一体化海上测风塔浮运拖航性态分析
2020-11-13 01:52丁红岩胡睿奇张浦阳乐丛欢
哈尔滨工程大学学报 2020年8期
丁红岩, 胡睿奇, 张浦阳, 乐丛欢
(1. 天津大学 水利工程仿真与安全国家重点实验室,天津 300072;2. 滨海土木工程结构与安全教育部重点实验室(天津大学),天津 300072; 3. 天津大学 建筑工程学院,天津 300072)
作为清洁能源之一的风能因其清洁的、可再生的、储量很大的优势而具有大规模发展潜力。海上风电场的建设需要对拟建风电场位置处的风资源进行评估,为风电场建设提供客观依据,是风电场能否取得良好经济效益,达到预期收益的关键,是整个风电场开发建设的重要环节[1-2]。海上测风塔的建立在风电场前期的风资源评估、风场微观选址、风电场规划设计等方面提供资料,同时能够对风电场风况实时监测、超短期预测,对数值预报模式,预报输出数据比对和数值模式参数进行校正[3-4]。随着风电技术的发展,风机塔筒高度的提高,需要广泛的评估风能资源,对测风塔的建造也提出了新的需求。海上测风塔的使用年限较短,高度在100 m左右[5]。典型的基础结构型式有单桩基础型式、导管架基础、钢制平台基础,这些型式均存在安装设备费用高等问题[6-10]。海上测风塔基础安装施工是一项困难、复杂、耗时又费力的工作。研发一种新型海上风电测风塔基础结构,解决海上施工周期长、造价高、稳定性差等问题,对海上风资源的掌握和开发具有重要意义。
本文提出的可自浮拖航的一体式新型测风塔结构吸收了目前发展比较迅速的吸力筒型基础型式和海上一步式安装技术[11-14]。通过数值模拟分析,采用DNV-SESAM[15]程序对四边形浮筒浮箱组合基础型式进行了频域和时域的水动力分析。根据稳性校核结果优化基础型式和上部塔架高度;建立了拖航水动力模型,分析了拖航要素对结构动态响应的影响规律,并针对一体化的浮运技术进行了完整分析。
1 结构设计与数值模拟
