
船舶外板喷涂机器人设计
2020-12-17 03:29周雨桐
科教导刊·电子版 2020年16期
关键词:机械臂
周雨桐
摘 要 船舶外板涂装具有美化、防腐蚀等功能,在延长船舶工作期限方面具有重要意义。目前采用人工涂装方法存在自动化程度低、作业效率低等问题,且面临涂料中毒及人员坠落危险,而爬壁喷涂机器人可以将工人从艰苦的工作环境中解放出来,还可以提高涂装精度,但传统的爬壁机器人吸附及行走方式并不能够直接用于船舶外板涂装工作。在本文中,通过比较分析传统爬壁机器人的行走及吸附方式,选取履带式移动方式、磁吸附为主真空吸附为辅的复合式吸附方式,设计吸附行走模块,选择旋杯静电喷枪以及四杆机构作为机械臂,设计喷涂模块,实现了船舶外板喷涂机器人的设计。
关键词 爬壁喷涂机器人 吸附行走模块 喷涂模块 机械臂
中图分类号:TP242文献标识码:A
0引言
船舶外板在高温、高湿、高盐等工作环境中普遍存在电化学腐蚀、化学腐蚀、生物腐蚀等问题,增加了船舶的维修成本,降低了船舶的使用寿命。船舶涂装,即在船舶钢材表面进行涂装,对提高船舶的耐腐蚀性和使用寿命具有重要意义。目前,船舶涂装作为船厂中最艰苦的工种之一,仍大量采用人工喷涂的作业方式,存在工人因有害气体中毒、将喷枪长时间举在高空造成眩晕坠落等问题。
爬壁喷涂机器人是一种工作在任意角度壁面并携带喷涂模块的特种机器人,可代替工人进行船舶外板喷涂作业,具有工作效率高,油漆利用率高,成本低等优点。爬壁机器人的正常工作需要两个条件:行走能力和吸附能力。吸附能力是指在任何工作环境下,机器人都能保证吸附在作业壁面上不发生坠落的能力,行走能力则是指在保证机器人吸附在壁面的前提下,能够根据指令自由的移动。机器人壁面吸附能力的提高必然会影响到行走能力,反之亦然,所以,在设计爬壁机器人时必须综合考虑这两个方面,得到最适合的解决方案。
1船舶外板喷涂机器人总体设计
爬壁机器人属于移动机器人,与地面移动机器人相比有很多相同的地方,但由于特殊的工作环境,在结构方面又有一些差别,主要体现在以下几个方面:
(1)吸附机构。吸附机构的作用是产生平衡机器人重力的吸附力,使其稳定吸附在壁面上。目前常见的吸附方式有磁力吸附、真空吸附、螺旋桨推力等。
(2)行走机构。行走机构的作用为在保证机器人可靠吸附的前提下实现自由移动。爬壁机器人的行走方式包括履带式、轮式、仿生式、足式等。
(3)能源及驱动方式。由于爬壁机器人需长时间工作在壁面上,所以主要通过电线和管路对机器人进行能源供应,驱动方式有电机驱动、气动等方式。
(4)安全措施。为防止机器人在作业时发生坠落或坠落发生后减小机器人的受损害程度,目前爬壁机器人大都采用系在机器人上的绳索进行防护。
在设计船舶分段外板喷涂机器人时,需要重点考虑在船舶外板工作环境中可靠的吸附能力以及灵活的移动能力,即对应的吸附机构和行走机构设计。除此之外,还要实现喷涂功能。由于船舶外板的曲率随着机器人的移动不断发生变化,并且不同的涂料所需的喷涂高度也有所区别,所以在喷涂模块的设计中除了选择合适的喷枪,同时还要设计一种机构调节喷枪作业高度以满足喷涂需求。
