六自由度并联机构模态空间解耦控制
2020-11-13 01:53代小林宋世杰宫大为
哈尔滨工程大学学报 2020年8期
代小林, 宋世杰, 宫大为
(1. 电子科技大学 机械与电气工程学院,四川 成都 611731;2. 电子科技大学 机器人中心,四川 成都 611731)
六自由度并联机构具有刚度大、承载力强、动态响应性能好等优点,常用于飞行器模拟、六维力传感器及医疗辅助装置中[1-3]。六自由度并联机构是一个多输入多输出系统,各支腿通道之间存在强时变耦合,影响了该机构的控制精度及应用推广[4-5]。针对并联机构控制中存在的耦合问题,学者取得了一些研究成果,段宝岩等[6]设计了一种交互式比例-积分-微分监督控制器,该方法通过引入目标跟踪预测算法实现了解耦;Niu[7]针对六自由并联机构进行了模态前馈力解耦控制研究;王立平等[8]对并联机构的惯量耦合特性进行了研究;姜洪州等[9]以Stewart平台为研究对象,设计了一种模态动压反馈解耦控制策略;沈刚等[10]提出了一种基于逆模型前馈补偿的解耦控制策略,该方法通过将传递函数矩阵对角化实现了解耦;Gizatullin等[11]提出了一种自适应解耦控制方法,该方法将耦合力视为干扰力进行补偿来降低各自由度之间的耦合;Plummer等[12]针对飞行模拟器的控制提出了模态解耦控制策略;Lian等[13]设计了一种自组织模糊径向基函数神经网络控制器对耦合进行补偿。
本文以Stewart并联机构为对象,建立Stewart并联机构关节空间下的动力学方程和振动模型,推导其模态解耦矩阵并分析各自由度间的耦合特性,基于模态空间设计了计算力矩控制器并进行了仿真研究。
1 动力学建模及模态分析
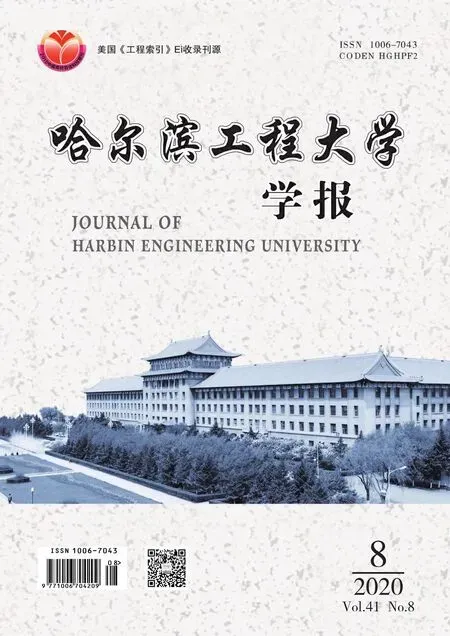
