基于BIM+三维激光扫描技术的大跨度转体斜拉桥钢球铰精细化安装管理研究
2020-11-11 08:06郭树彬
工程管理学报 2020年5期
郭树彬
(中铁二十二局第一工程有限公司,黑龙江 哈尔滨 150000,E-mail:137277398qq.com)
随着我国铁路运营里程的增加,新建桥梁越来越多地需要跨越既有运营铁路线。为了减少桥梁施工对铁路的干扰,工程上可以采用转体施工技术[1]。桥梁转体施工的成败取决于球铰,对球铰制造及安装进行监控是十分必要的[2]。目前,国内桥梁转体工程多通过 BIM 技术的三维可视化功能建立相关模型,模拟并指导球铰安装。但是根据设计图纸建立的BIM模型不能反映球铰制造和拼装误差,无法快速获取为弥补相应球铰误差对钢骨架进行调整所需的标高数据。因此,提出一种将 BIM+三维激光扫描技术应用于球铰安装精度控制的新思路。
BIM 技术结合三维激光扫描技术在国内工程实践中已有一定应用。秦国成等[3]利用BIM结合三维激光扫描技术采集异形幕墙基础数据,加快了设计周期。周成益[4]在南京禄口机场T1航站楼改扩建工程中应用 BIM+三维激光扫描技术对施工进度进行管理,避免了延期、超预算等问题。訾昕媚[5]基于 BIM+三维激光扫描技术构建了安化县文庙数字化文物保护平台。刘莎莎[6]通过分析三维激光扫描点云数据与BIM模型,快速得到建筑物实际进度与计划进度的精确偏差。张丽等[7]基于移动三维激光扫描技术,提出了一种可识别隧道环片的隧道位移监测方法。上述研究对于 BIM+三维激光扫描的应用提供了有力的参考,但同时可以看出 BIM+三维激光扫描技术目前在基建领域多用于建筑设计和施工进度管理,很少应用于桥梁工程。
随着桥梁结构的日渐复杂,快速准确地获取桥梁构件的施工数据,提前模拟施工并分析误差对于提升桥梁构件安装工程的施工效率具有极大的现实意义[8-9]。鉴于此,本文通过对哈尔滨哈西大街打通工程转体斜拉桥球铰进行三维激光扫描,根据获得的点云数据建立构件模型,与前期建立的BIM模型进行比对,获得球铰的制造及拼装误差;通过虚拟预拼装获取钢骨架调整所需的标高,为实际施工提供参考。
1 工程背景及技术路线
哈西大街打通工程跨铁路桥梁全长 434m,采用(118+198+118)m双塔双索面斜拉桥结构,半漂浮支承体系(见图1)。桥梁跨越哈南站48条铁路线,铁路运输繁忙,可供转体施工的天窗期极少。为保证既有铁路线运营安全,减少施工过程对既有铁路线的干扰,斜拉桥连续梁采用转体施工方式。转体结构由下承台、球铰、上承台、转体牵引系统组成。其中9号墩转体段长度196m(97m+99m),需逆时针转体79.31°;10号墩转体段转体长度204m(97m+107m),需顺时针转体96.12°。