本文以实际工程项目为研究背景,介绍了一种新型式带有浮筒和浮箱结构的四边形一体式测风塔结构。四边形结构上部塔架高度为160 m,其基础结构采用了吸力式筒裙结构和矩形浮箱的组合型式,上部塔架是四边形桁架结构。筒裙结构之间通过4个浮箱连接,筒裙结构的下裙板最终插入土体,上裙板可以施加压载。该结构整体可以自浮拖航,下沉安装时,结构依靠自重下沉,如果没有达到要求的下沉深度,可以通过浮箱注水压载增加自重。浮运过程的稳性,拖航方式以及不同海况下的运动响应是水动力分析的主要内容。
1.1 结构设计
一体式测风塔模型的结构特点为:测风塔塔架、浮箱结构及吸力式筒裙基础,组合形成的可自浮拖航的结构体系如图1所示。该结构是基于实际工程设计的,主要应用于水深40 m的海域,上部为高耸四边形桁架式塔架结构,高度110 m,连接53 m的过渡段。实际安装完成后过渡段大部分浸没在水中,拖航时上部塔架总高度为163 m。浮箱组合基础是由4个位于角点的圆形筒裙结构与4个矩形浮箱依次相连而成的组合结构。浮箱内设有加强肋板以提高浮箱刚度,肋板底部设置了进水孔。4个圆筒形裙板结构与浮箱连接,筒裙分为上下2部分裙板结构,上部裙板内侧设置有环向和径向的肋板,底部裙板为承载结构。
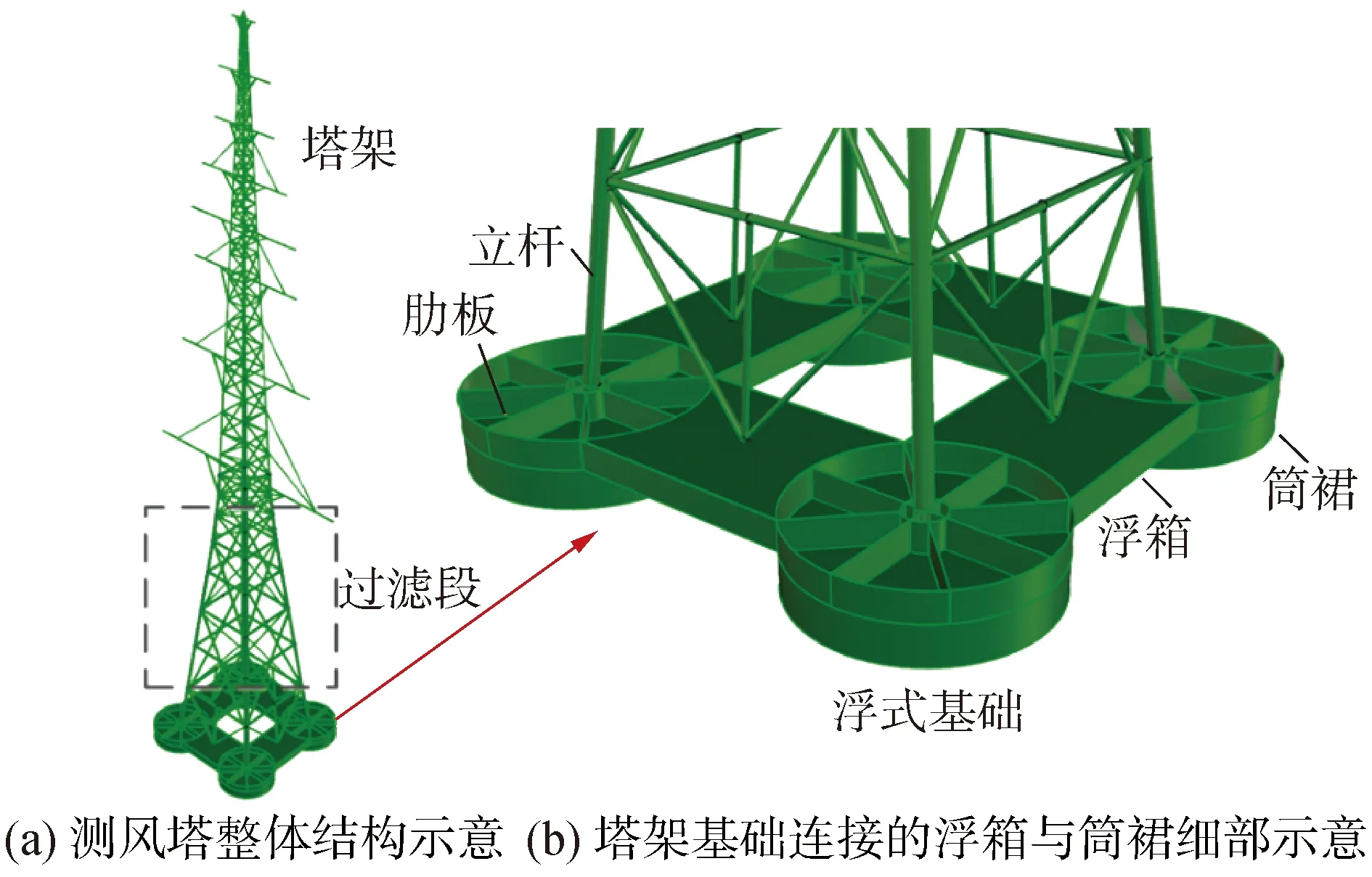
图1 数值模拟模型Fig.1 Numerical model
根据浮稳性的校核结果判断底部浮箱和筒裙结构的尺寸、连接方式在满足提供足够的回复力矩基础上,迭代优化得到适合的结构型式。优化时上部塔架结构的跟开是固定的,因此设计时需保证塔架底部8个节点能够支撑在浮箱或者筒裙顶盖上。
本文基于163 m高度的上部塔架需要满足的抗风倾力矩要求,设计了如图2所示3种基础型式。针对3种型式,分别校核其初稳性高和面积比。对于测风塔的浮式基础,结构横向、纵向尺寸一致,因此横、纵倾稳性不进行区分。通过稳性校核结果比较3种型式所能提供的回复力矩,选择出适合163 m塔架高度的基础结构型式。针对另外2种型式的浮式基础,在满足拖航过程中抗倾覆要求的前提下,给出最大可以连接的上部塔架高度的建议范围。

图2 基础型式Fig.2 Foundation models
3种基础型式设计思路为浮箱结构的型深(1.5~3 m)较一般的浮式结构偏小,因而基础吃水变化的幅度不大,故在吃水一定时,结构的稳心高与倾角无关,稳心半径仅与水线面的形状有关。
1.2 数值计算