本文所研究的六自由度并联机构为Stewart型并联机构,简图如图1所示。下平台一般固连在地面上,又称作静平台;上平台一般用作运动模拟,又称作动平台;动、静平台之间有6条驱动支腿,驱动支腿的2端分别与动、静平台铰接,连接处分别称作上、下铰点;坐标系A和坐标系B分别为系统的动、静坐标系,其坐标原点分别为上、下铰点圆的中心,各坐标轴的方向如图1所示。
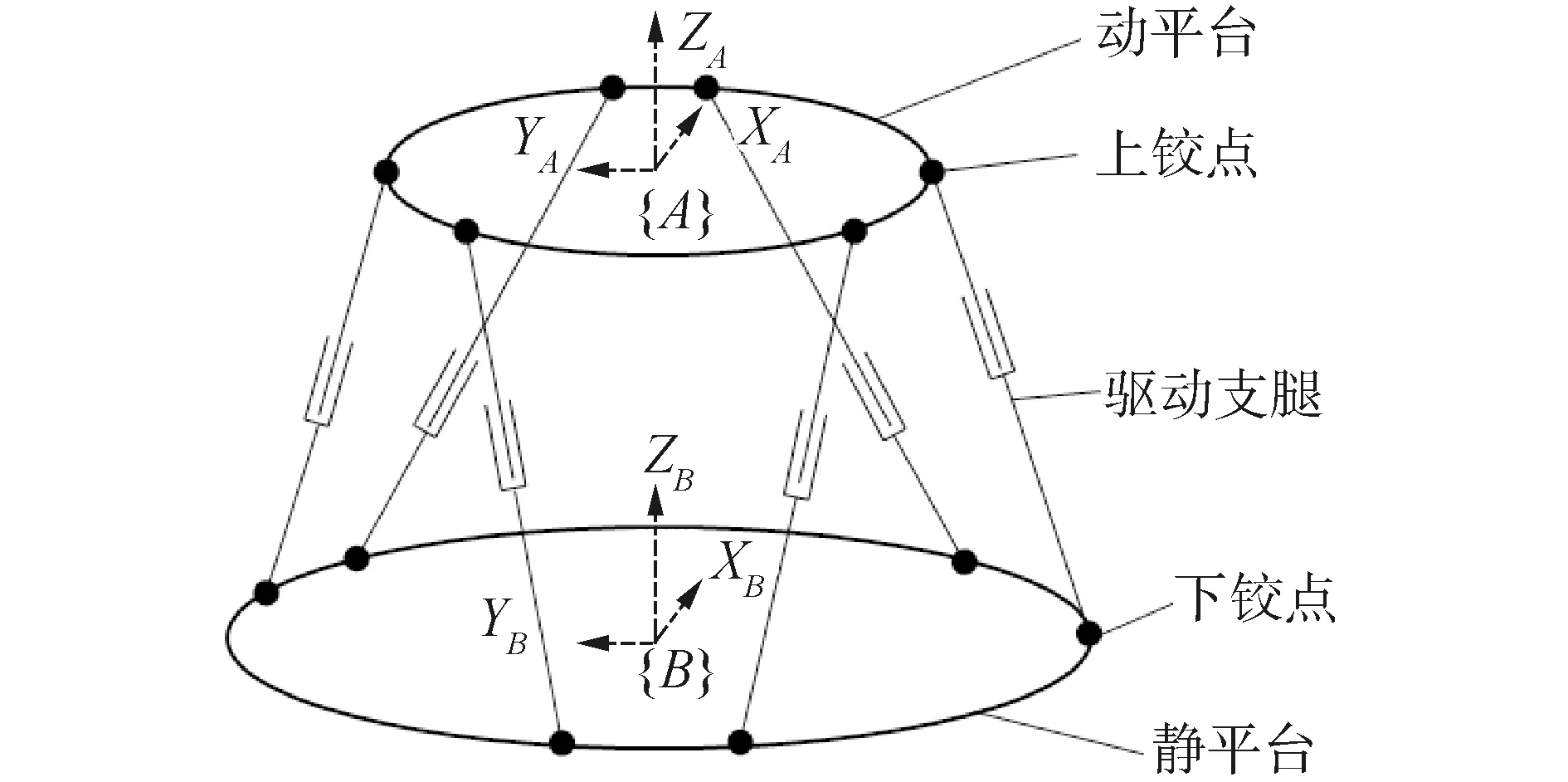
图1 Stewart并联机构简图Fig.1 Stewart parallel mechanism structure
1.1 动力学分析
对Stewart并联机构进行动力学的分析,利用牛顿—欧拉法建立并联机构自由度空间下的动力学方程:
(1)

在式(1)的基础上可以推导出Stewart并联机构的关节空间动力学方程:
(2)
式中:Ml(l)为关节空间质量阵:
Ml(l)=J-1TM0(q)J-1
(3)

(4)
Gl=J-1TGq
(5)
其中,科氏力/向心力项一般较小忽略不计,因此系统关节空间下的自由度方程可以简化为:
(6)
1.2 模态分析
Stewart并联机构可以等效为一个六自由度振动系统,各个支腿可以等效为线性弹簧,弹簧的2端分别连接系统的动、静平台,该振动系统的示意图如图2所示。
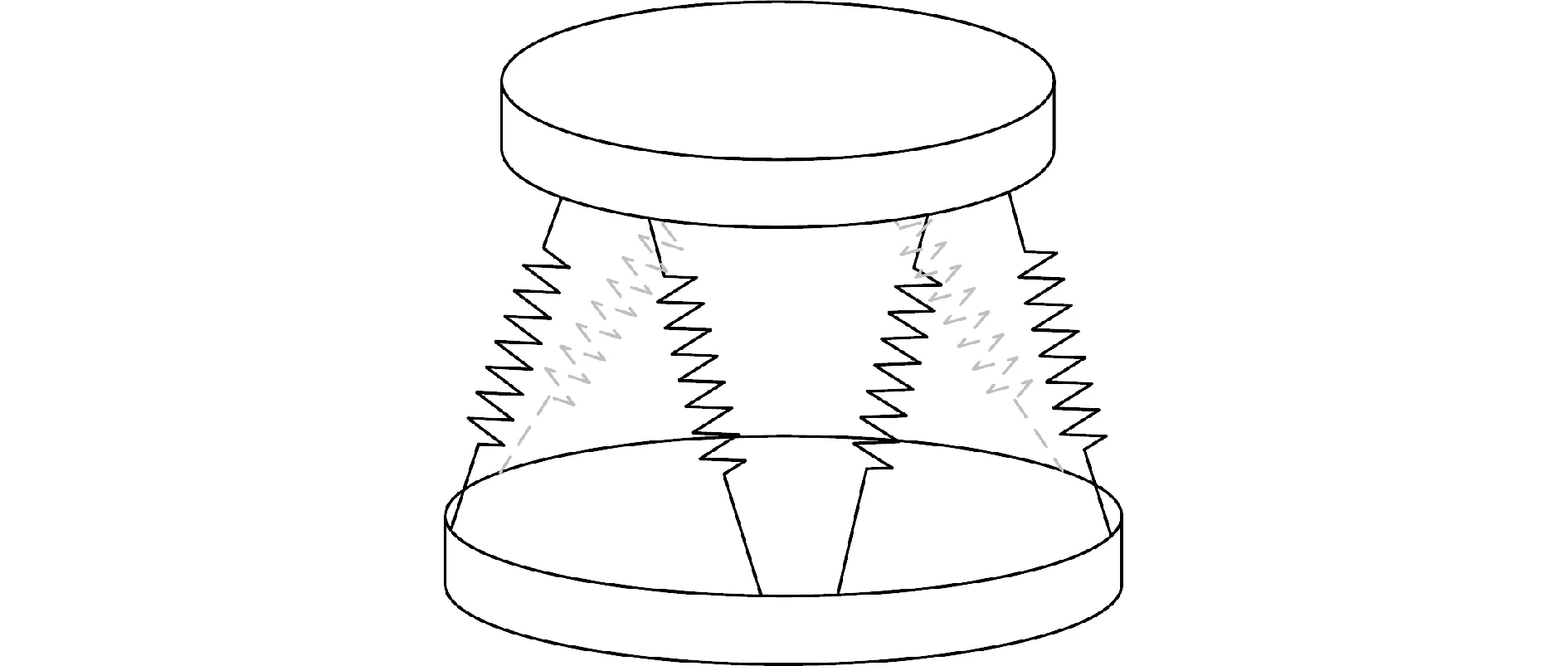
图2 Stewart并联机构振动模型Fig.2 Stewart parallel mechanism vibration model
可以采用模态理论对其进行特征分析,求出系统模态参数,包括系统的模态频率、模态振型等。
忽略式(2)中的重力、科氏力和离心力,可得系统外部激励下的响应方程[14]:
(7)
将每个支腿等效为弹簧系统,则有:
f=-Kll
(8)
式中:Kl=diag(k1,k2,…,ki,…,k6)为关节空间刚度阵,ki是第i条支腿的刚度,各个支腿的刚度近似相等,即ki=kh。