2吸附行走模块设计
2.1 行走方式的选取
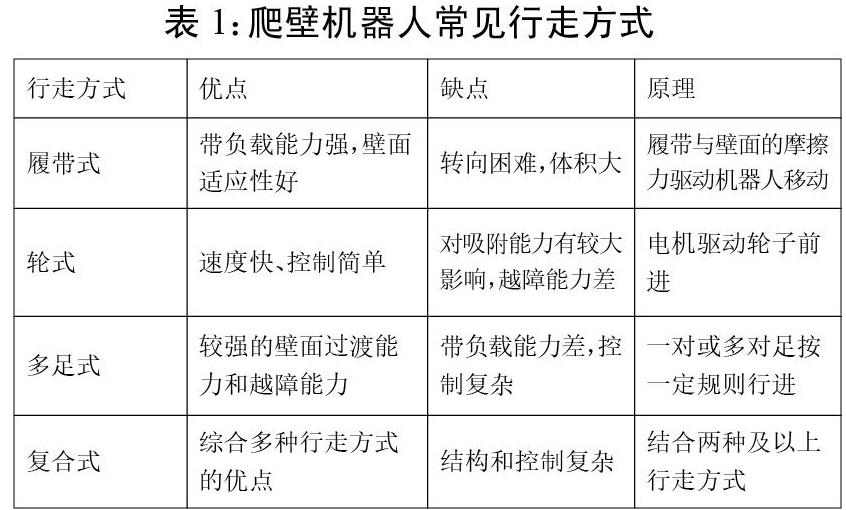
除了应用广泛的轮式、履带式和多足式外,在一些特殊场合还会应用到轨道式、仿生式、复合式等。不同的行走方式有其各自的有缺点,需要根据各自的适用场合选择最佳的行走方式。表1为常见移动方式的归纳对比。
表1:爬壁机器人常见行走方式
一方面,考虑到船舶外板曲率变化平缓,所以爬壁机器人可弱化壁面过渡能力和越障能力。另一方面,因为爬壁机器人需携带喷枪等作业工具,应具有一定的带负载能力。综合考虑以上两点,可选用履带式移动方式。
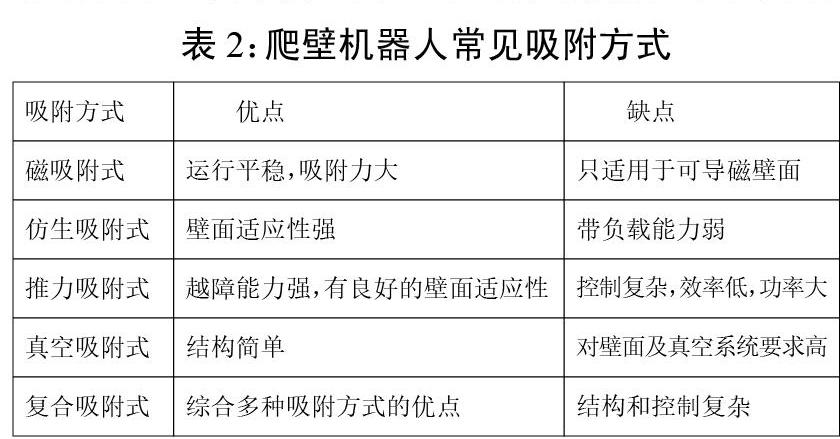
2.2 吸附方式的选取
因爬壁机器人多在距地较高的竖直壁面、倒悬壁面作业,吸附能力对爬壁机器人及地面工作者的安全则显得至关重要。同时,吸附能力越强,对爬壁机器人自由移动的影响也就越大,造成能源的不必要浪费。因此,在选取吸附方式时,要结合行走方式和实际的作业要求,综合分析。表2所示为爬壁机器人常见的吸附方式归纳对比。
由于船舶外板属于可导磁壁面,且爬壁喷涂机器人需要具有较大的带负载能力,故可选用磁吸附作为主要的吸附方式。磁吸附包括永磁吸附和电磁吸附两种,电磁吸附具有磁力可控的优点,但当发生断电情况时吸附能力消失,易发生危险,并且结构笨重,所以采用永磁体吸附方式。值得注意的是,目前已有的履带磁吸附式爬壁机器人的吸附力较大,需要的驱动功率也变大,易造成磁块的挤压破坏,而且,履带与壁面的接触面积较大,导致轉向困难。所以,在选择吸附方式时,可额外增加一种辅助吸附方式,用来改善单一吸附方式带来的不足。
考虑到船舶外板喷涂油漆之前,需要对外板表面除锈清洁,目前常采用水射流除锈机器人进行作业。承载作业的执行机构由真空封闭腔,水射流旋转喷头组成。因为水射流作业真空腔是除锈爬壁机器人的共性,故可选用真空吸附方式作为辅助吸附方式,为爬壁喷涂机器人之后的功能拓展提供空间。
综上,该机器人采用以永磁吸附为主,真空吸附为辅的复合式吸附方式。
2.3 吸附行走模块的设计
通常爬壁机器人的行走及吸附方式联系密切,将两者统一设计,满足实际的需要,也有利于简化机构,使机器人整体更加紧凑。
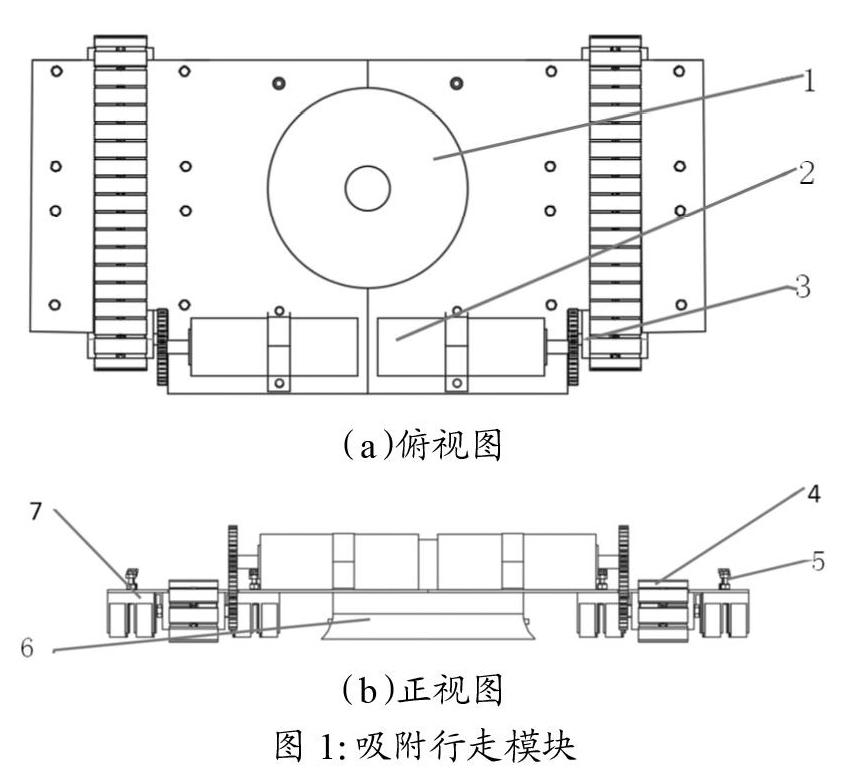
爬壁喷涂机器人的吸附行走模块由以下零部件组成:真空吸附腔、气动马达、传动齿轮、履带、间隙调节螺栓和永磁吸附单元,连接关系如图1所示。两块永磁体构成一个永磁吸附单元,共有8组永磁吸附单元对称分布在两条履带两侧。每条履带安装在两个从动轮和一个主动轮上,主动轮通过传动轴和传动齿轮由气动马达驱动。在机架平台中间是真空吸附腔,由真空抽吸空通过真空管道与地面的真空泵相连。真空吸附腔的下方是柔性密封裙边,可保证腔体与壁面的均匀贴合。