本文采用DNV-SESAM对一体式的测风塔结构的水动力特性进行了数值模拟分析。
1.2.1 稳性分析
浮体结构受到风、浪、流荷载等外力作用会发生倾斜,外力消失后,结构能够回复到原来的平衡位置。该结构具有抗倾覆的能力,此抵抗力称为复原力,产生的效果称为复原力矩。计算结构在自浮状态下的初稳性时,采用DNV SESAM 软件的HydroD模块提供的IMO(国际海事组织)设计风谱进行风倾力矩的计算。基于初稳性的分析结果,得到能够满足稳性要求的基础型式(模型3)进一步进行破舱稳性的分析。根据不同船级社中关于一般浮式结构的稳性要求,研究结构完整稳性、破舱稳性。
波浪荷载的频率跨幅较大,包含了一般浮式结构的自振频率。因此对于一体式测风塔模型进行了频域分析,计算了不同浪向角下各个自由度的运动幅值响应算子RAO,从而得出结构在波浪力作用下的运动特性。
1.2.2 拖航分析
采用DNV-SESAM的SIMA模块对一体式测风塔拖航过程进行了时域分析,采用模块中单线耦合模拟简化系缆模型,建立系缆点,根据缆绳的特性输入相关刚度参数。将HydroD模块计算的频域水动力结果,导入SIMA模块中建立完整的拖航模型,设置环境条件,计算拖航过程的时域响应。时域计算仅考虑一阶波浪荷载,波浪、流荷载作用在结构上。影响拖航特性的因素较多,如缆绳长度、系缆点位置以及环境海况。因此针对单一海况条件(波高、周期、浪向角)和联合海况下的动力响应进行了对比分析。
1.3 边界条件
1.3.1 稳性校核
本文基于实际工程的水文资料,稳性计算是在8级风作用下的风倾力矩,即20 m/s风速海况下的稳性。鉴于该海域水深为43 m,拖航距离较近,因此没有按照中国船级社(CCS)《海上拖航指南》[16]规范中的海上浮式结构的拖航要求的沿海航区设计风速30.9 m/s来进行抗倾覆校验。国际规范中对与稳性校核的要求并不十分一致,其中《海上拖航指南》[16]要求初稳性高不小于0.3 m,面积比不小于1.4,DNV[17]要求初稳性高不小于0.5 m,复力矩与风压横倾曲线至第二交点处的两曲线所包围的面积比值不小于1.4。
1.3.2 破舱说明
