
煤块搬运机器人谐波减速器有限元仿真
2020-11-02 07:23聂勇军
山东农业大学学报(自然科学版) 2020年5期
聂勇军
广州航海学院 机械工程系,广东 广州 510725
煤块搬运机器人作为煤炭装载、运输过程中的重要机械设备,为煤炭装载、运输提供了巨大的便利。谐波减速器作为煤块搬运机器人关节处重要传动部件,为了获得结构合理、传动性能优良、温升小、振动噪声小、效率高的谐波减速器,国内外众多学者对谐波减速器相关特性进行了研究和分析;其中党选举等[1]运用SDH 模型与神经网络串联建立谐波减速器混合迟滞研究模型,对谐波减速器混合迟滞特性进行研究分析;孙韩磊等[2]对短筒柔轮谐波减速器的齿廓参数与加工工艺进行研究和分析;崔俊宽等[3]运用试验的方法研究了谐波减速器用柔性薄壁轴承加速寿命;王凯利等[4]对工业机器人谐波减速器的非线性迟滞特性进行建模与分析;王力等[5]基于Pro/E 对谐波齿轮传动刚轮进行参数化设计;牟如强等[6]基于ANSYS 对谐波齿轮短圆柱形柔轮的应力进行仿真分析;毛彬彬等[7]对谐波齿轮的齿形结构和发展进行研究分析;唐萍等[8]对谐波链传动的运动特性进行分析和研究。基于众多学者对谐波减速器的研究基础,以某型煤块搬运机器人谐波减速器为研究对象,运用有限元分析的方法对谐波减速器关键零部件进行仿真分析,为谐波减速实际应用提供参考。
1 谐波减速器组成及有限元建模
谐波减速器作为精密高性能齿轮减速器在航空、航天、航海、能源、常用军械、造船、仿生机械、电子设备、机床、仪表、交通运输、矿山冶金、石油化工机械、起重机械、农业机械、纺织机械以及医疗器械等方面得到广泛的应用。煤块搬运机器人为煤炭开采和运输提供了巨大便利,同时也将工作人员从繁重的体力活中解放出来。谐波减速器作为煤块搬运机器人关节处重要传动系统,其由谐波发生器、柔性轴承、柔性齿轮、刚性轴承等主要零部件组成。谐波发生器作用于柔性轴承,柔性轴承发生弹性变形而成为目标椭圆;变形后椭圆柔性轴承作用于柔性齿轮,柔性齿轮发生变形也为椭圆。变形后椭圆柔性齿轮长轴与刚性齿轮完全啮合,椭圆柔性齿轮短轴与刚性齿轮完全脱开,运动和动力通过啮合柔性齿轮与刚性齿轮进行相互传递。建立煤块搬运机器人谐波减速器三维模型保存为中间格式导入有限元仿真软件中得到谐波减速器有限元网格模型如图1 所示。