根据式(7)和式(8)得到Stewart并联机构关节空间中的无阻尼自由振动方程:
(9)
式中:关节空间质量阵Ml对称正定矩阵;刚度矩阵Kl为对角矩阵,则矩阵ML-1K为对称正定,对其进行特征值分解:
(10)

根据模态向量的正交性,可以对系统的振动方程进行模态变换,给式(9)的两端同时左乘UT,可以得到系统模态空间下的振动方程:
(11)

由式(11)可知,模态空间下的Stewart并联机构振动方程各模态自由度之间相互独立。因此在模态空间下,系统可以等效为6个独立的单自由度振动系统,每个模态自由度的振动方程为:
(12)

2 模态空间计算力矩控制器设计
计算力矩控制方法(computed torque control,CTC),又称为逆动力学法,是机器人领域中广泛应用的基于模型的一种控制方法。对于并联机构,计算力矩控制通常在各支腿上采用类似于比例-微分控制的控制策略,并引入非线性补偿项对重力和科氏力进行实时补偿[15]。
2.1 关节空间计算力矩控制系统耦合特性分析
Stewart并联机构的关节空间的计算力矩控制律为[16]:
(13)

对式(13)进行拉氏变换有:
(14)
由于关节空间的固有特性,质量矩阵Ml(l)为非对角矩阵或非对角占优矩阵,即使反馈增益矩阵Kp和Kv为对角矩阵,计算力矩控制系统依然为一个各控制通道之间相互耦合的多输入多输出系统,反馈增益矩阵的对角线元素值的改变,都会对其他控制通道产生影响。因此,传统的关节空间计算力矩控制器的参数难以整定,控制器的性能也难以提高。
关节空间计算力矩的控制器的系统误差方程为:
(15)
由式(15)可知,不同的Kv和Kp的值代表着不同性能的闭环控制系统,系统误差e的收敛性与收敛速度是由反馈增益矩阵Kv和Kp决定的。而反馈增益矩阵Kv和Kp均为6×6的矩阵,因此系统需要调节的参数个数为72个。
