
一种乒乓球颠球机器人的设计
2020-10-26 06:51陈昊汪林玉杨磊刘童
机电信息 2020年26期
关键词:机械臂
陈昊 汪林玉 杨磊 刘童
摘要:根据颠球运动的特点,设计了乒乓球颠球机器人软硬件。乒乓球颠球机器人主要由机械臂、深度传感器、PC、单片机组成。深度传感器获取乒乓球图像信息,并将该信息传给PC,PC利用图像信息解算乒乓球实时三维位置信息,并结合乒乓球的动力学模型预测乒乓球轨迹,将该轨迹信息传给单片机,单片机根据乒乓球轨迹信息控制机械臂颠球。乒乓球颠球机器人为机器人智能控制提供了参考。
关键词:机械臂;乒乓球空间定位;轨迹预测;颠球控制
0 引言
颠球是指通过腿、手或工具让球在竖直面内做上下往复运动。颠球机器人属于服务机器人下的娱乐机器人分支,以供人观赏、娱乐为目的。乒乓球颠球机器人集多种技术于一身,如机械臂控制技术、运动目标识别定位预测技术、动态系统控制技术等,这些技术可以方便地移植应用到其他领域,为智能机器人的研究提供参考。
1 乒乓球颠球机器人本体设计
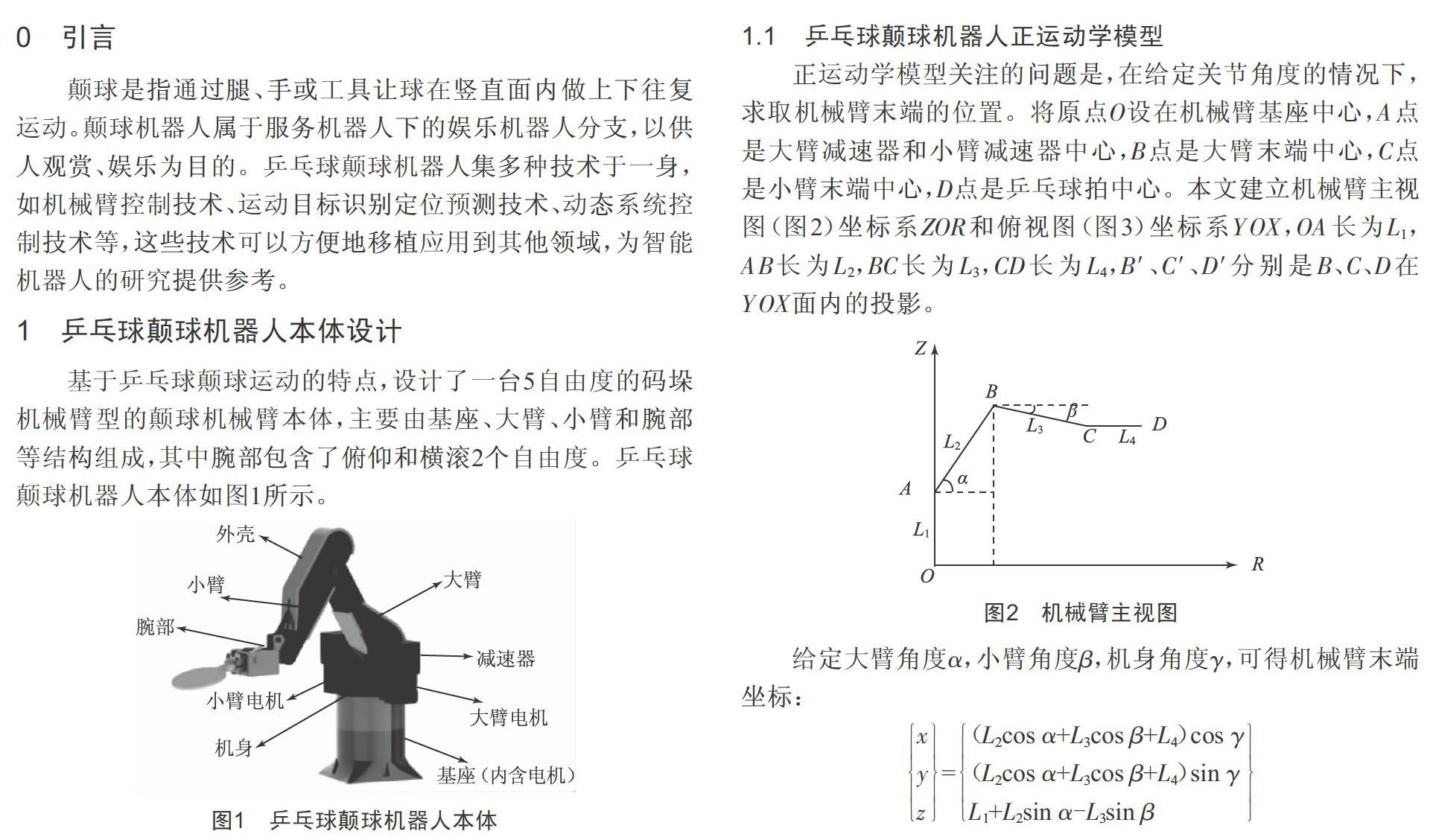
基于乒乓球颠球运动的特点,设计了一台5自由度的码垛机械臂型的颠球机械臂本体,主要由基座、大臂、小臂和腕部等结构组成,其中腕部包含了俯仰和横滚2个自由度。乒乓球颠球机器人本体如图1所示。
1.1 乒乓球颠球机器人正运动学模型
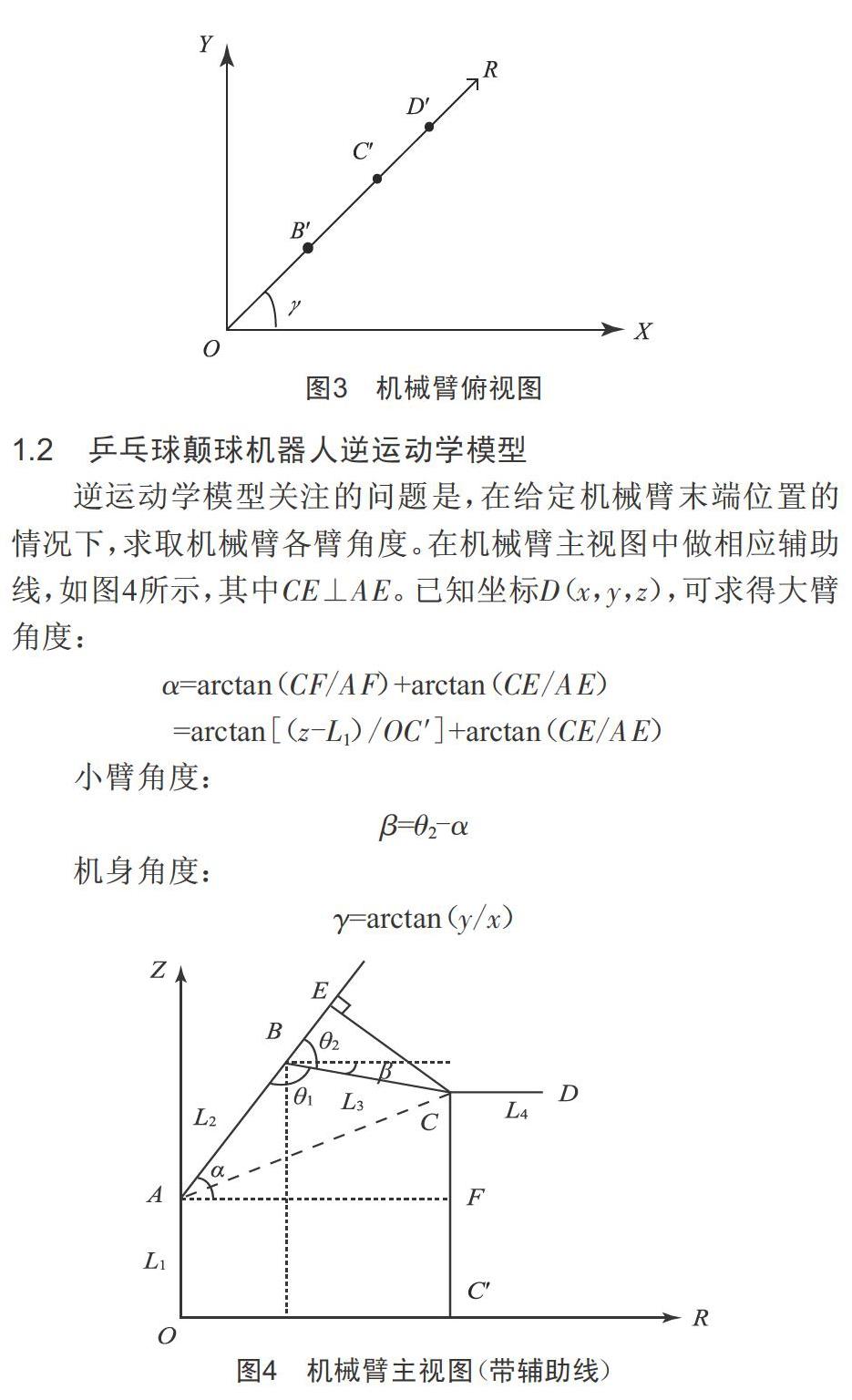
