自主式水下机器人推进器弱故障辨识方法
2020-11-13 01:53于大程朱晨光张铭钧
哈尔滨工程大学学报 2020年8期
于大程, 朱晨光, 张铭钧
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨150000)
水下机器人是目前唯一可以在深海工作的装备,在海洋开发中发挥着重要的作用[1]。自主式水下机器人(autonomous underwater vehicle,AUV)无人无缆工作在复杂的海洋环境中,其安全性是AUV研究和应用的重要问题之一,故障诊断是保障其安全性的关键技术[2]。推进器是AUV中负荷最重、使用频率最高的部件,是影响AUV安全性的重要部件[2]。因此,研究推进器故障诊断技术对提高AUV安全性具有重要研究意义和实用价值[3]。AUV推进器故障诊断技术研究受到很多学者关注,但大多研究推进器出力损失较大的故障[4]。推进器出力损失较小的弱故障(出力损失小于10%)多为早期故障,研究推进器弱故障诊断技术可避免更大事故的发生。推进器故障诊断技术流程主要包括故障特征提取和故障程度辨识2部分[5-6],其中弱故障辨识的典型方法有灰色关联分析(grey correlation analysis,GCA)[7]、隐半马尔可夫模型[8]、支持向量域描述[9]等。灰色关联分析方法是AUV推进器故障程度辨识比较典型方法[10]。
本文基于文献[10],重点研究推进器弱故障的程度辨识问题。本文基于该方法进行AUV推进器弱故障的程度辨识时发现,该方法存在:1)不侧重分析不同的故障信号间的变化差异;2)计算关联度时未考虑不同故障信号间的差异性;3)对AUV故障信号关联度处理不当等问题。这些问题导致故障程度辨识误差较大。本文分析了产生问题的原因,根据灰色关联理论,提出了改进方法,通过AUV实验样机水池实验,验证本文改进方法有效性。
1 推进器弱故障辨识时存在的问题
GCA方法是AUV推进器故障辨识比较典型的方法[10-11],本文基于该方法进行推进器故障辨识时发现,推进器故障程度较大时,该方法效果较好,但对故障程度较小的弱故障,该方法存在辨识精度较低的问题。本文基于GCA方法,得到AUV实验样机某待辨识信号(实际故障程度为理论出力的92%)和实际故障程度为理论出力的70%、80%、90%、100%这些参考信号的关联度。待辨识信号与70%、80%、90%、100%参考信号的关联度分别0.703 7、0.765 7、0.841 4、0.802 1。
根据文献[10-12],待辨识信号的故障程度为:
(1)
式中:‖R‖0和‖R‖1为2个最高的关联度,y0和y1为这2个参考信号Y0和Y1的故障程度。