因此,关节空间计算力矩控制器存在以下2个缺陷:1)系统为一个各控制通道相互耦合的多输入多输出系统;2)控制器中需要调节的参数过多。这2个缺陷使得关节空间计算力矩控制器的参数难以整定,控制器性能的提升受到限制。
2.2 模态空间计算力矩控制方法
为了消除各控制回路之间的相互影响,将模态理论引入到计算力矩控制方法中,达到降低系统的控制难度和提高系统控制性能的目的。
根据式(10)和式(14)将关节空间下的系统输入方程转换到模态空间下,实现坐标系的变换,模态空间计算力矩的控制律为:
(16)

对式(16)进行拉氏变换有:
(17)

(18)
由式(18)可知,模态空间计算力矩控制器可以等效为6个相互独立的子控制器,各个子控制器独立控制一个模态通道。系统各控制通道之间相互独立,且各控制通道的参数可以独立调节。
模态空间下的计算力矩控制方法的控制框图如图3所示。

图3 模态空间计算力矩控制Fig.3 Schematic diagram of computed torque control method in model space
3 仿真结果对比与分析
为验证设计模态空间计算力矩控制器各控制通道的独立性和对运动耦合现象的抑制作用。在Matlab/Simulink中搭建了仿真系统,其中机械本体采用Simulink/Multibody工具进行搭建,搭建效果如图4所示。

图4 Stewart并联机构Simulink/Multibody模型Fig.4 Simulink/Multibody model of Stewart parallel mechanism
图5是在Matlab/Simulink中搭建的模态计算力矩控制方案仿真系统,模块1为信号发生器;模块2为运动学计算模块;模块3为模态计算模块,主要功能是计算模态质量矩阵和模态解耦矩阵;模块4为模态变换模块,主要为模态变换矩阵的计算并将关节信号转换为模态信号;模块5为模态计算力矩控制器;模块6为逆模态变换模块,主要功能是将模态信号转换为关节信号;模块7为Stewart并联机构的机械模型。

