
基于ADAMS折叠式动臂工作装置动态特性仿真分析
2020-10-26 11:52李兆安
工程技术研究 2020年17期
李兆安
(遵义职业技术学院,贵州 遵义 563000)
折叠式动臂挖掘机工作装置采用新型的折叠式动臂结构,由后动臂、前动臂、斗杆和铲斗组合而成。将原先经典的整体式动臂拆分成由前动臂和后动臂两个结构件铰接而成的结构,前动臂由两个前动臂油缸进行调控,后动臂由后动臂油缸(调整油缸)进行调控。在以往的轮式折叠动臂液压挖掘机设计中,对折叠动臂工作装置的设计多采用静力学分析计算来确定工作装置的受力情况,依靠安全系数的选取来代替工作装置的动态载荷、冲击与振动分析。借鉴整体式动臂挖掘机的研究方法对轮式折叠动臂液压挖掘机的工作装置进行前动臂、后动臂、斗杆、铲斗四构件联动的方式来分析其运动特性,在理论建模和仿真分析上都较整体式动臂的三构件联动的分析更为复杂。对折叠式动臂工作装置进行简化处理后建模,再对其进行仿真分析,以期得到更加接近实际挖掘作业工况下的动态特性仿真。
1 折叠式动臂工作装置运动学模型
基于多体动力学建模方法—拉格朗日方程对折叠式动臂工作装置进行动力学建模,模型的建立基于上文得到的D-H变换矩阵。该模型有空间转换矩阵推导出,最终得到的是封闭式力矩函数表达式。以后动臂与机架的链接铰点建立系统基坐标系,考虑到折叠式动臂工作装置的结构特征,将前动臂和后动臂简化为一体,得出三个自由度的折叠式动臂工作装置动力学方程如下。
推导出折叠式动臂工作装置基于功能平衡的拉格朗日动力学方程一般形式如下:

式中:Dij为折叠式动臂工作装置各构件的等效转动惯量(i=j)或各构件间的耦合惯量(i≠j);Iai为传动装置的等效转动惯量;Gi为折叠式动臂工作装置各构件的重力项;Hijk为折叠式动臂工作装置各构件两两链接关节间的向心力或各构件对于系统的哥式力作用项;B()为折叠式动臂工作装置各关节摩擦力矩;Fload(Fi,Fn)为折叠式动臂工作装置的挖掘负载;n=3,是由折叠式动臂工作装置多体系统的自由度决定。
折叠式动臂工作装置的各构件的惯量和重力是其本身所固有的物理常量,也是影响多体系统各构件间传动稳定性和系统内部位置参数精度的决定性因素。而多体系统内各构件两两链接关节间的向心力或各构件对于系统的哥式力作用项是在多体系统进行高速运动时产生的,对方程的影响仅限于高速运动,且速度越大影响越大。工作装置的油缸等传动装置的转动惯量可简化到构件的惯量项中,各关节间摩擦力矩B的对折叠式动臂工作装置多体系统的关节力矩的影响不大,因此可在计算时对其进行忽略。具体各计算项的表述如下:
式中:Ip为构件p的伪惯量矩阵;g为重力加速度向量,由于在折叠式动臂工作装置系统基坐标系中重力方向设置为-y,所以g =[0,-g,0,0];prp为构件p的质心在构件p上建立的坐标系中的坐标参数;符号Trace表示矩阵的迹,即矩阵对角元素之和;由于本系统中,两两相连的构件组成的三个关节变量都是旋转关节,因此,关节变量参数qi即为关节转角参数θi。
2 刚柔耦合运动仿真
在以往的折叠式液压挖掘机的研究中通常将工作装置视为刚体系统进行分析研究。但是在实际工况下,折叠动臂工作装置是一个多柔性体系统。如果不考虑柔性体对整个工作装置的影响,进行折叠动臂工作装置系统的动力学分析,往往不能精确地反映出实际工况下的系统运动情况和系统控制。同时对于折叠动臂工作装置的各个构件的运动、受力情况、内部应力变化也难以反映出实际工况下的精度。因此,要准确分析得出运动中折叠动臂工作装置的应力应变情况,就不能将工作装置当作刚性系统来处理。但是如果完全将工作装置当作柔性体处理,将会使设计计算的成本过高,反而不利于现实生产情况。考虑到折叠动臂工作装置的斗杆受外部载荷的影响最为突出,且刚度相对较小,在实际生产中往往以疲劳断裂为主。将斗杆作为柔性体,前后动臂和铲斗作为刚体来建立刚柔耦合模型。柔性体与仿真分析流程如图1所示。
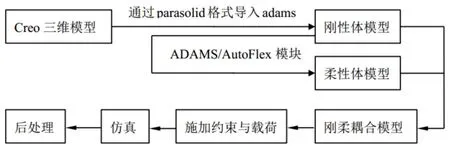
图1 刚柔耦合模型建立流程图
文章构建折叠动臂工作装置的刚柔耦合模型进行仿真后,运用Durability基础模块的HotspotsTable得到斗杆柔性体的最大受力节点的编号、相对于原始坐标的空间位置、最大应力以及应力最大时的时间。斗杆柔性体的节点数据按照应力从大到小顺序排列的信息表如图2所示。