正运动学模型关注的问题是,在给定关节角度的情况下,求取机械臂末端的位置。将原点O设在机械臂基座中心,A点是大臂减速器和小臂减速器中心,B点是大臂末端中心,C点是小臂末端中心,D点是乒乓球拍中心。本文建立机械臂主视图(图2)坐标系ZOR和俯视图(图3)坐标系YOX,OA长为L1,AB长为L2,BC长为L3,CD长为L4,B′、C′、D′分別是B、C、D在YOX面内的投影。
给定大臂角度α,小臂角度β,机身角度γ,可得机械臂末端坐标:
xyz=(L2cos α+L3cos β+L4)cos γ(L2cos α+L3cos β+L4)sin γL1+L2sin α-L3sin β
1.2 乒乓球颠球机器人逆运动学模型
逆运动学模型关注的问题是,在给定机械臂末端位置的情况下,求取机械臂各臂角度。在机械臂主视图中做相应辅助线,如图4所示,其中CE⊥AE。已知坐标D(x,y,z),可求得大臂角度:
α=arctan(CF/AF)+arctan(CE/AE)
=arctan[(z-L1)/OC′]+arctan(CE/AE)
小臂角度:
β=θ2-α
机身角度:
γ=arctan(y/x)
2 控制电路设计
控制电路需要为系统各部分提供稳定的电源,保证系统能够稳定工作。该系统有4种电压:(1)220 V电压来自于电网,为摄像头、PC、开关电源1、开关电源2供电;(2)60 V电压来自于开关电源1,为步进电机驱动供电;(3)5 V电压来自于电脑,为角度传感器、单片机、遥控器供电;(4)6 V电压来自于开关电源2,为舵机供电。