分舱结构不仅可以在下沉过程中提供压载空间,还能够用于调节整体平衡。但是舱室如果发生破坏,在拖航过程中进水,此时舱内的自由液面的运动会影响外部结构的稳性,同时偏心自重会增加结构的倾覆概率。假设破舱位置的出现是随机的,分析破舱对于稳性的具体影响时,考虑分别增加进水舱的数量或者改变进水舱室的位置。本文对比了未破舱(完整)、破一舱、浮筒一半破舱,单个浮筒全破舱,以及2个浮筒各破4舱这5种情况。模型3的分舱形式及编号的示意图如图3所示。

图3 模型3的分舱示意Fig.3 Compartment scheme for model 3
1.3.3 拖航分析工况
影响拖航特性的因素较多,根据外部荷载的特点,分别研究了单一海况下,波高、周期、浪向角等因素下的拖航动力响应,同时针对缆绳长度的不同、拖缆力的大小、系缆点的位置等因素研究其拖航稳性。对单因素的工况设计主要包含以下内容:波高变化:1、2、3 m;浪向角变化:0°、45°、90°、180°;缆绳长度变化:100、150、200 m;系缆点位置Z(结合浮筒高度):水面以下(Z=-1.5 m)、水面处(Z=0 m)、水面以上(Z=1.5 m)。实际的拖航速度一般控制在3~6 kn左右,不同条件对缆绳拉力以及航速的影响情况进行了分析比较。拖航方向和浪向角的定义见图4。拖航方向与0°浪向角方向同向,称为顺浪拖航,180°浪向角与拖航方向相对,称为顶浪拖航。
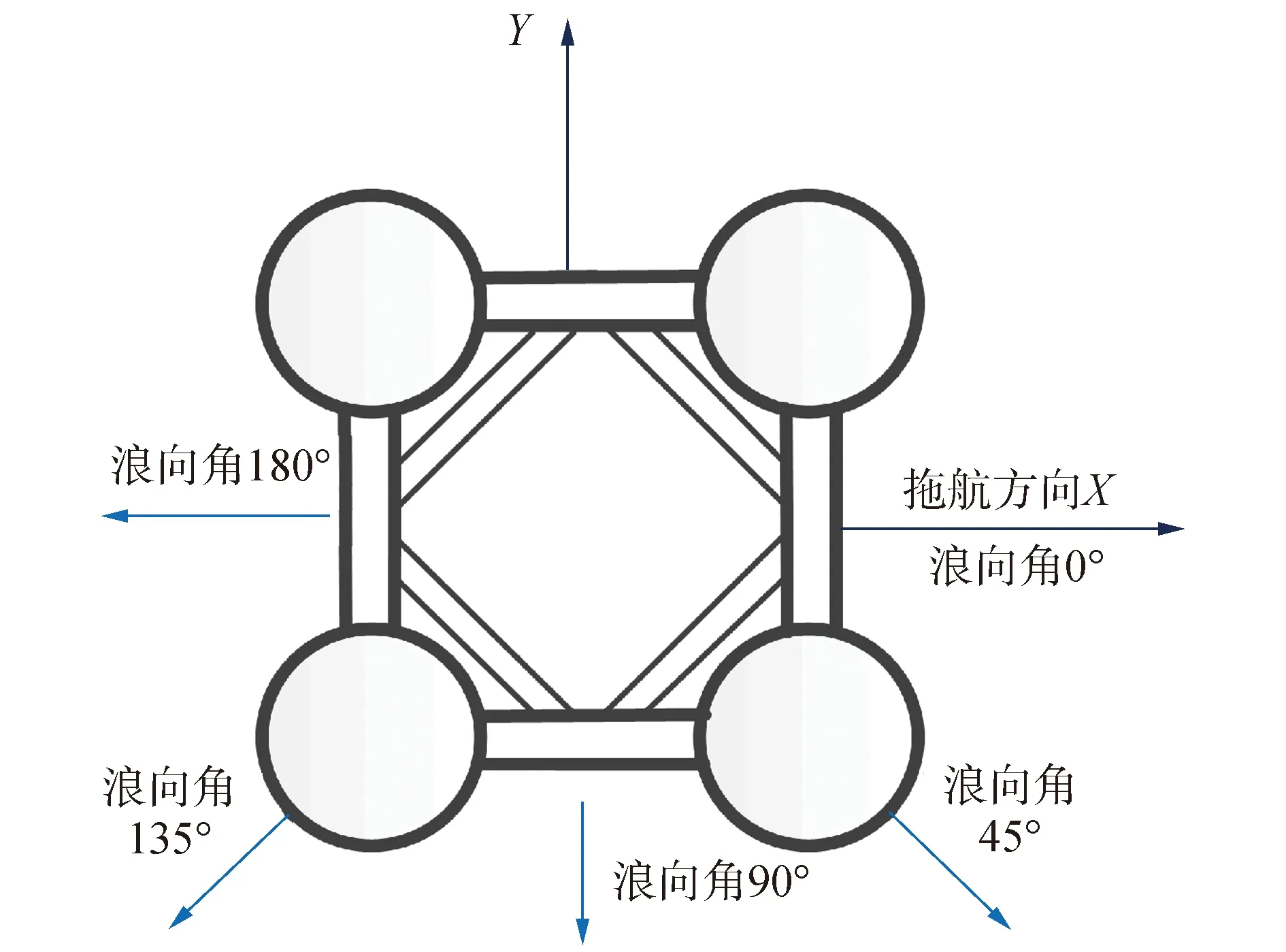
图4 拖航方向及浪向角示意Fig.4 Sketch of the towing and wave directions
1.3.4 环境荷载
实际中测风塔结构在实际拖航过程中受到风荷载、波浪流荷载的联合作用,结构的动力响应与单因素海况有很大的不同,更为复杂。针对实际工况,建立了多参数作用下的联合海况分析,联合工况的具体统计参数见表1。工作海域水深43 m,波浪的模拟选择随机波浪荷载,通过定义JONSWAP波谱参数生成,流荷载通过流速与水深的非线性关系定义。
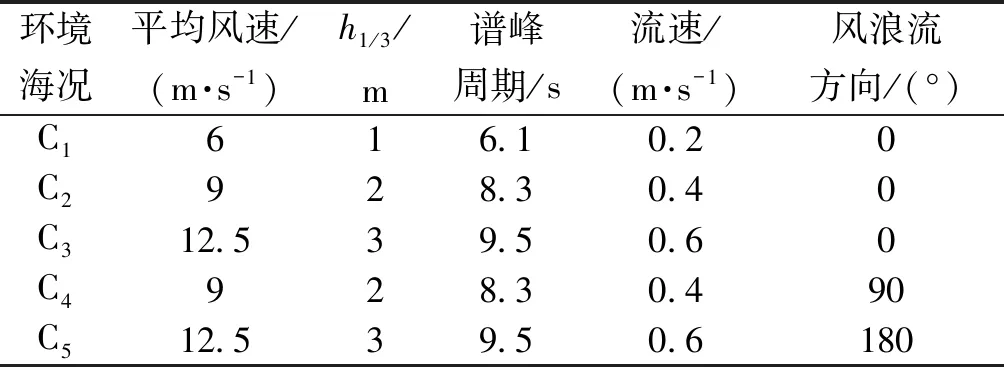
表1 联合海况参数Table 1 Joint sea states
2 数值模拟结果分析
2.1 稳性分析
2.1.1 完整稳性