图2 斗杆柔性体节点信息
由图2可知,斗杆上应力最大节点为node-14299,进入Nodal Plots界面输入斗杆应力最大的节点编号,就可以得到相应节点动态应力的输出曲线,如图3所示。
斗杆柔性体节点node-14299的动态应力在仿真开始时,由于受到驱动加载、重力、转动惯量等的影响而出现剧烈波动。在1.5s时随着挖掘阻力的增加应力随之波动增加;在2.4s时其应力值达到最大值256MPa;在3.8s时随着挖掘阻力的卸载应力节点node-14299一直在低应力范围波动;在7.8s时卸载完成,有一个低应力阶段的突变振动。该仿真曲线在开始阶段(0~1.5s),由于驱动载荷、自重和自身惯量的加载出现了大幅值波动,此阶段是系统响应阶段,从1.5s挖掘阻力的加载开始都能与实际工况都能相互吻合。从上述分析可知,在0.12s和2.4s时均出现了最大应力。t=0.1210s和t=2.4035s时的斗杆柔性体应力云图如图4~图5所示。

图3 斗杆柔性体节点14299时间应力曲线
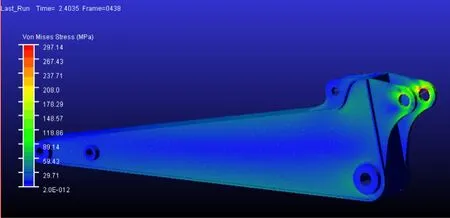
图4 t=2.4035s时斗杆柔性体应力云图

图5 t=0.1210s时斗杆柔性体应力云图
从最大卸载高度、挖掘深度工况仿真结果可以得出斗杆柔性体的应力变化趋势:斗杆最大应力受载节点都位于与斗杆油缸铰接处的耳板上,该处也是工作装置在现实作业中容易出现疲劳损伤的位置。通常对该耳板需要进行结构强化,加大耳板的厚度能有效降低该处的应力值;或者对耳板材料进行强化,通过喷丸、辑压、氧化等表面强化处理,以提高材料表面的疲劳强度。
3 斗杆关键铰点受力分析
对斗杆的关键铰点进行受力分析是铰点连接处的销轴和润滑装置设计的重要依据,文章对折叠动臂斗杆的三个铰点(斗杆与铲斗、斗杆与铲斗液压杆、斗杆与前动臂)进行刚性体与柔性体的对比分析。仿真时间设置成11s,steps设置成2000。先后对折叠动臂工作装置进行斗杆刚性体仿真和斗杆柔性体仿真。选取JOINT_21(斗杆与前动臂铰点)、JOINT_25(斗杆与铲斗油缸铰点)、JOINT_30(斗杆与铲斗铰点)三个约束生成其受力曲线,如图6~图11所示。