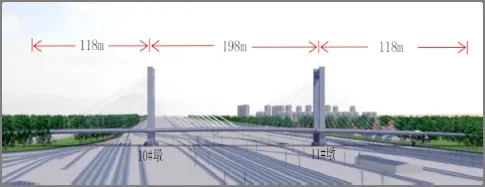
图1 桥梁示意图
斜拉桥采用平转法施工[10-11],所用钢球铰直径为 4500mm,总高度为 890mm,转体重量高达29500t,球铰直径及转体重量均位于国内前列(目前国内球铰的最大转体重量约为35000t[12])。受所跨铁路线限制,本工程为不平衡转体,对球铰的安装精度要求更高,安装中应保证球铰顶面任意点相对高差不大于1mm。为了对球铰安装进行精确控制及施工质量及安全管理,对钢球铰实施三维激光扫描,并根据所获得的点云数据建立模型,通过模型的虚拟预拼装获取球铰支架调整数据以指导实际安装工作。并根据工程实际情况,提出了相应的质量管理与安全管理方法。
在应用三维激光扫描技术过程中,为了保证扫描精度,使得相应的扫描结果能够准确反映实际工程中构件的制造误差和安装误差,需要对三维激光扫描的过程制定精细化管理流程,并依照过程严格执行。具体技术路径如图2所示。
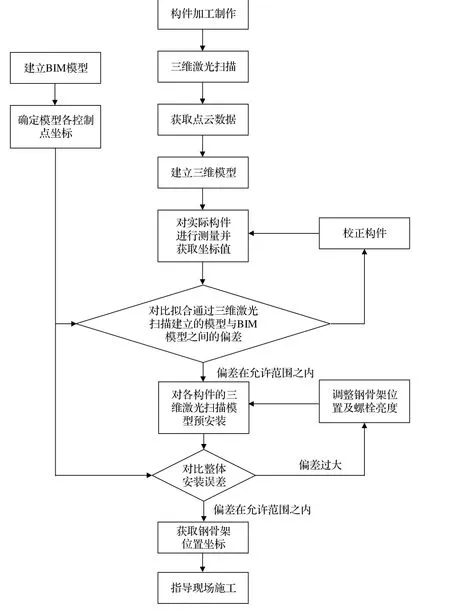
图2 技术路径图
2 三维激光扫描技术应用流程管理
三维激光扫描技术通过处理现场采集的数据形成可应用成果。本次扫描使用莱卡TS60超高精度全站仪进行,其角度测量精度为0.15mgon,单次距离测量精度为0.6mm,扫描速度为30000点/秒[13]。
为保证后期数据处理精度,在完成仪器架设和定视定向后,首先对仪器坐标系进行校对,再对下承台及钢骨架进行扫描以确定钢球铰安装环境。钢球铰的上铰盘及下铰盘加工完成后会在厂家进行拆分以满足运输需求,并在现场进行组装,待球铰组装完成后分别对上、下铰盘进行扫描。为了提高扫描精细度,每个扫描目标周边均架设6个测点,并按逆时针方向依次进行扫描,以保证相邻测点直接扫描重复率达到50%以上。全站仪通过距离定义扫描点间隔,设置斜距为 3.5806m、水平间隔为0.020m、垂直间隔为 0.020m,设置扫描范围为300m。全站仪在各个测站的设置参数与架设信息需要实时记录[14]。
扫描完成后将获取的数据导入到 3D Reshaper软件中进行预处理,由于从不同测站所获取的数据相对独立,在扫描完成后需要在同一坐标系中进行数据拼接。本次数据处理采用标靶拼接的方式,选取处于相邻测站重复扫描范围内的特定反射目标作为参照点,通过软件利用扫描点云数据的高对比度特性对多测点扫描获取的点云数据进行自动拼接。在实际操作中,完成单个扫描对象6个测站的数据拼接工作花费的时间约为 10分钟,图像拼接误差不超过1mm。拼接完成后得到单个目标的一组整体点云数据。以下球铰为例,点云拼接完成后的效果图如图3。
图3 点云数据效果图