针对本文提出的3种基础结构型式,在自浮不破舱的情况下,计算整体结构的初稳性情况,如表2所示。表中自重仅指基础结构,不包含塔架部分重量。图5为模型3的风倾力矩和回复力矩随倾角的变化情况。
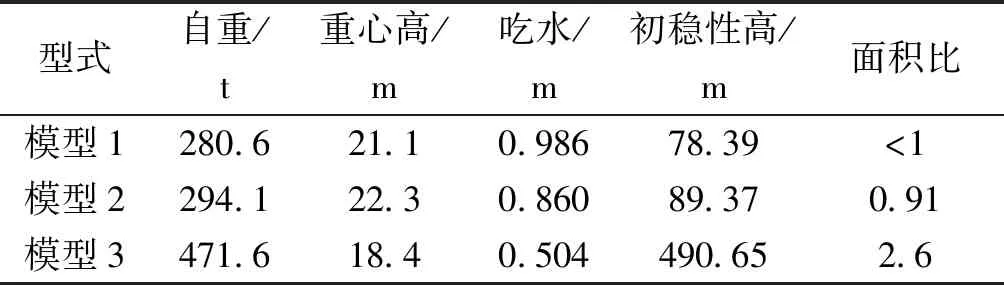
表2 初稳性对比Table 2 Initial stability comparison
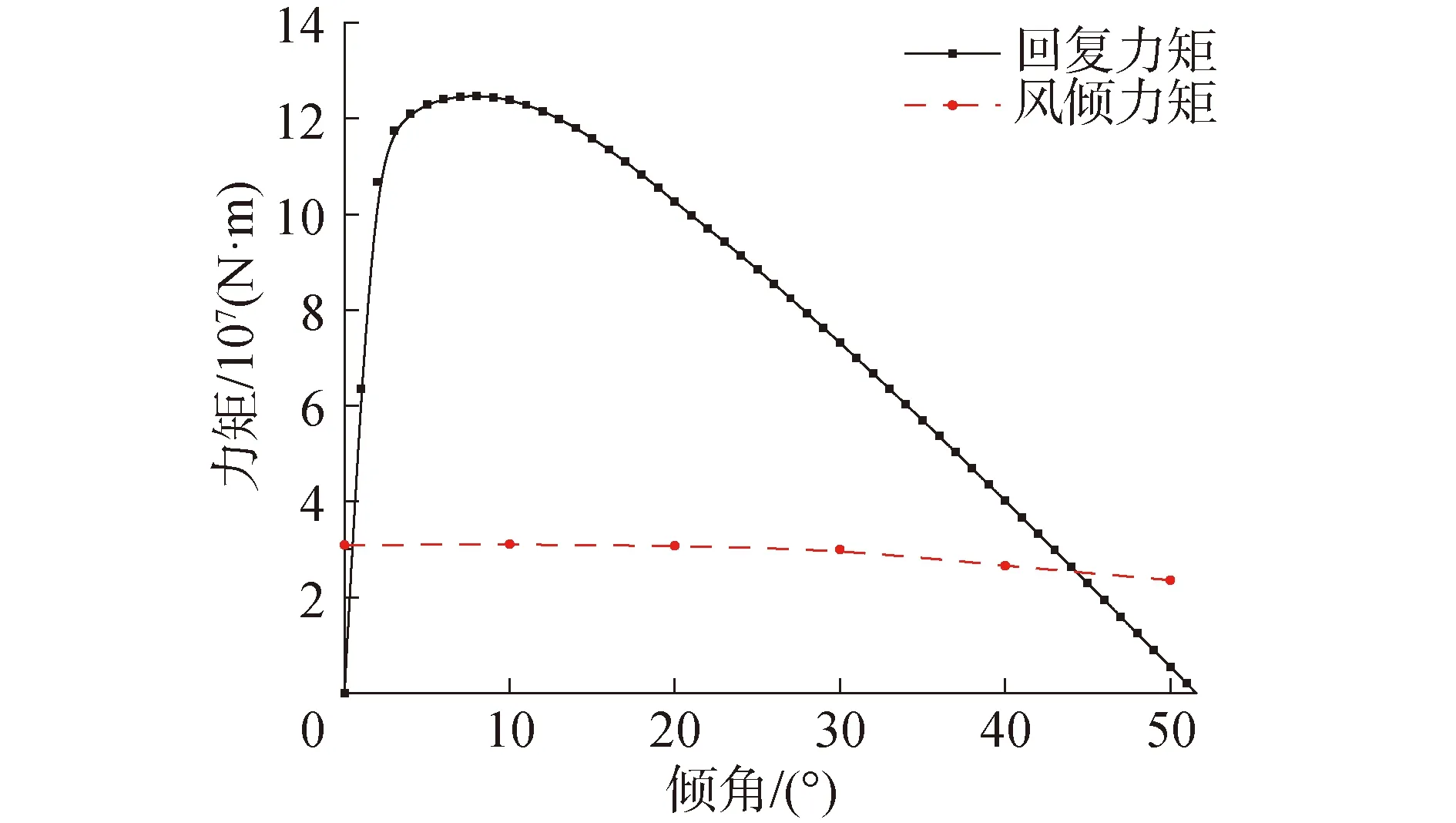
图5 模型3的风倾力矩和回复力矩曲线Fig.5 Heeling moment and righting moment curves of the model 3
由表2可知,基础受上部塔架的影响,对于抗倾覆的要求较高,3种型式初稳性高均满足规范要求,
但只有模型3的面积比大于1.4。复原力矩曲线与风倾力矩曲线的交角在小倾角范围内的模型2、3均满足要求,但模型2的面积比小于1,说明在第2交角前结构会失去平衡,即3种型式的浮箱结构只有第3种型式可以提供足够的回复力矩抵抗163 m高度的塔架结构受到的风倾力矩。
针对模型1、2,改变上部塔架高度,降低风倾力矩的极值。利用IMO提供的风谱,在设计风速为20 m/s条件下,计算稳性,使之满足规范中稳性的要求。型式1、2分别组合了140、120、100 m高的塔架,其稳性高,吃水,面积比的计算结果见表3,不同塔架高度下的回复力与风倾力矩曲线见图6。对于型式1,适用于上部塔架高度小于100 m的情况;型式2适用于塔架高度小于120 m的情况。
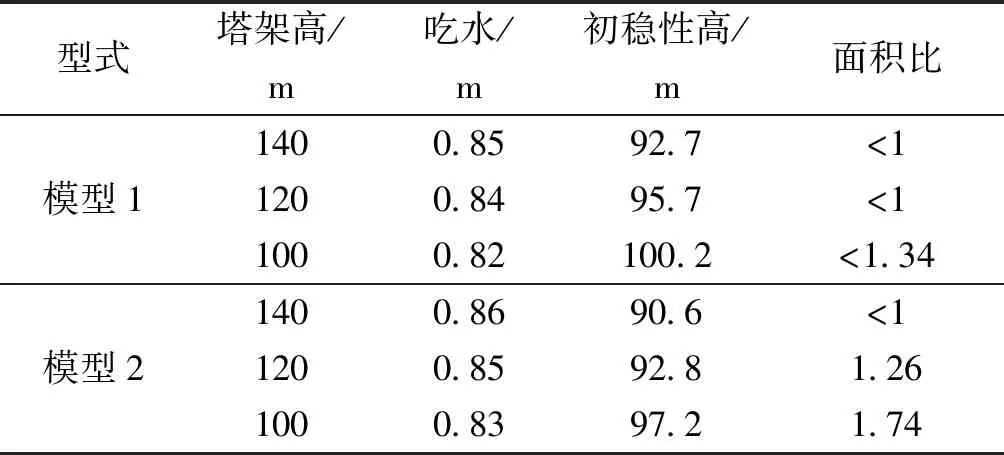
表3 模型1、2稳性分析结果Table 3 Stability analysis results for model 1 and 2
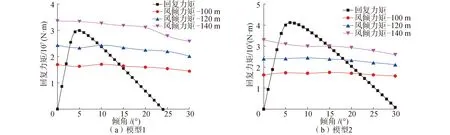
图6 不同塔架高度下的风倾力矩与回复力矩Fig.6 Heeling moment and righting moment curves under different height of the tower
2.1.2 破舱稳性
