
基于SVD分解的二阶离散时变线性系统稳定性分析
2020-12-14 10:19张行星范秀香赵熙临
计算机应用与软件 2020年12期
付 波 张行星 范秀香 赵熙临 何 莉
(湖北工业大学太阳能高效利用及储能运行控制湖北省重点实验室 湖北 武汉 430068)
0 引 言
离散线性时不变系统的渐进稳定性可以通过判定系统状态矩阵的特征值是否位于复平面单位圆内来判断[1],但是时不变系统的稳定性判据并不适用于离散时变线性系统。冻结法利用线性时不变系统的稳定性判据判断特定条件下线性时变系统的稳定性,但其理论不够严密。
控制系统可以分为离散线性系统和连续线性系统,连续系统的研究相对于离散系统更为完善,但离散系统也起重要作用,很多离散系统可通过连续系统离散化得到,目前已有Euler、Runge-Kutta等离散化方法[2-3]。但连续系统离散化得到的离散系统是否具有原连续系统的稳定性相关性质,依旧是需要继续研究的问题。控制系统稳定性判断[4]方法通常分为两类,一类主要研究系统方程需要满足的条件,另一类是寻求李雅普诺夫函数。对于离散线性系统的研究[5],主要集中在差分方程和微分方程的改造。
齐春子等[6]研究了多变量全系数黄金分割反馈控制系统的稳定性问题,得到了此类闭环系统时变参数变化速度的约束条件。张振国等[7]通过构造L函数,分析了二阶离散时变线性系稳定性的充分条件。关轶峰等[8-9]基于李雅普诺夫理论,提出了离散时变线性系统的充分条件。
本文在这些研究的基础上,对线性离散时变系统的经典状态矩阵做SVD分解,从而得到新的等效状态方程,从李雅普诺夫定理的思路进行思考,经过推导和验证,得到了两个判定线性离散时变系统的稳定性判据和两个不稳定判据。
1 二阶离散时变线性系统及其稳定性
1.1 正交多项式三相递归式稳定性分析
若f(x),g(x)∈C[a,b],ρ(x)为[a,b]上的权函数,且:

(1)
则称f(x)与g(x)在[a,b]上带权ρ(x)正交。只要给定[a,b]上的权函数ρ(x),由{1,x,…,xn,…}利用逐个正交化手续得到正价多项式序列:
(2)
并且满足递推关系:
ρn+1(x)=(x-αn)ρn(x)-βnρn-1(x)n=0,1,…
(3)
其中:
ρ0(x)=1ρ-1(x)=0
(4)
式中:(x-αn)和βn为递归式的系数。
把式(3)的阶数n作为一个离散变量进行思考,则式(3)便可以看成一个离散时变线性系统进行分析。
1.2 李雅普诺夫稳定性定理

定义1说明,对于每一个球域S(ε),若存在一个球域S(δ),当t→∞时,从S(δ)球域出发的轨迹不离开S(ε)球域,则系统的平衡状态在李雅普诺夫意义下是稳定的,如图1(a)所示。