根据上述关联度结果以及故障辨识结果,分析基于灰色关联分析方法进行推进器弱故障辨识时存在的问题为:
1)各不同信号间的关联度差异较小。
出力90%、92%的故障信号间关联度结果0.841 4和出力100%、92%的故障信号间关联度结果0.802 1相差不大,根据灰色关联理论[9],这种关联度结果间差异较小的情况,是不利于出力90%~100%故障信号的弱故障诊断的。
GCA方法不关注不同故障信号间的差异,直接进行归一化处理,导致故障特征矩阵中变动量较小的特征量在故障程度辨识中所占比重被淡化。
2)各信号的关联度计算结果偏低。
出力92%故障的待辨识信号和出力90%的故障信号关联度为0.841 4。理论上,由于90%和92%的故障程度比较接近,出力90%、92%的故障信号间差别应该很小,然关联度的计算结果0.841 4比预期值小,这说明对于本文的弱故障信号,该关联度计算方法还有可改进之处。
不同类型的故障特征向量之间的相关性不强,关联系数对辨识结果没有参考价值。因此,计算关联度时,不同类型故障特征向量间的关联系数会导致不同故障程度的待辨识信号和参考信号的关联度计算结果偏低。
3)处理关联度的方法不合理。
从上面得到的故障辨识结果94.88%来看,这种传统灰色关联理论中加权平均处理关联度的方法对弱故障程度的辨识精度有限(误差为2.88%)。这表明这种处理关联度的方法不准确,应根据信号关联度和故障程度间存在的关联规律寻找更为合适的关联度处理方法。
AUV故障信号作为统计量具有正态分布统计特点,而GCA方法将关联度进行加权平均计算,与故障信号特点不相符,导致辨识误差较大。
2 关联度计算
针对灰色关联分析方法各不同信号间的关联度差异较小的问题以及在计算信号间关联度时未考虑不同故障信号间的差异性问题,本文对关联度计算方法进行改进。
2.1 故障特征增强
针对GCA方法不同信号间的关联度差异较小的问题,本文提出一种基于特征值相对变化量的归一化计算方法。在灰色关联分析中,以信号相对特征值代替绝对特征值的故障特征矩阵相对转化方法。
2.1.1 问题分析
针对灰色关联分析方法各不同信号间的关联度差异较小的问题,本文基于灰色关联理论[10]分析认为,灰色关联分析理论降低了变动范围较小的特征量在故障程度辨识中所占的比重,进而导致各不同参考信号和待辨识信号的关联度差异较小。
通过本文作者研究的实验数据,验证上述原因分析是否正确。AUV各故障程度下速度信号部分特征值如图1所示。