由于扫描环境的限制,扫描过程中不可避免地会生成扫描物体之外的干扰点,同时物体本身反射特性的不均匀还会导致偏差点的出现,影响点云数据处理质量[15~17]。为了保证点云数据达到一定的精度,需要对干扰点和偏差点进行剔除,即降噪工作。在本工程的数据处理过程中,通过利用不同扫描区域反射强度值的不同对点云进行分割,通过设置反射强度阈值对分割后得到的各部分点云进行去噪处理,使需要预安装、拼合的构件点云数据得以保留。并通过对点云数据进行识别分类,纠正获取的图像。
完成数据处理后,根据所获得的点云数据利用Autodesk 3ds Max软件建立具有制造误差和拼装误差的球铰真实模型,并通过点云数据和影像数据共同保证模型的准确性与完整性,如图4所示。
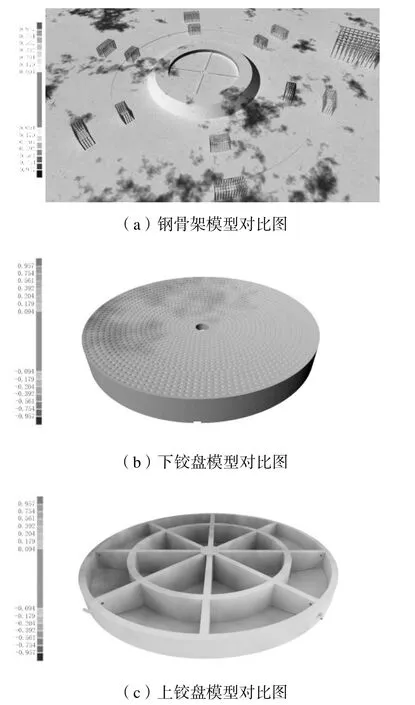
图4 钢球铰各构件三维激光扫描模型与BIM模型对比图
3 钢球铰加工精度检验
将通过三维激光扫描技术获得的点云数据所建立的钢球铰各构件模型与根据设计图纸利用BIM技术建立的三维模型进行对比,分析相应的制造误差与安装误差(见图 4),模型偏差统计如表1所示。通过对钢球铰各部件的尺寸、部分对角距离进行实际测量,测量精度需达到0.1mm以下,以检验各构件的加工精度是否满足要求。
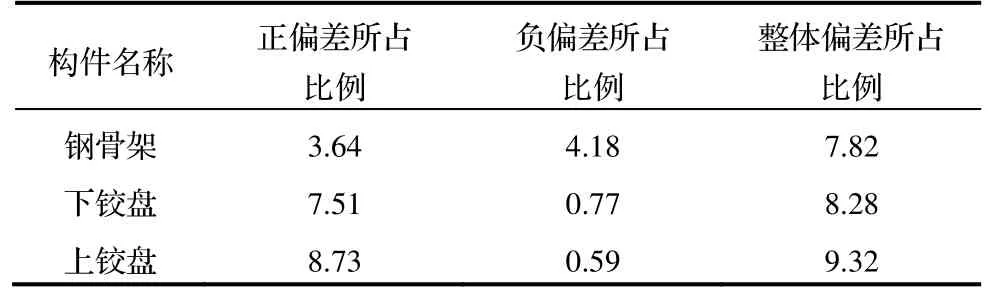
表1 模型偏差统计表 (%)
通过图4可知钢球铰各构件均存在正、负偏差,但偏差值绝对值均小于1mm。其中钢球铰钢骨架的加工误差在-0.8~0.6mm范围内,偏差所占比例为7.82%;上铰盘的加工误差在-0.7~0.4mm范围内,偏差所占比例为9.32%;下铰盘的加工误差在-0.3~0.5mm范围内,偏差所占比例为8.28%。总体来看,钢球铰各构件偏差所占比例不超过9.5%,且任意两点之间加工偏差不超过1mm,处于加工误差允许范围内,表明构件满足施工使用要求。
4 基于模拟预安装的施工质量及安全管理
4.1 模拟预拼装
对使用三维激光扫描技术所获得的单体构件模型进行施工预安装模拟,选取承台模型顶面作为参照平面,其他构件模型依次按照先安装钢骨架,再安装下铰盘,最后吊装上铰盘的施工顺序依次安装、拼合如图5所示。拼装完成后对整体模型的空间关系进行分析,通过将根据三维激光扫描所获点云建立的带有制造误差的模型与根据设计图纸建立的精确的 BIM 模型进行对比,获取安装偏差情况,同时以球铰中心销轴为原点,以东西方向和南北方向为坐标轴,推算出钢骨架关键控制点可满足安装精度需求的位置坐标如表2所示。
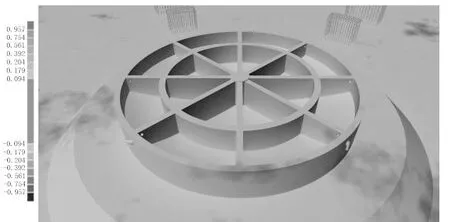
图5 完成虚拟安装的钢球铰整体模型与BIM模型对比图