图5 模态空间计算力矩控制系统Simulink模型Fig.5 Simulink model of modal space computed torque control system
3.1 控制通道间独立性对比分析
关节空间计算力矩控制系统的6个控制通道为6个驱动支腿,各支腿的数学模型均相同。由本文分析可知,关节空间计算力矩控制系统是一个多输入多输出系统,其各控制通道之间相互影响,很难进行参数整定。本文首先对关节空间计算力矩控制系统控制通道间的独立性进行仿真分析,为验证各控制通道之间的关系,设置了2组控制参数,参数1和参数2。参数2对比参数1仅修改了第2控制通道的控制参数,参数1第2控制通道上的参数为参数2第2控制通道参数的100倍;然后观察参数2下的第1以及第3至第6控制通道响应是否和参数1下的第1以及第3至第6控制通道响应的响应是否相同,若这5个通道的响应未发生改变,则说明各控制通道之间相互独立。对关节空间计算力矩控制系统的沿X轴平移自由度输入幅值为0.02 m,频率为2 HZ的正弦激励,观察参数1、2作用下各控制通道的响应曲线变化。
图6(a)为关节空间计算力矩控制系统控制通道在参数1、2下的响应曲线。图6(a)中,系统给定到各支腿上的目标值信号是自由度空间控制信号经过运动学反解计算得出的。由图1可知,当第2控制通道的控制参数改变,第2控制通道的响应会发生较大变化。对其余5个通道的仿真结果进行分析,结果表明当第2控制通道的控制参数发生改变时,其余5个通道的响应均会发生改变。本文以第1控制通道为例来说明其余5个控制通道的响应变化。图6(b)为关节空间计算力矩控制系统第1控制通道在参数1、2下的响应曲线。由图可知,第2控制通道控制参数的改变会对第1控制通道产生影响。由此可见,关节空间下计算力矩控制系统是多输入多输出系统,因此该控制策略很难找到合适的控制参数来使整体系统获得较好的控制性能。