分析图1,故障程度从出力100%故障增加到出力70%故障过程中,信号的各不同特征量变化量差异较大。如KR的最大值为3.950 6,最小值为2.701 1,变化量ΔEKR=1.249 5;波动偏差STD的最大值为4.763 6,最小值为1.865 9,变化量ΔESTD=2.897 7;局部极大能量熵EOLM的最大值为8.658 7,最小值为1.643 2,变化量ΔEEOLM=7.015 5。ΔESTD是ΔEKR的2.32倍,ΔEEOLM是ΔEKR的5.61倍。通过数据分析可以看出,各不同特征量间存在变化量差异较大这一现象。

图1 AUV各故障程度下速度信号部分特征值变化规律Fig.1 The change law of partial fault feature value of speed signal
本文进一步分析发现,GCA方法直接根据故障特征量计算向量关联度,因为ΔEEOLM最大,ΔEKR相对较小,则ΔEEOLM对关联度的计算结果影响最大,而ΔEKR的影响则相对较小。所以KR在最终辨识结果中所占的比重被淡化,进而导致计算出的各不同信号间的关联度差异较小问题。
基于上述分析,为了合理放大类似KR这种变动范围较小的特征量的变化规律,本文提出一种基于特征值相对变化量的归一化计算方法,以解决GCA方法中各不同信号间的关联度差异较小的问题。
2.1.2 计算方法
针对GCA方法各不同信号间的关联度差异较小问题,本文提出一种特征值相对变化量的归一化计算方法。
本文改进方法的主要思路是:由于灰色关联分析中所用的特征值变化范围差异较大,故本文从消除各特征值间的这种变化范围差异出发,以一种归一化的处理方式将所有特征值不同的变化范围转化为相同的变化范围。从而实现合理放大变动范围较小的特征量(如KR)的变化规律的目的。
本文方法与灰色关联分析方法的不同之处在于:灰色关联分析方法直接由提取的信号特征值计算特征向量间的关联度;本文方法用相对特征值代替绝对特征值,放大变动范围较小的特征量的变化范围,统一所有故障特征的变化范围,然后对相对特征值进行关联度计算。
根据本文参考信号的故障程度变化范围,将每项特征量的最大值和最小值作为各自的上下限,对范围内的所有特征量进行相对转化。
本文以特征值峰度系数KR为例,阐述这种由信号特征量得到相对特征量的定义式,其他特征量计算方式同理故不再赘述。
(2)
式中:KR0为未发生故障的信号的峰度系数;KR1为出力70%故障信号的峰度系数;KRx为出力x故障信号的峰度系数。
2.1.3 结果对比
本文基于特征值相对变化量的归一化计算方法,将GCA方法得到的AUV各故障程度下速度信号部分特征值(图1),通过式(2)转换,得到本文方法在AUV各故障程度下速度信号部分相对特征值变化规律如图2所示。
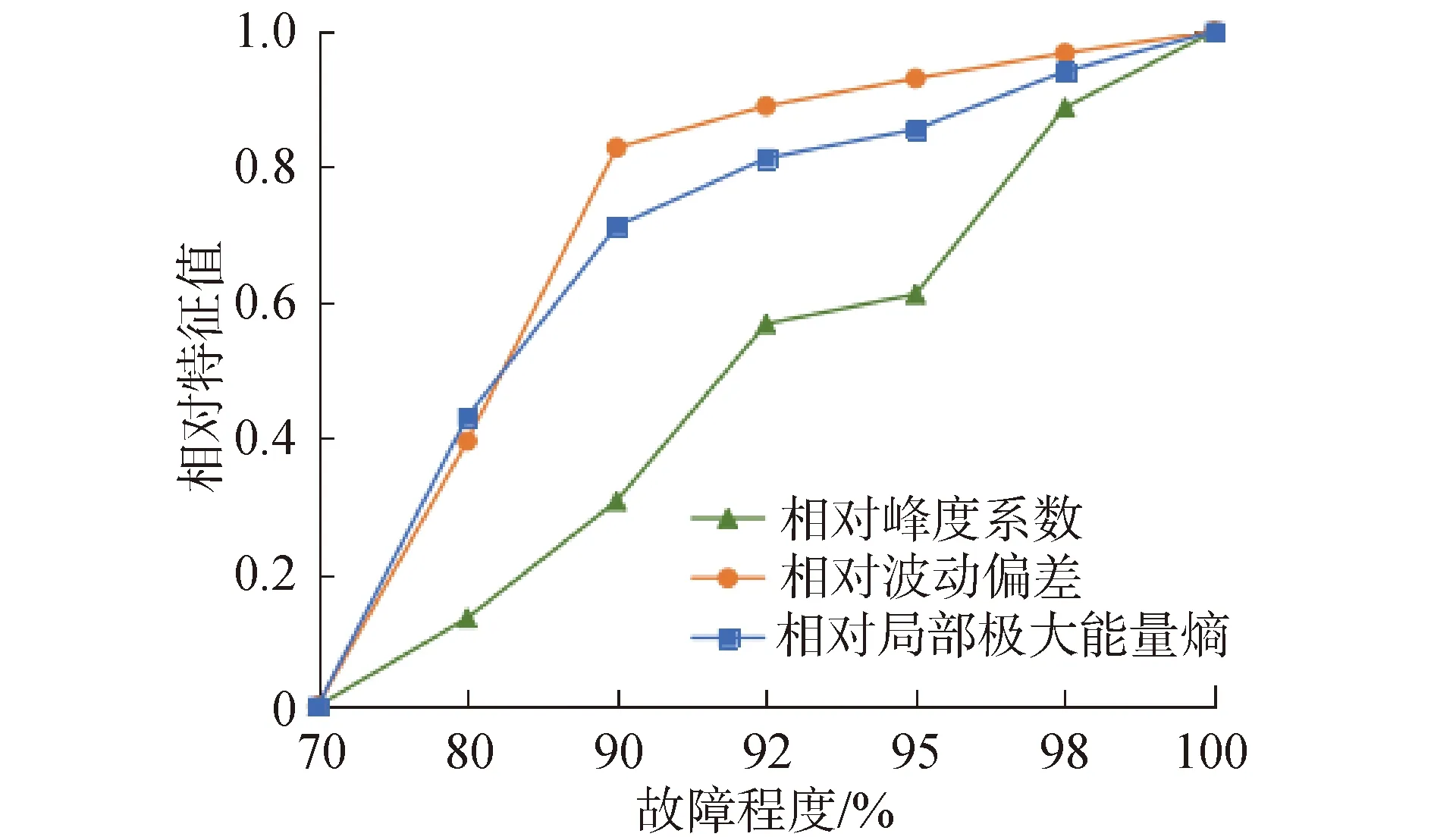