表4为模型3在不同破舱状态下的稳性对比结果。如表4所示,未破舱时稳心高度最高,但面积比不是最大。由于结构设计的分舱较多,少量的破舱反而提高了破舱稳性(面积比)。少量舱室发生破坏进水,增加结构的自重,提高抗倾覆力的大小,虽然有自由液面的影响,但综合而言,适当的压载会提高结构的抗倾覆能力。此外稳性也与结构的吃水有关,实际上少量压载能够增加结构的吃水,从而一定程度提高了结构的抗倾稳性。
表4 模型3破舱稳性对比对比Table 4 Damaged stability comparison for model 3
对比破舱位置发现,在破舱数量相同时,破舱位置集中出现在单个浮筒上的稳性要好于破舱分别发生在两个浮筒上的稳性。稳性校核结果说明针对模型3应该进一步进行优化设计,缩小水线面面积,减小浮筒的直径,减小浮筒间距,以降低成本。实际结构在保证浮箱刚度满足要求的前提下可以减少分舱数量,单筒分2~4舱即可满足压载稳性的要求,也便于下沉过程的调平实施。
2.1.3 运动响应传递函数
图7所示为模型3的幅值响应传递函数(response amplitude operator)RAO在纵荡、垂荡、纵摇3个自由度上随不同方向波浪变化的计算结果。
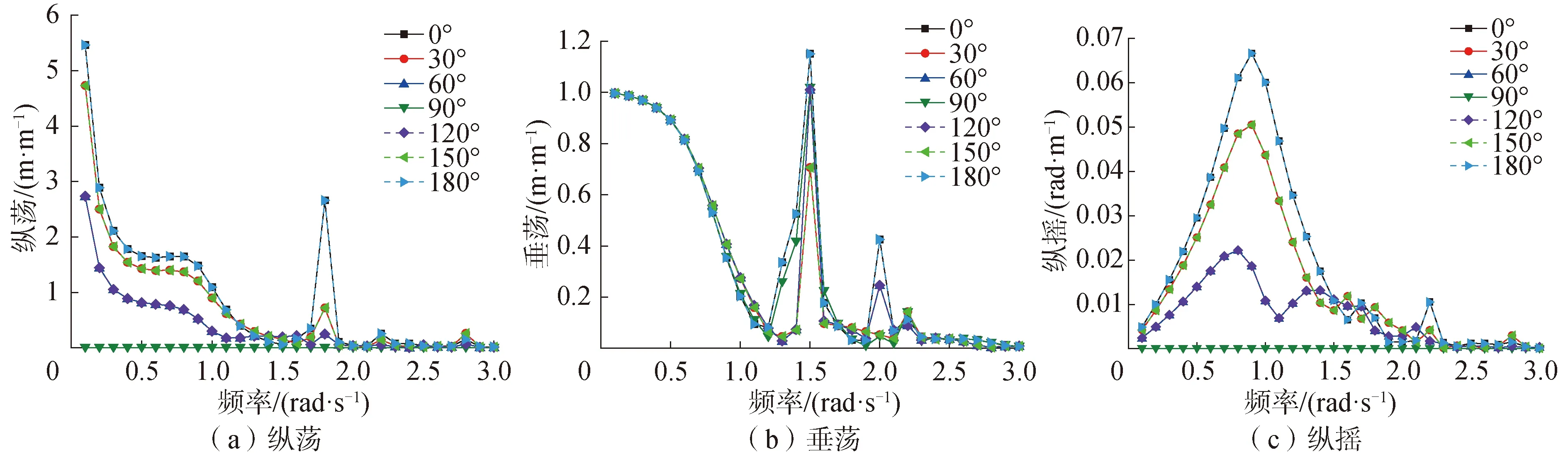
图7 不同浪向角下的运动响应传递函数Fig.7 RAO under different wave directions
可以看出,不同浪向角下测风塔结构运动响应的RAO变化趋势基本一致。其中纵荡和纵摇受浪向角的影响较为明显。纵荡和垂荡运动的响应在低频波浪范围内幅值较大。在顶浪(浪向角180°)和顺浪(浪向角0°)方向上也相较于其他方向上的运动响应最大。考虑到波频通常在0.25~1.25 rad/s范围能量最为集中,因此纵荡、垂荡和纵摇运动响应均在波浪频率范围内较为显著;不同浪向角对于垂荡运动的RAO的变化影响较小,当波浪频率为1.5 rad/s(周期约4.18 s)时,幅值响应最大;纵摇运动峰值对应的波浪频率在0.9 rad/s(周期约6.8 s),相对于平动响应的周期略长。波浪荷载传播方向沿结构纵向时(拖航方向),能最大程度的诱导浮体的振荡运动。
2.2 拖航分析