(a)稳定

渐进稳定性是个局部稳定的概念,图1(b)中的球域S(δ)是渐进稳定的范围。
定义3如果从S(δ)球域出发的轨迹,无论S(δ)球域选得多么小,至少有一条轨迹脱离S(ε)球域,则称平衡状态xe为不稳定的。如图1(c)中的轨迹曲线(2)所示。
1.3 SVD稳定性分析
定义二阶离散线性时变系统:
X(k)=G(k)X(k-1)
(5)
式中:2×2状态矩阵G(k)∈C2×2,rankG(k)=2(2>0)。一般采用李雅普诺夫第二法分析系统的稳定性,但是李雅普诺夫函数不易构造。即使构造出该函数,在判定能量增量正定性(或负定性)的过程中,也可能因不等式运算而大大缩小系统稳定或不稳定区间。
对状态矩阵G(k)作SVD分解,存在二阶酉矩阵U(k)和V(k),使得:
G(k)=U(k)S(k)V(k)T
(6)
式中:S(k)=diag(σ1(k),σ2(k))由G(k)唯一确定,σ1(k)≥σ2(k)>0,σi(k)(i=1,2)为G(k)正奇异值;U(k)、V(k)是非唯一酉矩阵。把U(k)、V(k)作为单位旋转矩阵进行讨论,式(5)表示为:
X(k)=U(k)S(k)V(k)TX(k-1)
(7)
将式(7)展开得:
X(k)=U(k)S(k)V(k)T…U(1)S(1)V(1)TX(0)
(8)
重定义R(k)=U(k),R(k-1)=V(k)TU(k-1),Y(0)=V(1)TX(0),Y(k)=X(k),得:
Y(k)=R(k)S(k)R(k-1)S(k-1)…R(1)S(1)Y(0)
(9)
易得单位旋转矩阵R(k):
(10)
令D(k)=R(k)S(k),对于D(k)序列,虽然第k项D(k)的表达式与其他序列不同,但它不影响式(7)的状态稳定性,那么有以下RS系统:
Y(k)=D(k)Y(k-1)
(11)
可见,对二维离散时变线性系统的分析可以等价于对式(11)进行分析,式(5)的稳定性分析也可以等价于对式(11)进行分析。
式(5)中每一个状态矩阵G(k)可以转化成式(9)的两个矩阵R(k)与S(k),图2为矩阵R(k)与矩阵S(k)的作用效果。R(k)可以使向量i逆时针单位旋转θ(k),但并不会改变i的幅值。考虑到σ1(k)>σ2(k),则矩阵S(k)会让向量i在一、三象限进行角度为ω′(k)的顺时针方向旋转(在二、四象限进行同样角度的逆时针旋转),并且改变向量模值的大小。

(a)旋转效果R(k)
2 RS系统稳定性分析
2.1 单象限运动稳定性分析
定理1如图3所示,讨论一类RS系统,Y(k)=D(k)Y(k-1),k=2,3,…,在二维相平面y1-y2内,其状态轨迹最终保持在第一或第三象限。

图3 稳定性运动轨迹的模型
已知σ1(k)>σ2(k),σ2(k)<1,当满足:
0<θ(k)≤θmax(k)
(12)
0<κ2(k)<κ′(k)
(13)
和
(14)
式(11)稳定。
式中:
2.2 单象限运动不稳定性分析
定理2如图4所示,讨论一类RS系统,Y(k)=D(k)Y(k-1),k=2,3,…,在二维相平面y1-y2内,其状态轨迹最终保持在第一或第三象限。

图4 RS系统单象限不稳定情况
已知σ1(k)>σ2(k),σ2(k)<1,当满足:
0<θ(k)≤θmax(k)
(15)
0<κ2(k)<κ′(k)
(16)
和
(17)
式(11)不稳定。
式中:
2.3 二四对象限对向运动稳定性分析
如图5所示,讨论一个RS系统,其状态轨迹保持在第二与第四象限对向运动。

图5 RS系统两象限稳定情况
定理3对于式(11),在二维相平面y1-y2内,已知σ1(k)>σ2(k),σ2(k)<1,当满足:
θmin(k)≤θ(k)<π
(18)
0>κ2(k)>κ′(k)
(19)
和
(20)
式(11)稳定。
式中:
2.4 一三对象限对向运动不稳定性分析
如图6所示,讨论一个RS系统,其状态轨迹保持在第一与第三象限对向运动。

图6 RS系统两象限不稳定情况
定理4对于式(11),在二维相平面y1-y2内,已知σ1(k)>σ2(k),σ2(k)<1,当满足:
(21)
0<κ′(k)<κ*(k)
(22)
和
(23)
式(11)不稳定。

3 实验分析
3.1 单象限运动稳定性实验
Krawtchouk多项式构成的离散时变系统迭代公式如下:
(24)
式中:x=100,p=0.6,N=400。pk(x)初值为(1,1)。
图7为旋转角度θ(k)与极限角度θmax(k)、G(k)的奇异值σ1(k)和σ2(k)、RS变换前后相量模值比H(k)、临界斜率κ2(k)和κ′(k)。图7(c)和(e)显示,当k>1,有0<θ(k)<θmax(k),且0<θ(k)<π/2, 0<κ2(k)<κ′(k),满足式(12)和式(13);图7(d)显示σ1(k)>σ2(k)>0;图7(a)中,当k>5时,有H(k)<1,符合式(14)。由定理1可知,Krawtchouk多项式的三项递归计算在点x=100处稳定。