图2 AUV各故障程度下速度信号部分相对特征值变化规律Fig.2 The change law of partial relative fault feature value of speed signal
由图2可看出,所有特征值的变化范围都是(0,1),而且相对特征值能够反映出所有特征值的变化规律。以变化范围最大的特征值ΔEEOLM为基准,ΔESTD相对增大了232%,ΔEKR相对增大了561%。这说明本文所提相对特征量计算方法具有合理放大变动范围较小的特征量(如KR)的变化规律。
为了进一步验证采用相对特征值对各个特征量变化规律的增强效果,将本文方法得到的图2中的特征值的相对转化结果和GCA方法得到的图1中的原始特征值进行对比。
相对特征值能较好地反映出所有特征量的变化规律。例如,变动范围较小的特征量KR和变动范围较大的特征量EOLM转化为相对特征值之后,变化范围都变成(0,1);KR的变化规律有了大幅增强,EOLM的变化规律也有小幅增强。这证明了本文所提相对特征量计算方法,在各信号特征量的归一化处理中,对变动范围较小的特征量的变化规律具有较好的增强效果。实验结果验证了本文方法的有效性。
2.2 关联度计算
针对GCA方法在计算信号间关联度时未考虑不同故障信号间的差异性问题,本文提出一种基于信号类型分类计算参考信号和待辨识故障信号的关联度方法,以增强故障信号间的关联效果。
2.2.1 问题分析
传统的GCA方法计算关联度时未考虑不同类型的故障信号之间的差异性,导致不同故障程度的参考信号和待辨识信号的关联度计算结果偏低,本小节对此问题进行原因分析。
已知故障程度的信号组成的参考故障特征矩阵Y和未知故障程度的信号组成的待辨识故障特征矩阵X为[11]:
(3)
传统的GCA方法计算所有的xi(i)和yj(i)间的向量关联度,然后将所有的向量关联度的平均数作为参考信号X和待辨识信号Y的整体关联度,具体计算见文献[10-12]。
本文分析GCA方法计算关联度时存在问题的原因:X和Y分别表示参考信号和待辨识信号,二者分别表示2种不同故障程度的信号的特征矩阵;xi(i)和yj(i)二者分别表示2种故障程度下的故障矩阵中的不同类型的故障特征向量,其中下角标i和j表示信号类型。当信号故障程度发生改变时,不同类型信号的同一个特征量的变化规律是不同的。但是传统的GCA方法计算的是X和Y2个特征矩阵的整体关联度,并未考虑到xi(i)和yj(i)2种信号的类型差异。即使故障程度相同,但由于xi(i)和yj(i)2种信号的类型不一样,也会导致这2种信号相关性较低,并且在实验研究中发现,相比于这2种信号由于自身类型差异所产生的较低关联度结果,不同程度故障对这两者的关联度计算结果的影响较小。因此,在利用GCA计算关联度之前需要考虑到信号自身的类型差异,否则无法直接说明是由于不同程度故障引发的信号间关联度低,也就是在进行故障程度辨识时,需基于同类型信号(xi(i)和yi(i))间的关联度结果。