手持控制器用于手动控制机械臂,方便机械臂的调试。角度传感器用于反馈机械臂的手臂角度。单片机是整个系统的控制核心,它可以与PC、角度传感器、遥控器相互通信,可以驱动步进电机,给舵机发出控制信号。该系统各部分都采用了独立供电电源,减少了系统各部分之间的干扰。
3 机器视觉设计
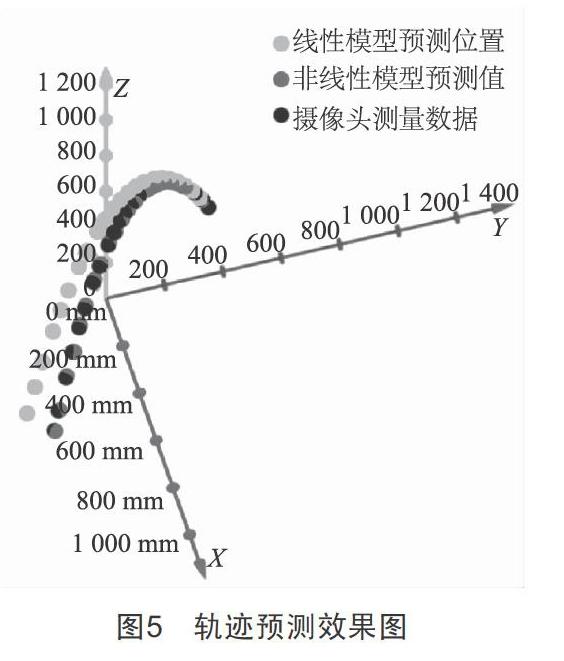
为了实现稳定颠球,机器人需要通过机器视觉完成乒乓球的识别、空间定位和轨迹预测功能,其中乒乓球的空间定位是核心问题,而实现空间定位的关键是获取深度数据,即获得目标到传感器的距离。机器人通过对乒乓球的颜色识别和形状识别,确立乒乓球在图像上的位置,通过深度相机获取该位置的深度数据,求得乒乓球的空间位置,最后采用基于线性或非线性模型的轨迹预测模型,预测乒乓球轨迹。轨迹预测效果如图5所示,轨迹预测平均误差为12 mm。
4 颠球控制策略
设定乒乓球击打平面和球拍初始平面;预测乒乓球到达击打平面时的位置、速度、时间;主控系统根据乒乓球在击打平面的状态信息,控制球拍到达预测击打位置的正下方,然后控制球拍竖直向上运动,并同时控制球拍姿态和速度;最后球拍竖直向下运动返回球拍初始平面。乒乓球与球拍碰撞后会有能量损失,如果球拍始终保持静止,显然乒乓球最终会停止运动,所以碰撞时球拍需具有一定速度。