(a)模值比函数H(k)
Krawtchouk多项式在点x=100递归计算的绝对误差和相对误差分别记录在图8(a)和图8(b)。由图8(a)可知,当0

(a)绝对误差
3.2 单象限运动不稳定性实验
某离散时变系统多项式迭代公式如下:
(25)
式中:x=390,N=400,p=0.9。
图9为旋转角度θ(k)与极限角度θmax(k)、G(k)的奇异值σ1(k)和σ2(k)、RS变换前后相量模值比H(k)、临界斜率κ2(k)和κ′(k)。图9(c)和(e)显示,当k>1,有0<θ(k)<θmax(k),且0<θ(k)<π/2,0<κ2(k)

(a)模值比函数H(k)
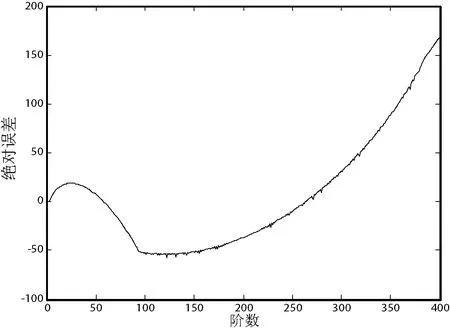
该离散系统的多项式在点x=390递归计算的绝对误差和相对误差分别记录在图10(a)和图10(b)。由图10(a)可知,当k>0时,绝对误差和相对误差均一直增大,相对误差增长趋势较绝对误差增长趋势稍缓,但都发散,与定理2的结论一致。因此该离散系统的多项式至少存在一点x=390具有递归数值不稳定。

(a)绝对误差
3.3 二四对象限稳定性实验
Krawtchouk多项式构成的离散时变系统迭代公式如下:
(26)
式中:x=390,p=0.6,N=400。pk(x)的初值为(1,-1)。
图11记录了旋转角度θ(k)与极限角度θmin(k)、G(k)的奇异值σ1(k)和σ2(k)、RS变换前后相量模值比H(k)、临界斜率κ2(k)和κ′(k)。图7(c)和(e)显示,当k>1,有0<θ(k)<θmax(k)且π/2<θ(k)<π, 0<κ′(k)<κ2(k),满足式(18)和式(19);图11(d)显示σ1(k)>σ2(k)>0;图11(a)中,当k>6时,有H(k)<1,符合式(20)。由定理3可知,Krawtchouk多项式的三项递归计算在点x=390处稳定。

(a)模值比函数H(k)
Krawtchouk多项式在点x=390递归计算的绝对误差和相对误差分别记录在图12(a)和图12(b)中。由图12(a)可见当0

(a)绝对误差
3.4 一三对象限不稳定性实验
某离散时变系统多项式迭代公式如下:
(27)
式中:x=390,p=0.9,N=400。pk(x)初值为(1,1)。
图13为旋转角度θ(k)与极限角度θmin(k)、G(k)的奇异值σ1(k)和σ2(k)、RS变换前后相量模值比H(k)、临界斜率κ*(k)和κ′(k)。图13(c)和(e)显示,当k>50,有0<θmin(k)<θ(k)且π<θ(k)<3π/2,0<κ*(k)<κ′(k),满足式(21)和式(22);图13(d)显示σ1(k)>σ2(k)>0;图13(a)中,当k>25时,有H(k)>1,符合式(23)。由定理4可知,该离散系统多项式的三项递归计算在点x=390处不稳定。

(a)模值比函数H(k)
该离散系统多项式在点x=390递归计算的绝对误差和相对误差分别记录在图14(a)和图14(b)中。由图14(a)可得当0
(a)绝对误差
4 结 语
本文通过SVD分解建立新的离散线性时变系统RS模型,基于李雅普诺夫定理提出关于二阶离散时变线性系统的两个稳定性判断充分条件和两个不稳定性判断充分条件。实验结果验证了所提出的离散线性时变系统稳定性与不稳定性判断条件的有效性。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中等数学(2022年6期)2022-08-29
中学生数理化·高一版(2022年3期)2022-04-05
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21
初中生学习指导·提升版(2020年10期)2020-09-10
校园英语·上旬(2019年6期)2019-10-09
阅读与作文(英语初中版)(2019年11期)2019-09-10
软件(2017年9期)2018-03-02
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
智富时代(2017年4期)2017-04-27