2.2.2 计算方法
针对GCA方法计算关联度时未考虑不同类型的故障信号之间的差异性问题,根据2.2.1节的分析,本文提出一种基于信号类型分类计算参考信号和待辨识故障信号的关联度方法。
本文方法的基本思路为:xi和yi是不同故障程度下的同一类型的故障特征信号,它们虽然互相独立,但是2个信号之间具有相似性。本文根据xi和yi之间的关联度rii进行故障辨识。
本文方法与GCA方法的不同之处:与传统GCA方法在计算参考信号和待辨识信号的整体关联度时,先计算任意2个故障特征向量间的关联度,然后根据所有的关联度计算参考信号和待辨识信号的整体关联度的技术路线不同,本文方法先按照信号的类型对各故障信号分类,然后只计算同类型特征向量间的关联度,再据此计算参考信号和待辨识信号的整体关联度。

R=[r11,r22,…,rii]
(4)
式中rii表示xi和yi之间的关联度。
然后根据这个按信号类型分类计算特征向量关联度得到的一维向量R,计算一维向量R中各元素的平均值,该平均值就是最终得到的关联度结果。
2.2.3 结果对比
为了验证本文基于故障信号类型进行分类关联计算故障特征向量关联度方法的效果,分别采用本文方法和GCA方法计算实验平台AUV运行过程的各故障信号的关联度,并将结果进行对比。
根据本文改进的GCA方法和传统GCA方法所获得的最终关联度结果如表1所示,其中,‖Rx‖i,j是本文改进GCA方法的结果;‖R0‖i,j是传统GCA方法的结果。
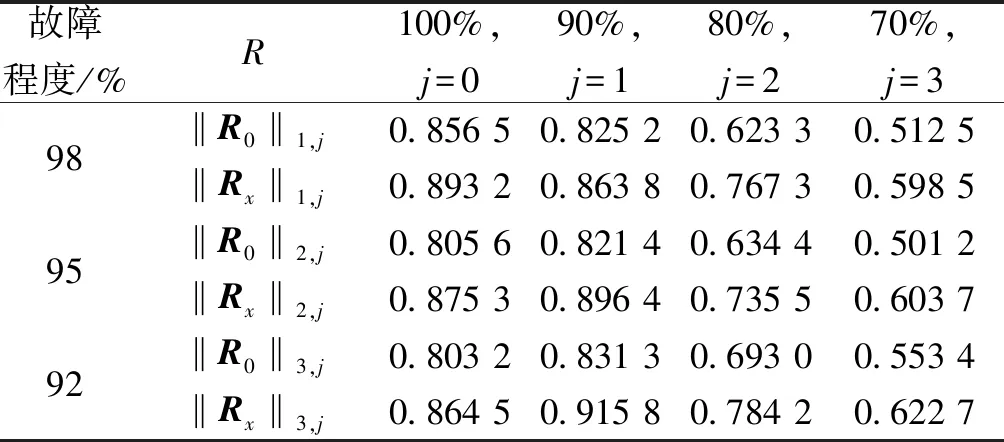
表1 本文方法及传统GCA方法的关联度结果
分析表1,对于任意的i∈(1,2,3),j∈(1,2,3),都有‖Rx‖i,j>‖R0‖i,j成立。在推进器出现98%故障时,基于本文方法,该故障与100%故障情况的关联度最大,为0.893 2,相比于传统方法所得的关联度结果0.856 5而言,本文方法所得的关联度提高了4.3%。在推进器出现95%故障时,基于本文方法,该故障与90%故障情况的关联度最大,为0.896 4,相比于传统方法所得的关联度结果0.821 4,本文方法所得的关联度提高了9.1%。在推进器出现92%故障时,基于本文方法,该故障与90%故障情况的关联度最大,为0.915 8,相比于传统方法所得的关联度结果0.831 3,本文方法所得的关联度提高了10.2%。综上,实验结果验证了本文方法的有效性。
3 故障程度辨识