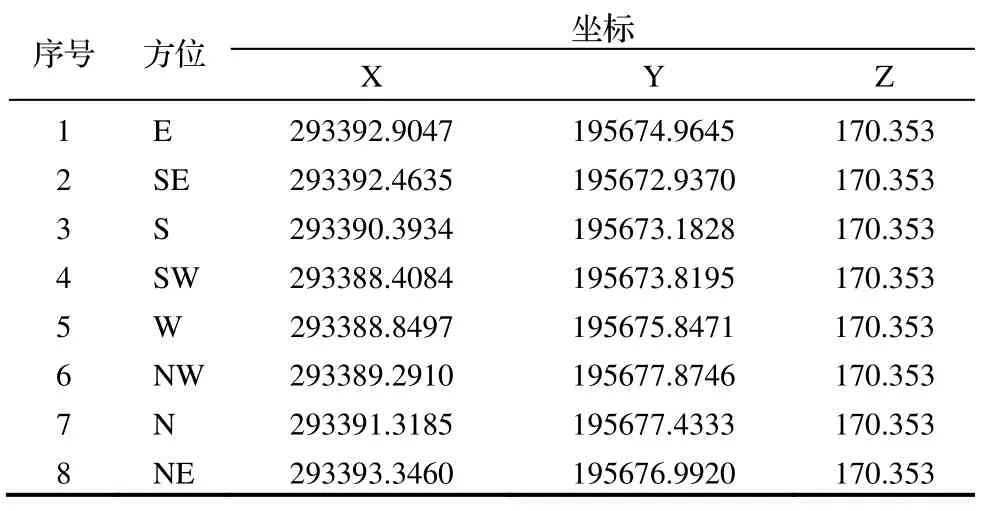
表2 钢骨架定位坐标表
在实际施工时,通过调整螺栓将钢骨架关键控制点按预拼装中获取的坐标进行调整,直至达到要求值以平衡球铰的制造及拼装误差,使球铰在安装工作过程中能够一次性满足安装精度要求,避免反复调整高程对球铰带来损伤。
4.2 球铰安装管理
本工程中球铰安装的大致过程如下:在下球铰混凝土浇注完成后,清理下球铰顶面,在销轴孔涂抹一层黄油,将定位轴吊入孔内,并保证销轴中线垂直。人工检查并在确保球铰表面及安装聚四氟乙烯滑动片的孔内没有任何杂物后,并将球面吹干,根据聚四氟乙烯滑动片的编号将其安放在相应的镶嵌孔内。在聚四氟乙烯滑动片安装完成后,于球面上各聚四氟乙烯滑动片间,涂抹黄油聚四氟乙烯粉,使黄油聚四氟乙烯粉均匀填充满聚四氟乙烯滑动片之间的空间,并略高于聚四氟乙烯滑动片,保证聚四氟乙烯滑动片顶面有一层黄油聚四氟乙烯粉。为上球铰安装做好准备。
在等待上球铰安装过程应保持球面清洁,并安排专人全程监督球铰清洁情况,严禁施工过程中将杂物带至球面上。待相关准备工作完成后,将上球铰吊起,在凸球面上涂抹一层黄油聚四氟乙烯粉,然后将上球铰对准中心销轴轻落至下球铰上,微调上球铰位置,使之水平并与下球铰外圈间隙一致,去除被挤出的多余黄油,并用宽胶带将上下球铰边缘的缝隙密封,防止杂物进入球铰摩擦部分。至此,完成球铰安装工作。
4.3 安全管理
球铰施工安全问题是影响本工程是否能顺利完成的重要因素[18,19]。在模拟预安装的过程中发现实际施工时可能会出现因吊装时吊钩脱落、施工机械相互碰撞、施工机械在施工过程中出现故障等引起的安全问题,为了防止相关安全问题在实际施工时发生,对所预见的安全问题进行风险判定并制定了以下安全措施和紧急处理:
(1)进行全员安全生产教育,并对参与现场工作的施工人员配套完整安保设备,如安全帽、安全带、安全鞋、急救设备等。
(2)起吊时采用卡环和安全吊钩,不得采用牵引起吊,吊起球铰盘时应先在较低位置处停留,待球铰盘基本停止晃动时再进行下一步操作。
(3)球铰安装施工前应对设备进行检修,如发现故障,及时维修或更换施工设备。
(4)球铰安装对于现场施工时间把控能力要求较高,具有一定的时间敏感性,因此对于施工过程中的关键设备应当增加备用设备。
(5)为了保证球铰周边结构物施工不影响球铰钢骨架的调整精度,在球铰周边施工相关结构物时应实时监测球铰钢骨架所在位置的位移情况。
(6)对于重要的施工临时结构物,必须由工程、质检、安全及监理等人员进行检查验收[20],发现问题必须整改,整改合格后方可进行下一步施工。