2.2.1 单因素海况
一体式测风塔结构的浮式基础的横向与纵向尺寸一致,双轴对称,横摇与纵摇运动规律一致,因此针对具有回复力矩的纵摇和垂荡响应变化情况进行对比分析,其他自由度的运动不具有回复力,其运动响应不是共振型的,此处不作分析。分析结果如图8~11所示。

图8 波高变化下的运动响应Fig.8 Dynamic responses under different wave height
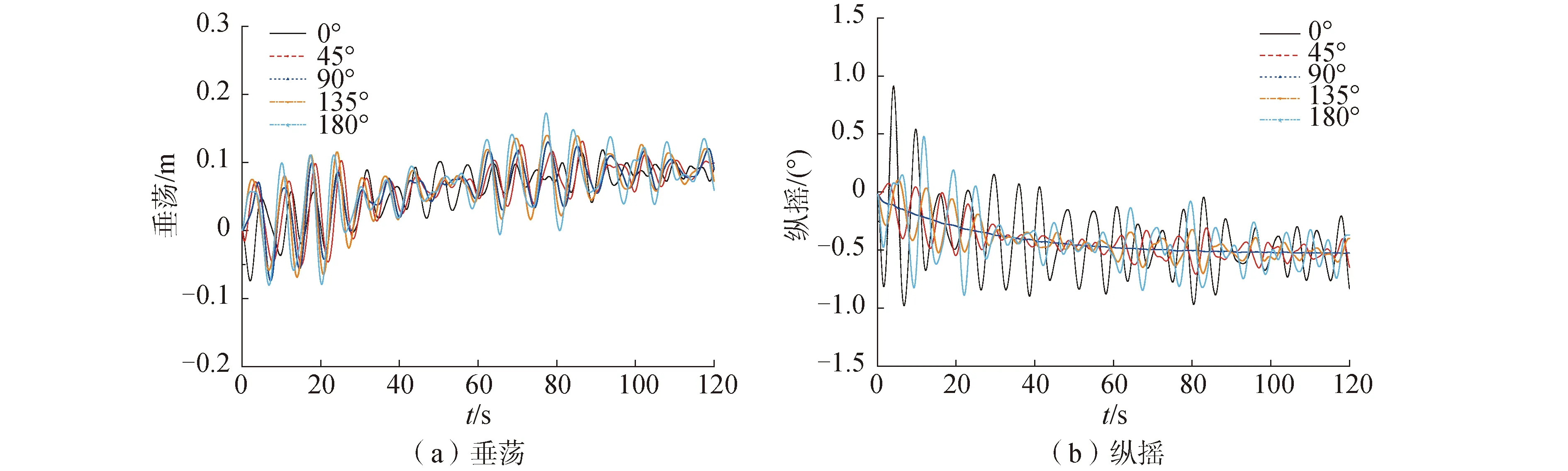
图9 浪向角变化下的运动响应Fig.9 Dynamic responses under different wave direction
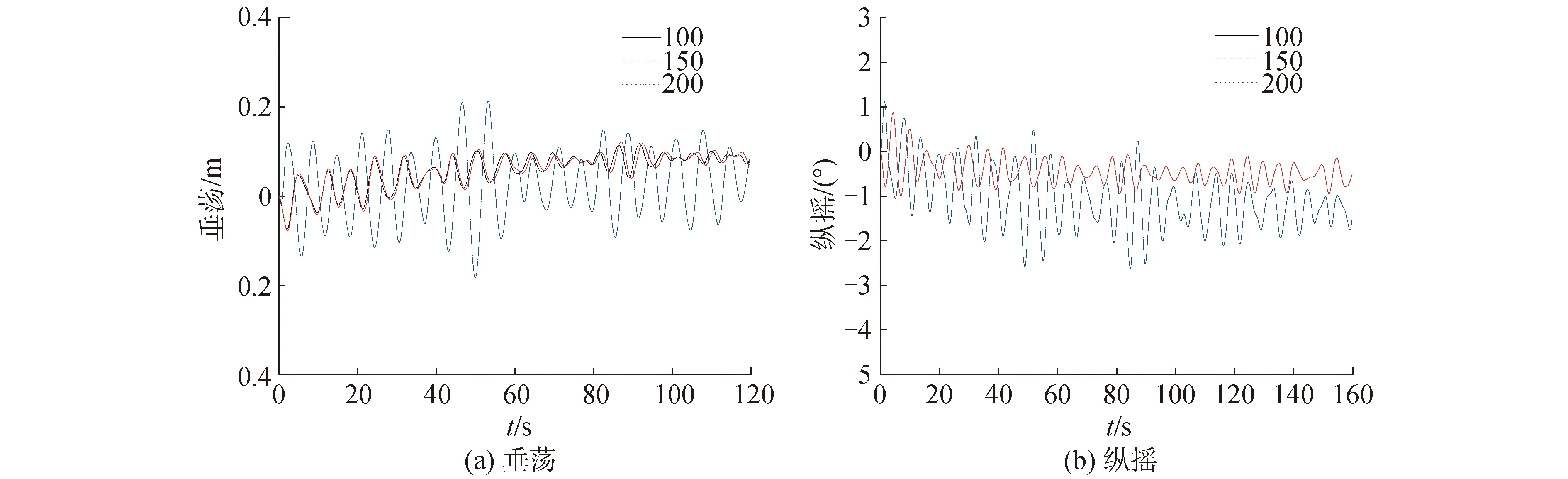
图10 缆绳长度变化下的运动响应Fig.10 Dynamic responses under different length of the towline

图11 缆绳位置变化下的运动响应Fig.11 Dynamic responses under different mooring position
图8~11可以看出,波高对拖航过程的影响十分明显,波高增加,垂荡和纵摇运动的幅值和周期均显著增加。浪向角对垂荡响应的影响程度明显小于纵摇,顶浪拖航的垂荡幅值较大,但其纵摇方向的响应小于顺浪拖航。缆绳长度逐渐增加,改变了拖航系统整体的刚度,结构动力响应出现突然变化,长度过长不利于保持拖航稳性,降低系统的耐波性。系缆点的位置受到结构型深和吃水深度的限制对拖航的运动响应影响极小。
2.2.2 联合海况
联合海况同时考虑了平均风速、波高以及作用方向对拖航运动的影响情况。一体式测风塔的基础比一般的海洋浮式平台尺寸较小,当环境荷载方向垂直于拖航方向时,波高过大会导致无法正常拖航,数值模拟不收敛,因此海况C4调整了该方向的计算波高为2.0 m,即与C2的参数设置一致仅方向垂直,各工况下测风塔结构的动力响应对比结果如图12所示。

图12 联合工况下的运动响应Fig.12 Dynamic responses under joint sea states