GCA方法的辨识结果与实际故障程度仍有一定的偏差。为了增加对AUV未知故障信号故障程度辨识的准确性,本文根据AUV故障信号的特点,提出一种基于正态分布模型的故障程度辨识方法。
3.1 问题分析
前文已说明,GCA方法在得到参考信号和待辨识故障信号的关联度后,按照关联度的大小对参考信号的故障程度进行加权平均处理,从而得到信号的故障辨识结果,但往往会导致辨识误差较大。本文在计算故障特征值时,将AUV的各故障信号视为有限时间内的统计量,因此,这些故障特征值应该符合一定的统计学规律。经过研究发现AUV故障信号的正态分布统计特点。受样本大小限制,无法对所有推进器故障建立数据库,本文是故障程度每隔10%建立一个参考信号,在对未在数据库中的推进器故障进行辨识时,根据常规的GCA所辨识的结果只能落在样本数据库的关联度最大的参考信号中,也就会存在一个辨识误差,虽然通过加权平均处理能有所改善,但它忽略了作为统计量的AUV故障信号的正态分布统计特点,进而导致辨识误差仍较大。
基于上述分析,AUV的状态量和控制量在一段时间内的统计值都应该满足统计学上的正态分布规律:各类信号统计值都在该类信号的期望值处集中分布,越远离期望值,信号点越少[13]。针对GCA辨识出故障程度和信号的实际故障程度仍有一定的偏差的问题,本文提出一种基于正态分布处理关联度结果的方法。
3.2 计算方法
针对GCA方法处理关联度时存在辨识出故障程度和信号的实际故障程度仍有一定的偏差的问题,根据3.1节的分析,本文提出一种基于正态分布处理关联度结果的方法。本文根据AUV故障信号的正态分布规律,即各类信号统计值都在该类信号的期望值处集中分布,越远离期望值,信号点越少[13],研究推进器故障辨识问题。
与传统GCA方法按照关联度的大小对参考信号的故障程度进行加权平均处理,从而得到待辨识信号的故障程度的技术路线不同,本文方法基于正态分布模型表达不同故障程度信号的关联度分布,从而根据参考信号的关联度正态分布模型计算待辨识信号的故障程度。
本文以出力90%故障信号特征值分布为例详细阐述本文方法的具体实现过程。
1)绘制出力90%故障的信号特征值的正态分布。
根据正态分布一般图像[14]以及在出力90%故障下信号有一个稳定的集中“期望值”的特点,绘制出力90%故障信号特征值分布,如图3所示。在图3中,理论上出力90%故障信号的特征值的统计结果应该位于“期望值”处。如果实际统计的特征值离期望值越远,说明该信号的实际故障程度离出力90%这一数值越远。

图3 出力90%故障的信号特征值的正态分布Fig.3 Normal distribution of 90% failure output
2)基于关联度大小得到与故障辨识相关的距离。