(7)通过在模拟安装过程中预先分析各工序中可能出现的安全问题,制订紧急事故处理对策,对各种事故的处理要有明确规定,并研讨防范及应对措施,确保一旦出现问题时,能够沉着应对、及时解决,实现项目安全管理无漏洞的目标。
4.4 质量管理
为了保证球铰安装的精确性及安装质量,采取了以下措施:
(1)做好人员培训工作。由于应用了BIM+三维激光扫描技术,基本消除了钢球铰自身制造误差的影响,因此在钢球铰实际施工过程中应当严格控制人为误差影响。通过施工模拟系统预演施工过程,对所有参与球铰安装工作的人员进行施工培训,模拟施工过程,使相关工作人员熟悉相应的施工流程和控制参数。
(2)做好现场监控工作。如现场出现了人为的安装偏差,可根据预安装控制参数及现场监控数据进行纠偏调整。通过采用先进的、可靠有效的控制方法,实现可调变量的最优调整值或控制参数的超前预控制。由于钢球铰为各个构件依次安装,使得球铰安装工作的施工误差具有累积性。因此通过精密仪器严格控制初始构件的安装误差是十分必要的,现场通过全站器等设备保证安装精度。同时还需要在现场配备经验丰富、具有高度责任心的监控人员。
(3)加强现场管理工作。在施工前与铁路部门沟通协调,确定最佳的施工时间,以防止火车行驶过程中产生振动,影响钢球铰的安装质量。同时,施工过程中在关键控制岗位上设专职人员进行管控,保证施工严格依照预定方案执行。
5 结语
本文提出了一种基于 BIM+三维激光扫描技术的大跨度不平衡转体斜拉桥钢球铰精细化安装管理方法,并在实际工程中进行了应用和验证,较好地满足了球铰安装工作的精度要求。应用基于BIM+三维激光扫描技术的大跨度不平衡转体斜拉桥钢球铰精细化安装管理方法能够将球铰安装误差控制在 1mm范围内,证明了该方法的高效性和准确性。该方法通过应用三维激光扫描技术获取了带有构件自身误差的球铰真实模型,解决了现有BIM技术不能考虑球铰制造及安装误差的问题。通过三维激光扫描技术获取的球铰真实模型与根据设计图纸建立的球铰精确模型的对比可知,球铰制造误差所占比例在 8%左右,可见考虑球铰制造误差及安装误差是十分必要的。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
昆钢科技(2021年2期)2021-07-22
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
哈尔滨轴承(2020年4期)2020-03-17
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
北方工业大学学报(2019年5期)2019-03-30
智能城市(2018年8期)2018-07-06
广西电力(2016年4期)2016-07-10
系统医学(2016年8期)2016-02-20