球拍达到一定速度是需要时间的,所以每次弹球的高度不能太低。由于机器人视觉探测范围有限,乒乓球的弹球高度也不能太高,本项目将乒乓球弹球的高度设定为0.5 m。机械臂的工作空间是一定的,而且在工作空间边缘,机械臂的运动性能也有所下降,所以机器人需要在机械臂有更好运动性能的工作空间内进行颠球,即要实现稳定颠球,需对颠球后乒乓球的弹起高度以及乒乓球在击打平面的落点位置加以控制。
5 结语
本文阐述了乒乓球颠球机器人的本体设计、控制电路设计、机器视觉设计要点和颠球控制策略,乒乓球颠球机器人是一个典型的实时智能系统,它所采用的技术可以直接移植应用到机器人研究的其他相关领域,具有很高的科研价值。
[参考文献]
[1] 谭民.先进机器人控制[M].北京:高等教育出版社,2007.
[2] 季岁阳.乒乓机器臂的电气设计和实时系统开发[D].杭州:浙江大学,2011.
[3] 李金泉,杨向东,付铁.码垛机器人机械结构与控制系统设计[M].北京:北京理工大学出版社,2011.
[4] 向瑞.乒乓球机器人控制系统及击打策略研究[D].哈尔滨:哈尔滨工业大学,2011.
[5] 章逸丰.快速飞行物体的状态估计和轨迹预测[D].杭州:浙江大学,2015.
收稿日期:2020-09-01
作者简介:陈昊(1992—),男,四川成都人,实验师,研究方向:自动化、机器人。
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19