(a)俯视图
(b)正视图
1.真空吸附腔 2.气动马达 3.传动齿轮 4.履带5.间隙调节螺栓 6.密封裙边 7.永磁吸附单元
3喷涂模块的结构设计
3.1喷枪的选择
根据船舶外板涂装要求,选择旋杯静电喷枪,与其他喷涂方式相比,具有如下优势:
(1)传统旋杯喷枪在进行喷涂作业的时候容易产生漆膜厚度不一致的问题,旋杯静电喷枪良好的漆雾穿透能力很好地解决了该问题;
(2)涂料利用率大幅提高。一般空气喷涂的涂料利用率仅为30%~50%,而旋杯静电喷枪的率用率高达85%,可节省一半以上的油漆;
(3)提高劳动生产率。多支喷枪可同时喷涂,生产效率比空气喷涂提高了1~3倍。
3.2 喷涂参数的选择
船舶各部分接触到的腐蚀介质不同,受到的腐蚀性质和程度也就不同,因而油漆的选用要针对船舶不同部位进行选择。对于船舶外板而言,要求涂料耐候性好,色泽鲜艳,有一定耐水性,可选用的防锈漆包括氯化橡胶系、环氧系和酚醛醇酸系等。
3.3 机械臂的结构设计
考虑到爬壁喷涂机器人的机械臂的首要任务是调整喷枪距离作业壁面的距离,并且爬壁机器人功能拓展空间和带负载能力有限,所以可将机械臂的运动形式设计为关节型,如图2所示。平行四边形机构的一个主要特点是它的两组相对杆始终保持平行,且两连架杆的角位移、角速度始终相等,基于这一特点,可将喷涂模块的机械臂设计成该类型机构,喷枪夹持工具布置在连杆l2上。
4结论
针对目前船舶涂装岗位自动化程度不高,工人作业存在各种安全隐患等情况,通过大量查阅有关爬壁机器人及喷涂机构的相关资料,分析国内外爬壁机器人的发展现状,归纳对比常见吸附和运动方式,提出了间隙式爬壁喷涂机器人的设计思路,设计了一款间隙式爬壁喷涂机器人,完成了相应的机械结构设计。
本文仍存在以下问题有待完善:机器人总体结构设计不够紧凑,存在大量空间未被充分利用;所设计的结构未通过计算和实验进行验证。
参考文献
[1] 陈念宁,谭伟民.现代船舶涂装技术的重点与难点分析[J].珠江水运,2018(18):42-43.
[2] 衣正尧,林焰,刘英想.造船工业机器人现状分析[J].機械工程师,2016(07):89-92.
[3] 李庆宁,王金鑫.船舶涂装技术[M].哈尔滨:哈尔滨工程大学出版社,2014.
[4] 王兴如,衣正尧,弓永军等.履带式船舶除锈爬壁机器人关键机构设计[J].机械设计,2009,26(12):32-34.
[5] 林焰,衣正尧,李玉平,纪卓尚,刘英想,裴斐,李冰.大型船用坞内外板涂装机器人[J].机器人,2018,40(01):115-128.
[6] 董艳冲.船舶腐蚀与保护方法[J].化工管理,2019(06):173-174.
猜你喜欢
科技与创新(2016年23期)2017-03-30
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