由图1 可知,在谐波减速器有限元网格模型中,有624196 个单元,921469 个节点。模型中谐波发生器和刚性齿轮材料为45#钢,密度为7850 kg/m3、弹性模量为198 GPa、泊松比为0.26、屈服强度≥355 MPa;柔性齿轮和柔性轴承材料为40CrNiMoA 钢,密度为7830 kg/m3、弹性模量为209 GPa、泊松比为0.28、屈服强度≥835 MPa。对图1 建立的谐波减速器有限元模型中的谐波发生器加载500 N.m 扭矩实际工况,仿真计算得到谐波减速器整体及各部件等效应力和变形如下文所示。

2 有限元仿真结果与分析
仿真计算得到煤块搬运机器人谐波减速器等效应力及总变形如图2 所示。

图2 煤块搬运机器人谐波减速器等效应力及总变形Fig.2 Equivalent stress and total deformation of coal handling robot harmonic reducer
由图4 可知,在实际工况下,谐波减速器最大等效应力主要分布在谐波发生器与柔性轴承接触部位、柔性轴承滚珠与轴承内外圈及柔性齿轮与刚性齿轮啮合部位,最大等效应力为132.58 MPa,相对于谐波发生器和刚性齿轮材料为45#钢,静态安全系数为355/132.58=2.68,相对于柔性齿轮和柔性轴承材料为40CrNiMoA 钢,静态安全系数为835/132.58=6.30 均满足实际运行条件。在实际工况下,谐波减速器最大总变形在不同部件上分布位置不同,最大总变形为0.015031 mm,整体总变形较小满足实际煤块搬运机器人谐波减速器刚性要求。
为了对煤块搬运机器人谐波减速器重要零部件在实际工况下等效应力和总变形情况。仿真计算得到谐波减速器谐波发生器等效应力及总变形如图3 所示。
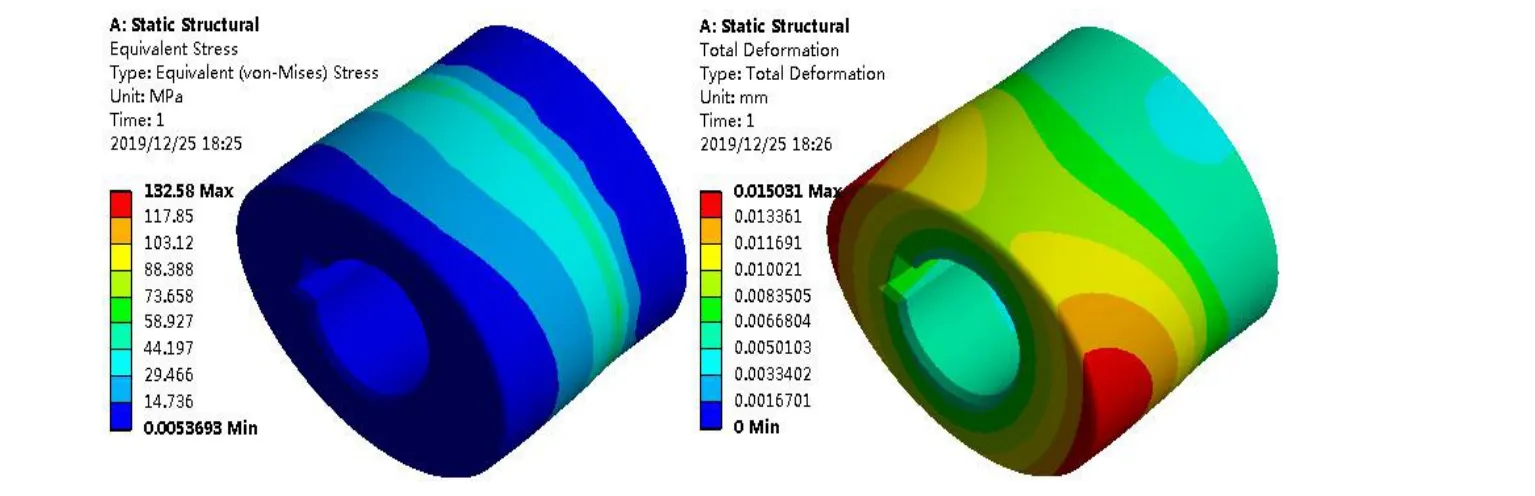
图3 谐波减速器谐波发生器等效应力及总变形Fig.3 Equivalent stress and total deformation of harmonic reducer harmonic generator
由图3 可知,在实际工况下,谐波减速器谐波发生器最大等效应力主要分布在谐波发生器与柔性轴承接触部位;最大总变形主要发生在谐波发生器靠近输入侧变形后椭圆的长轴面。