图6 关节空间CTC系统响应Fig.6 Joint space CTC system response
本文提出的模态空间计算力矩控制器,可以实现各控制通道间的独立控制,使得各控制通道的控制参数可以独立的进行参数整定。对模态空间计算力矩控制系统各控制通道之间的独立性进行仿真分析,参数1、2之间的倍数关系以及系统输入的信号均与关节空间计算力矩控制系统的相同。对于模态空间控制系统,其6个控制通道为6个模态自由度,不同的模态自由度具有不同的模态频率、模态质量以及模态刚度,因此各控制通道的数学模型是不同的。虽然各控制通道的数学模型不同,但是各控制通道之间可以保持独立关系。
图7(a)为模态空间计算力矩控制系统第2控制通道在参数1、2下的响应曲线。当第2控制通道的控制参数改变,第2控制通道的响应会发生较大变化。对其余5个通道的仿真结果进行分析,结果表明当第2控制通道的控制参数发生改变时,其余5个通道的响应均不会发生改变。同样以第1控制通道为例来说明其余5个控制通道的响应变化。图7(b)为模态空间计算力矩控制系统第1控制通道在参数1、2下的响应曲线。由图可见,仅调节第2通道的控制参数,并不会对第1通道的响应产生影响。由此可见,模态空间下的计算力矩控制系统是单输入单输出系统,控制参数的整定和控制器性能提高变得较为容易。
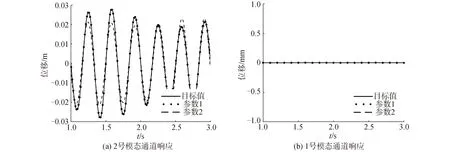
图7 模态空间CTC系统响应Fig.7 Modal space CTC system response
3.2 运动耦合抑制能力对比分析
为测试模态空间下计算力矩控制策略对运动耦合现象的抑制作用,对系统进行了运动耦合仿真分析。由于Stewart并联机构的旋转自由度和平移自由度之间存在较强的耦合,且主要集中在在沿X轴平移自由度和绕Y轴的旋转自由度以及沿Y轴平移和绕X轴旋转自由度。因此,主要对这2种情况下的模态CTC和传统CTC进行对比分析。