将图4中的信号特征值变换为信号与出力90%故障信号之间的关联度,则图4就变为出力90%故障信号的关联度分布曲线,利用信号关联度的数值大小,获得待辨识信号与参考信号的故障程度之间的距离。理论上2个出力90%故障信号间的关联度为100%,如果待辨识信号和出力90%故障信号关联度越大,就表明该信号的故障程度为出力90%故障的可能性越大,即该信号与出力90%故障信号的故障程度之间的距离越小。假设现在有一待辨识信号,与出力90%故障信号间关联度为‖R‖1,如图3中标识的那样,该信号的关联度和出力90%故障信号关联分布曲线有2个交点,意味着该信号的实际出力故障程度有2个不确定量,可能是出力x90∈(90%,100%),也可能是出力x80∈(80%,90%)。
3)根据与另一个参考信号的相关度确定故障辨识结果的区间。
为了确定未知故障程度信号是大于90%还是小于90%,即故障程度是落在90%的左边还是右边,需引入另一个已知故障程度的参考信号,根据未知故障程度信号与引入的参考信号的距离,判断位置信号的故障程度范围。参考本文最初设置的参考信号的故障程度分别为出力70%、80%、90%、100%,当一个待辨识信号作为比较信号分别和这4个参考信号进行灰色关联分析后,可得到关联度最高的2个参考信号。例如,以出力100%和90%故障信号为例进行说明:如果待辨识信号与出力100%和90%的故障信号之间的关联度为最大值和次大值,则可以确定待辨识信号的故障程度就位于100%和90%这2个参考信号的故障程度之间,具体如图4所示。
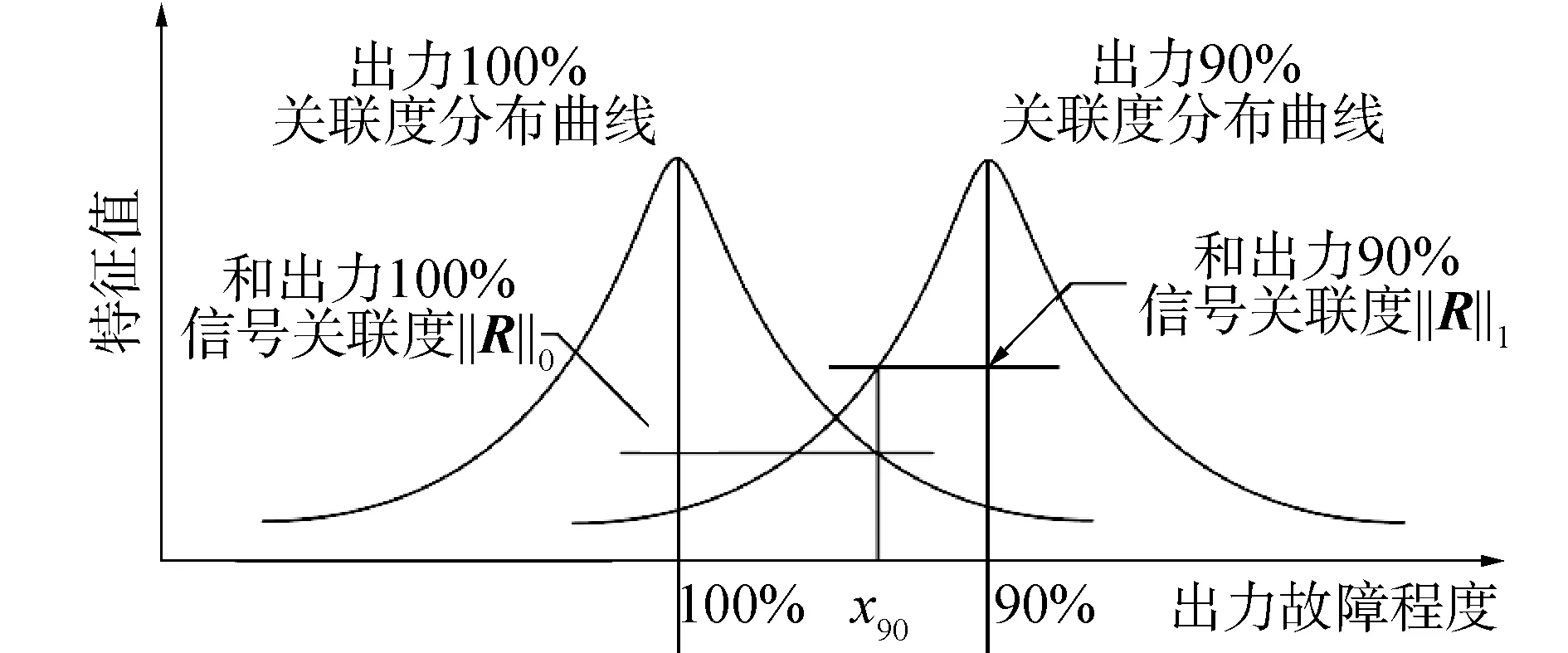
图4 出力90%和出力100%故障信号的关联度分布曲线Fig.4 Correlation degree of 90% and 100% failure output
4)确定最终辨识结果。
由图4,当确定了各故障程度的关联度分布曲线的正态分布模型后,根据出力x90信号和出力100%信号关联度‖R‖0,可得到出力9x%在关联度分布曲线上离出力100%分布曲线中心的距离d0,同样根据‖R‖1,也可得到出力x90离出力90%分布曲线中心的距离d1。则根据d0和d1,给出本文求取x90的计算方法,即最终辨识结果为:
(5)
式中:d1为x90离出力90%正态分布中心的距离;d0为x90离出力100%正态分布中心的距离。
3.3 结果对比
为了验证本文所提基于正态分布模型方法处理关联度方法在进行推进器故障辨识方面的有效性,分别采用本文方法和传统GCA方法求取故障程度辨识结果,并将结果与实际AUV故障信号的故障程度进行对比。
根据第2节中表3给出的AUV各故障程度下速度信号部分相对特征值,计算本文方法和传统GCA方法的推进器故障辨识结果,如表2所示。