仿真计算得到谐波减速器柔性轴承等效应力及总变形如图4 所示。由图4 可知,在实际工况下,谐波减速器柔性轴承最大等效应力主要分布在柔性轴承内圈与变形后椭圆谐波发生器接触面,滚珠与轴承内外圈接触面;最大总变形主要发生在变形后椭圆柔性轴承内圈长轴处。
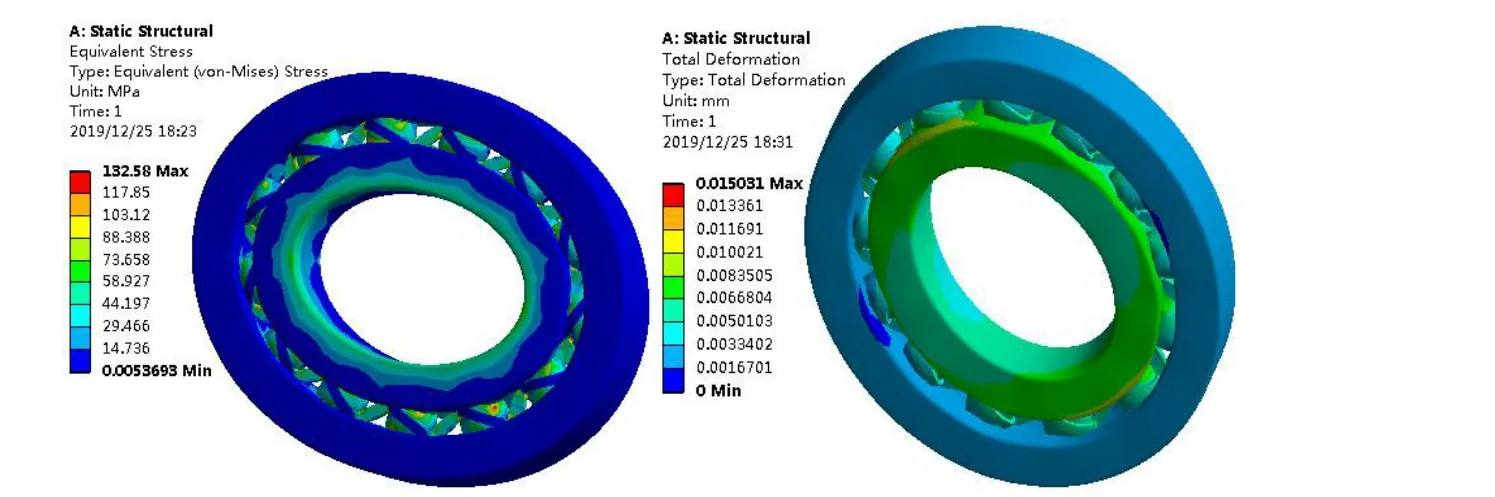
图4 谐波减速器柔性轴承等效应力及总变形Fig.4 Equivalent stress and total deformation of harmonic reducer flexible bearing
仿真计算得到谐波减速器柔性齿轮等效应力及总变形如图5 所示。

图5 谐波减速器柔性齿轮等效应力及总变形Fig.5 Equivalent stress and total deformation of harmonic reducer flexible gear
由图5 可知,在实际工况下,谐波减速器柔性齿轮最大等效应力主要分布在刚性齿轮与变形后椭圆长轴柔性齿轮啮合齿面处;最大总变形主要发生在变形后椭圆柔性齿轮长轴处。
3 结轮
针对煤块搬运工作条件极其恶劣、体力需求大等难题,煤块搬运机器人应运而生。谐波减速器作为煤块搬运机器人关节重要传动系统,直接影响煤块搬运机器人使用寿命、整机性能及重复精度。为了获得综合性能优良的煤块搬运机器人,以某型煤块搬运机器人谐波减速器为研究对象,运用有限元分析的方法对谐波减速器实际工况下的等效应力和总变形进行仿真分析,为煤块搬运机器人谐波减速器传动性能的提高、疲劳寿命的增加提供有意的参考。
猜你喜欢
消费电子(2022年6期)2022-08-25
汽车实用技术(2022年13期)2022-07-19
锻压装备与制造技术(2022年3期)2022-07-18
云南电力技术(2021年6期)2022-01-18
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
环球时报(2020-12-25)2020-12-25
防爆电机(2020年3期)2020-11-06
文萃报·周五版(2020年10期)2020-03-23
环球时报(2020-03-05)2020-03-05
小朋友·聪明学堂(2020年3期)2020-02-22