对仿真系统的沿X轴的平移自由度输入幅值为0.02 m,频率为2 HZ的正弦激励,其他自由度设定为0。RY自由度的耦合对比如图8所示。
对仿真系统的沿Y轴的平移自由度同时输入幅值为0.02 m,频率为2 HZ的正弦激励,其他自由度设定为0。RX自由度的耦合对比如图9所示。
从图8可以看出,在传统CTC控制下,系统在沿X轴平移自由度的正弦激励下,会在RY自由度方向的产生耦合,严重影响了控制精度。而在模态CTC控制策略下,给予系统同样的正弦激励,耦合明显降低,且耦合幅值下至解耦前的18.29%;系统在沿Y轴平移自由度的正弦激励下,在模态CTC控制策略下,RX自由度耦合幅值下降至解耦前的7.55%。
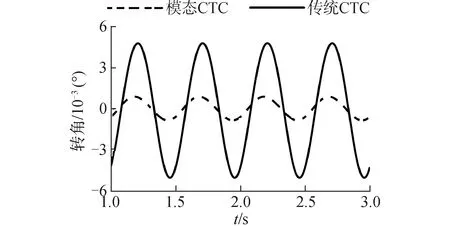
图8 沿X轴平移运动时RY自由度耦合转角比较Fig.8 Coupling comparison of RY degree of freedom when translating along the X-axis
对仿真系统的X轴的平移自由度和沿Y轴的平移自由度同时输入幅值分别为0.02 m和0.03 m,频率分别为2 HZ和3 HZ的正弦激励,其他4个自由度给定为常值0信号。RX、RY自由度的耦合对比分别如图10、11所示。可以看出,系统在沿X、Y轴平移自由度的正弦激励下,对RX、RY自由度的耦合较为明显。在模态CTC控制策略下,RX自由度耦合幅值下降至解耦前的9.42%,RY自由度耦合幅值下降至解耦前的19.22%。
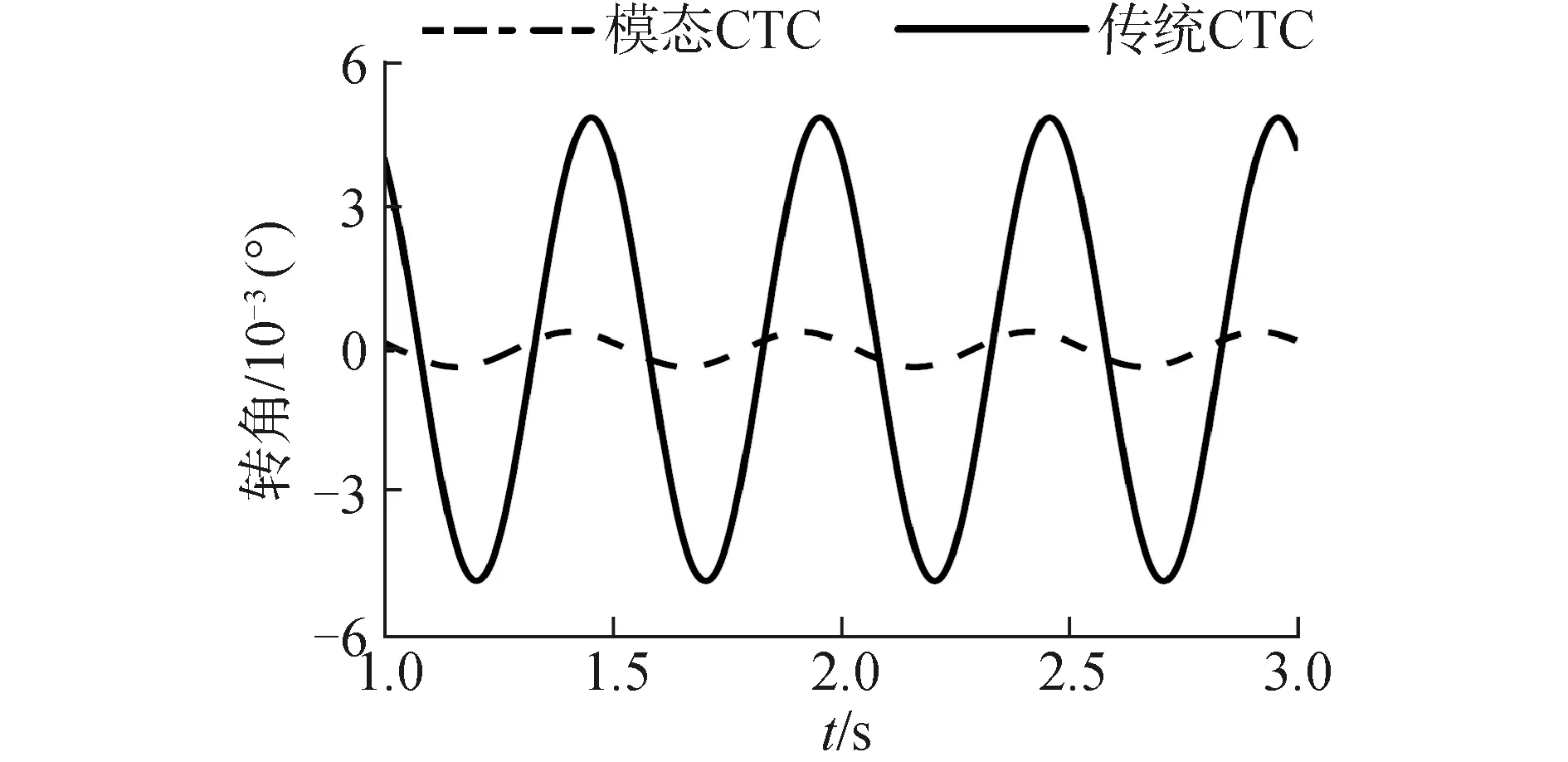
图9 沿Y轴平移运动时RX自由度耦合转角比较Fig.9 Coupling comparison of RX degree of freedom when translating along the Y-axis
