微分部分的参数。PID控制系统原理如图1所示。
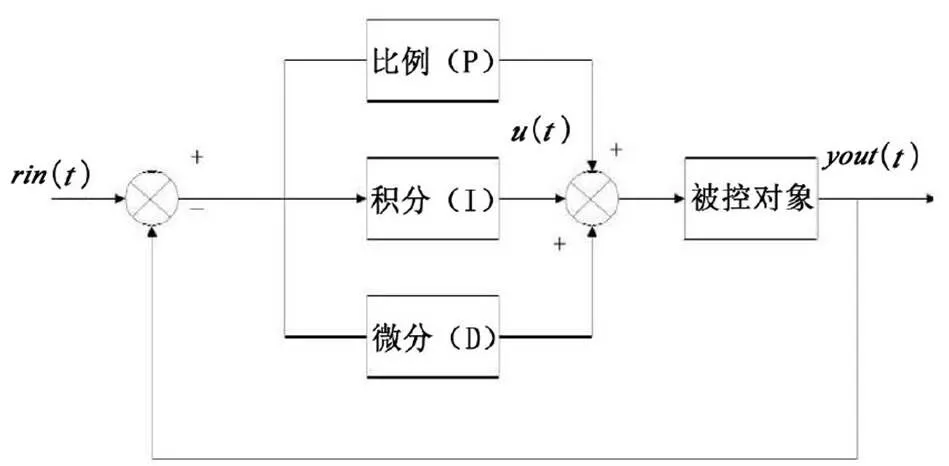
图1 PID控制系统原理图
2.2 信号分析器的实现
2.2.1 阻力度计算
阻力度计算用于决策何时开启节能控制,何时需要关闭节能控制。当汽车处于平稳行驶状态下时开启节能控制,汽车行驶状态稳定,因此可以尽量多地控制电池输出而不影响司机的操作。关闭节能控制的时机如下:上坡时,司机往往需要降挡并拉高转速度来保证车辆的上坡力矩,如果进行节能控制会导航车辆上坡无力甚至无法上坡;刹车时,此时需要由司机完全主导动力系统,不可进行额外干预否则会引起安全问题;怠速下坡时,此时额外控制反而省电。
2.2.2 滤波计算
在阻力度计算模块中,用到的速度、加速度、扭矩信号都需要进行滤波处理。因为汽车的输出轴上通常都有转速传感器,可以很容易地将其采集到的转速信号转化为汽车的车速,如果对车速信号直接差分,虽然可以得到汽车的加速度,但由于这样获得的加速度信号噪声很大,很难应用于汽车的控制系统。需要对车速信号进行滤波、差分、再滤波的处理获得良好实时性和精度的汽车纵向加速度。滤波算法模块需要借助数字信号处理算法,首先进行车辆信号功率谱估计,得到截止频率,并设计相应的滤波类型、滤波阶数。滤波器计算实质为一个长序列的浮点乘法求合运算,因此在产品设计选型时需要注意核心处理器的浮点运算能力。计算之后处理效果理想情况下应该为一光滑曲线。同理,还需要对扭矩等信号进行滤波处理,得到处理后的信号再送入阻力度计算模块中。
2.2.3 坡度计算
目前跟据汽车动力数据测量道路坡度的方法主要以车辆匀速行驶为主,计算等速行驶时功率:

式(1)中:e为总功率;f为滚动阻力消耗功率;w为风阻消耗功率;i为坡度阻力消耗功率。
从一个较短的时间窗来看,匀速行驶的汽车的滚动阻力、风阻、空调消耗功率近似恒定,而总功率消耗主要取决于道路坡度大小。在现实条件下,不可能一辆车始终保持匀速行驶。因此需要挖掘许多车辆的行驶数据,从每辆车经过一段路线的匀速片段中挖掘出整个线路的坡度变化曲线。再按照数据清洗、整体融合步骤挖掘出整个路段的坡度变化曲线。数据清洗后保留的数据是所有车辆近似匀速行驶的片段,这样做的目的是排除加速度对功率变化的影响,并且由于在匀速片段上车辆的速度质量不变,因此道路摩擦阻力消耗功率相等、风阻消耗功率近似相等,汽车功率变化主要受坡度因素影响。
3 电动汽车节能控制器的节能效果
扭矩输出曲线指某一汽车以某个负载、某个挡位、某个坡度行驶时,电动机需要输出的力矩曲线。挡位一定、电动机转速一定时,由于车速是车辆行驶中最主要的操作因素也是决定行驶时间的主要因素,而转速对应万有特性表中的油耗率参数,因此车速转速对应曲线对油耗和控制汽车工作状态十分重要。在确定汽车主减速比和传动比参数的情况下计算出关系曲线或者实际测量出关系曲线。根据所设定速度值,尽量在一个区间内将速度往最节能的方向调整,同时根据阻力度的变化,实时估算车辆的空满载状态,及时切换负载曲线,从而确定节能区间。
4 结语
此次研究基于节能理念设计了一种电动汽车节能控制器,采用89C51单片机芯片作为控制系统,对数据信号进行实时采集,并通过其控制决策模块,对采集的数据进行计算,保证车辆在空载、半载和满载状态下,控制车辆的扭矩、转速,使车辆以当前的速度区间内最节能的速度行驶,从而在降低电动汽车的功率下消耗。通过节能效果实验,表明本文设计的一种电动汽车电机的节能控制器能在保证电动汽车的续航里程的同时实现对电动汽车的节能控制。
[1]颜孝勇.纯电动汽车整车控制器开发及控制策略研究[J].汽车实用技术,2020(9):20-21.
[2]陆广华,田爱军,王德铭.混合动力汽车发动机节能控制器的设计与实现[J].现代电子技术,2017,40(6):84-87.
[3]詹慧贞,范珍珍.电动汽车节能控制器的设计研究[J].现代电子技术,2019,42(20):99-102.
U469.72
A
10.15913/j.cnki.kjycx.2020.18.018
2095-6835(2020)18-0050-02
〔编辑:严丽琴〕
猜你喜欢
农业工程学报(2022年10期)2022-08-22
大电机技术(2022年3期)2022-08-06
舰船电子工程(2022年6期)2022-08-02
汽车电器(2022年6期)2022-07-02
防爆电机(2022年3期)2022-06-17
考试与评价·高二版(2020年4期)2020-09-10
汽车与驾驶维修(维修版)(2020年4期)2020-07-06
福建基础教育研究(2020年3期)2020-05-28
计算机应用(2016年10期)2017-05-12
军事文摘·科学少年(2017年2期)2017-04-26