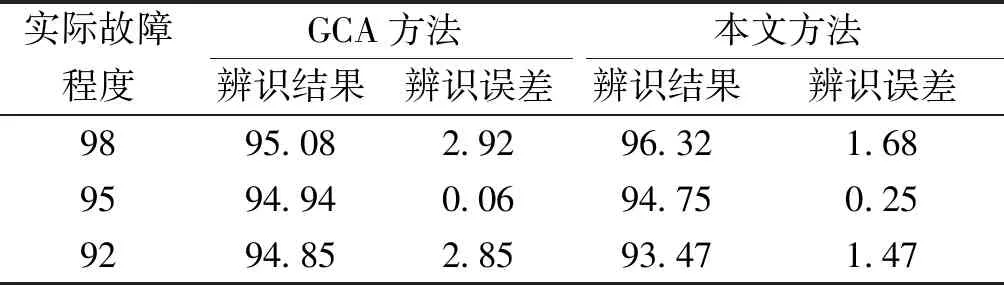
表2 AUV各信号故障程度辨识结果Table 2 AUV signal fault identification results %
分析表2的结果。从表2中可看出:传统GCA方法在98%、95%、92%故障信号的辨识结果分别为95.08%,94.94%,94.85%,均向故障程度区间的中点(95%)处集中,且辨识误差分别为2.92%,0.06%,2.85%;而本文方法在98%、95%、92%故障信号的辨识结果分别为96.32%,94.75%,93.47%,辨识误差分别为1.68%、0.25%、1.47%。本文方法在98%、92%故障信号下的辨识误差相比于传统GCA方法分别降低了42.5%、48.4%,但是本文方法在95%故障信号下的辨识结果要差于传统GCA方法,这主要是由于传统GCA方法辨识结果在95%处集中导致。因此,实验结果验证了本文方法在对未在故障库中的推进器故障辨识方面的有效性。
4 结论
1)本文提出的基于特征值相对变化量的归一化计算方法有效增强了变化范围较小的特征量的变化规律,解决了传统GCA方法直接进行归一化处理导致故障特征矩阵中变动量较小的特征量在故障程度辨识中所占比重被淡化的问题。
2)本文提出的基于故障信号类型进行分类关联计算故障特征向量关联度的方法有效增强了推进器弱故障辨识中故障信号之间的关联效果,解决了传统GCA方法在计算关联度时未考虑不同类型的故障信号之间的差异,导致不同故障程度的参考信号和待辨识信号的关联度计算结果偏低的问题。
3)本文提出的基于正态分布函数处理不同故障信号间关联度的方法有效增强了对未在故障库中的推进器故障的辨识效果,解决了传统GCA方法将待辨识信号和各参考信号的关联度进行加权平均计算,导致辨识误差较大的问题。
本文针对不同故障程度的各类故障信号进行故障辨识时,未考虑各类故障信号对辨识结果的影响程度可能不一样。后续的研究工作可以针对解决这种不同类型信号在相同故障程度变化下关联度不同的问题展开。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
网络安全与数据管理(2022年3期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
当代陕西(2018年12期)2018-08-04
课程教育研究·新教师教学(2016年18期)2017-04-12
科技创新导报(2016年31期)2017-03-30
杭州(2016年1期)2016-08-15
风能(2016年3期)2016-07-05
汽车零部件(2014年2期)2014-03-11