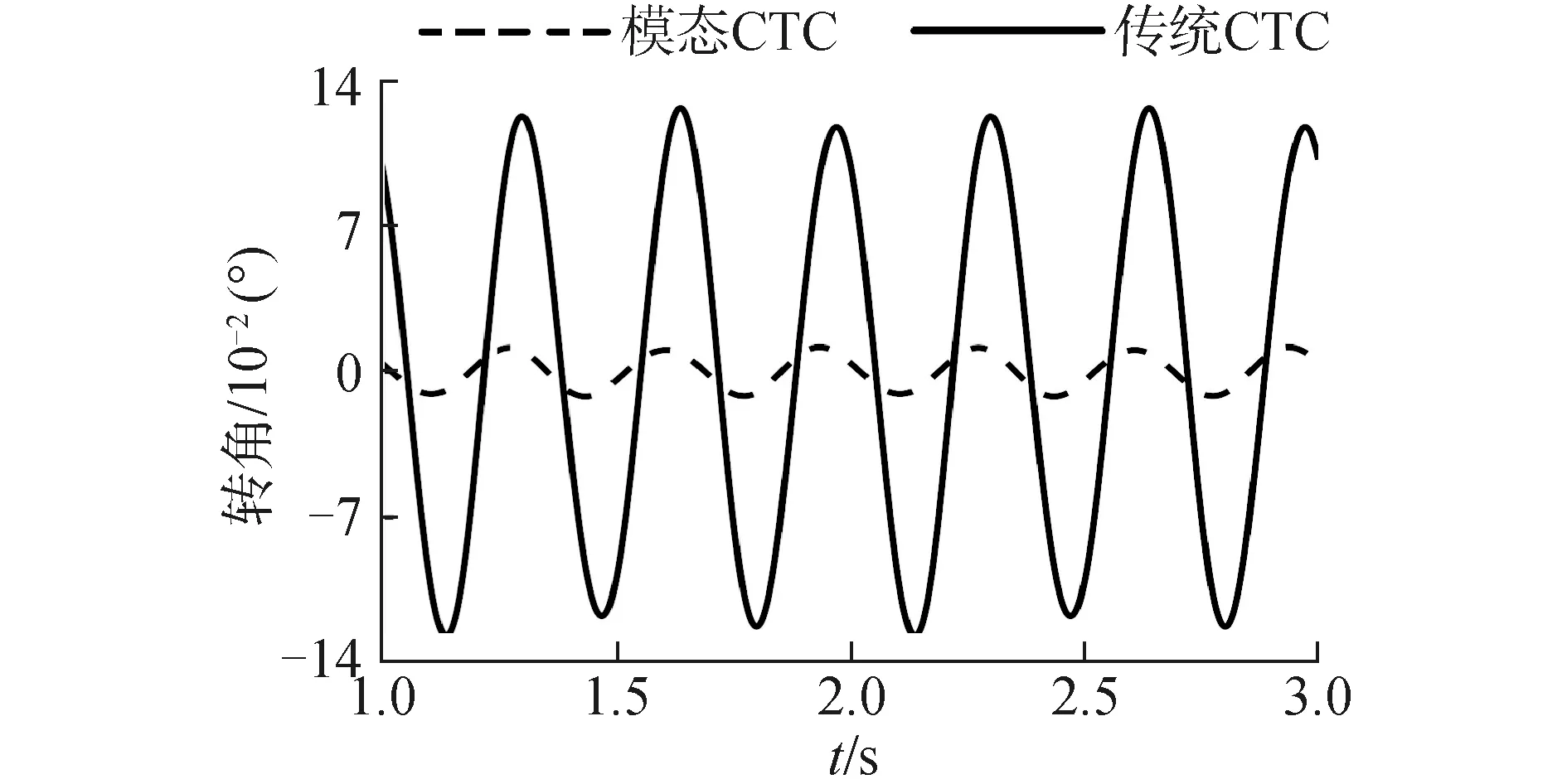
图10 沿X、Y轴平移运动时 RX自由度耦合比较Fig.10 Coupling comparison of RX degree of freedom when translating along the X-axis and Y-axis

图11 沿X、Y轴平移运动时RY自由度耦合比较Fig.11 Coupling comparison of RY degree of freedom when translating along the X-axis and Y-axis
4 结论
1)模态空间控制可以降低系统的控制难度。引入模态空间控制后,系统各控制通道之间由非独立关系转换为了独立关系,因此可以对各个控制通道进行独立的参数整定。
2)模态空间控制可以减少计算力矩控制器控制参数的个数。在模态空间下,每一个模态控制通道都可以视为一个独立的子计算力矩控制器,该子控制器需要调节的参数为2。因此,模态空间计算力矩控制器需要调节的总参数个数为12,相较于传统的计算力矩控制器的参数个数72,模态空间计算力矩控制器的参数得到了大幅度的减少。
3)模态空间计算力矩控制器可以提高系统的控制性能,通过参数整定,可以有效降低系统平移运动时旋转自由度上的耦合转角。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
中国特种设备安全(2022年2期)2022-07-08
昆明医科大学学报(2022年3期)2022-04-19
中学生数理化·中考版(2021年10期)2021-11-22
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
燕山大学学报(2015年4期)2015-12-25