图6 斗杆刚性体与前动臂铰点受力曲线

图7 斗杆柔性体与前动臂铰点受力曲线

图8 斗杆刚性体与铲斗油缸铰点受力曲线
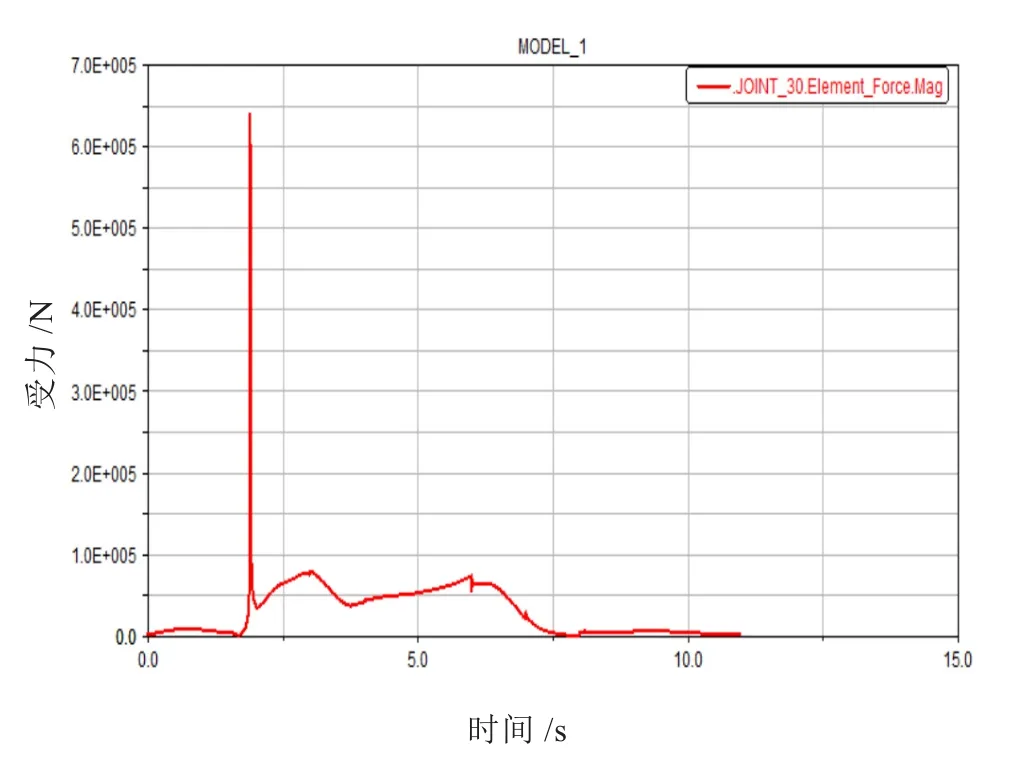
图10 斗杆刚性体与铲斗铰点受力曲线
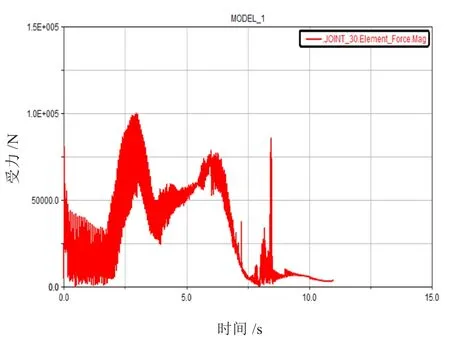
图11 斗杆柔性体与铲斗铰点受力曲线
由图6~图11可知,斗杆刚性体和斗杆柔性体仿真得出的斗杆三个铰点的受力曲线大致走势基本上相同,斗杆柔性体仿真曲线可看成以斗杆刚性体仿真曲线为走势的波动曲线;斗杆柔性体仿真得出的铰点受力曲线值均大于刚性体仿真曲线。
在整个最大挖掘、卸载工况仿真中,在自重、惯性力和外载荷作用下,铰点受力曲线波动的比较明显,且在0~4s内的波动程度都比较剧烈,后续波动比较平缓。0~4s内的剧烈波动可分为2个阶段:0~2s响应波动阶段,仿真初始各项参数的加载和各组油缸依次开始动作时的冲击,仿真软件需要对其有一个响应时间,因此这一阶段的仿真曲线与现实情况会有一定差异。2~4s外载荷加载波动阶段,这一阶段外载荷变化剧烈(挖掘阻力从零到最大值再到零,挖掘物重由零到最大值),系统对其响应波动与实际情况相符。
在斗杆与铲斗的受力曲线图10~11中,刚性体系统仿真曲线在1.5s时有一个受力突变阶段。此时刻正好是外载荷开始加载点,刚性体系统对其响应过激,无法反映出挖掘负载逐步加载的实际情况。而柔性体曲线随着外载荷的加载波动上升;在7.8s时刻挖掘物重完全卸载且卸载时间较短,柔性体曲线此阶段波动反映出快速卸载时铰点受力变化情况,刚性体曲线对快速卸载阶段响应平缓受力曲线接近零。刚柔耦合模型较刚性体模型仿真更接近实际作业中的真实受载情况,且对外载荷的响应更加灵敏不失真。
4 结论
利用多体动力学分析软ADAMS件对折叠动臂工作装置进行了刚性体系统、刚柔耦合系统动态特性仿真分析。将三维模型导入ADAMS进行仿真前处理、约束设置,按照前文分析的加载挖掘负载和驱动载荷。在Auto Flex模块中生成斗杆柔性体后进行刚柔耦合仿真。得出了斗杆在最大挖掘、卸载工况下的受力情况;分析了最大受力节点node-14299的应力变化曲线,根据此节点的应力变化曲线得出最大受力时刻t=0.1210s和t=2.4035s的斗杆柔性体应力云图,分析得出结构受载最恶劣部位位于斗杆与斗杆油缸铰接处的耳板上。最后分析比较了刚柔耦合系统与刚体系统的斗杆关键铰点的受力变化,得出刚柔耦合系统比刚性体系统仿真数据更为接近实际工况中的作业情况。

猜你喜欢
起重运输机械(2022年19期)2022-11-05
机械管理开发(2022年7期)2022-08-08
当代陕西(2022年5期)2022-04-19
探索科学(学术版)(2020年9期)2021-01-20
装备维修技术(2020年3期)2020-11-20
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
河南科学(2020年3期)2020-06-02
建筑机械(2018年11期)2018-11-22
金属加工(热加工)(2018年10期)2018-10-26