图12表示联合工况下测风塔结构的拖缆力(系缆力),垂荡和纵摇运动的变化情况。由于风荷载作用,结构整体的振荡明显强于仅考虑波浪荷载的单因素拖航下响应。相同拖缆力作用下,顺浪拖航的拖缆力及的运动响应的波动在波高较小时的变化稳定,随着波高增大,拖缆力及运动幅值显著增大,在工况C3下,拖缆力的幅值可能会增加至工况C1拖缆力的2~5倍左右。
C3顺浪、C5顶浪拖航时垂荡和纵摇运动的振幅最大,周期较长,其中垂荡的周期在8 s左右,纵摇的周期在9 s左右。C4的荷载作用方向与横荡方向一致,此时运动方向偏离,纵摇运动幅值最小,周期最长约为14 s。相同环境荷载作用下,与顺浪拖航对比,顶浪拖航时缆绳的张力较小,纵摇幅值较小,仅垂荡响应较大。因此综合考虑,在环境海况比较恶劣时选择顶浪拖航的方式有利于保持稳性要求,同时应尽量避免出现偏航。
3 结论
1)通过运动响应传递函数得到一体式测风塔结构在拖航运输过程中的纵荡、垂荡和纵摇3个自由度上的频率响应变化规律。纵荡和垂荡均在低频范围内出现较大的响应幅值,浪向角的影响对纵荡运动在低频范围内差别较明显,垂荡整体影响最小,纵摇的影响相对明显。
2)不同工况下的浮运拖航动力响应分析可知单因素海况中波高影响较大,波高越高,运动响应周期越长,垂荡、纵摇的幅值越大;浪向角对纵摇运动影响较大,顶浪和顺浪的动力响应大于其他浪向角的情况;调节缆绳长度,可以控制拖航稳性。
3)联合海况作用下顺浪拖航的拖缆力和纵摇的响应大于顶浪拖航,垂直于拖航方向的海况作用下,虽运动响应较小,但是横向偏航十分严重,应严格避免。环境海况恶劣时建议选择顶浪拖航的方式,尽量将拖航方向与荷载作用方向保持平行。
猜你喜欢
机电信息(2022年19期)2022-10-15
船舶(2022年4期)2022-08-20
舰船科学技术(2022年10期)2022-06-17
军事护理(2022年4期)2022-05-08
特种结构(2021年5期)2021-11-15
分布式能源(2021年3期)2021-07-31
船舶(2020年4期)2020-08-29
中国船检(2020年1期)2020-03-01
船海工程(2015年4期)2016-01-05
创新时代(2015年10期)2015-11-02