
基于改进粒子滤波的重型燃气轮机跳机故障预测
2021-02-24 04:51柳亦兵
中国机械工程 2021年2期
滕 伟 韩 琛 赵 立 武 鑫 柳亦兵
华北电力大学电站能量传递转化与系统教育部重点实验室,北京,102206
0 引言
重型燃气轮机是以天然气、煤制气等作为能源介质进行清洁发电的电力装备[1-2],在整体煤气化联合循环发电系统、燃气-蒸汽联合循环系统中占据重要地位。在燃气轮机运行过程中,转子系统高速旋转,且处于高温高压的运行环境,容易出现诸如压气机叶片裂纹、高温透平涂层缺失、燃烧室磨损及燃烧振荡等故障,影响正常的发电工作,甚至发生严重的运行事故。
剩余寿命预测通过监测对应健康指标的变化规律,预测其未来发展的趋势,可为燃气轮机的维护检修及控制决策提供技术指导。ZHOU等[3]考虑历史数据和运行工况,提出一种新的健康指标用于表征燃气轮机的性能退化;肖力伟等[4]采用流-热-固耦合方法对燃气轮机透平动叶片的流场、温度场及应力分布进行分析,并计算叶片的蠕变寿命;李慧华[5]提出采用支持向量机和小波神经网络组合的预测方法进行燃气轮机主泵寿命预测;ZAIDAN等[6]基于分层次贝叶斯模型,运用排气温度设计了航空燃气轮机的性能退化指标,并进行了剩余寿命预测;滕伟等[7]提出一种基于数据驱动的燃气轮机剩余寿命预测方法,通过C-MAPSS软件所提供的燃气轮机运行数据进行验证,取得了较好的预测效果;BARAD等[8]基于神经网络进行燃气轮机的多参数融合,进而评估其机械部件性能及健康状态;TSOUTSANIS等[9]拟合了旋转的椭圆轨迹,用于诊断与预测燃气轮机的压气机污染故障。
跳机故障是由于振动加大而触发的非计划突然停机,具有显著的趋势性,会对燃气轮机的核心部件(如叶片、拉杆等)产生较大冲击,造成设备损伤,因此,根据跳机故障中振动趋势的发展规律,运用数据驱动方法探测跳机故障发生时刻,及时进行维护或控制干预,将有助于避免重大事故的发生。
近年来,粒子滤波在结构裂纹、轴承与电池等的寿命预测中获得广泛应用[10-12]。然而,粒子匮乏问题会使某几个粒子的权重过大,权重过小的粒子失去存在价值,导致系统的状态估计出现较大偏差[13]。为此,研究者们开发了包括多项式重采样、残差重采样、分层重采样和系统重采样等的多种重采样技术[14-15],能够解决粒子权重退化的问题,但粒子的多样性依然缺失。DAROOGHEH等[16]结合动态线性模型和粒子滤波进行航空发动机的失效预测,但未涉及避免粒子匮乏的方法讨论。在轴承寿命预测方面,CHENG等[17]提出了一种改进的多项式重采样技术以提高粒子的多样性,该方法在提高状态估计精度方面起到一定作用,但需要对小权重粒子逐个修改,算法整体较为复杂。
本文提出一种二次重采样策略对传统粒子滤波方法予以改进,该方法仅需对现有重采样后的粒子进行二次均匀随机采样,能够克服粒子匮乏所致的粒子多样性不足的问题,实现精确的状态估计,同时具有应用简单的特点。本文方法可应用于具有退化过程的机械设备的趋势或剩余使用寿命预测,在某300 MW重型燃气轮机的跳机故障预测中得到验证。
1 燃气轮机与振动监测
1.1 重型燃气轮机
重型燃气轮机以天燃气为工质,通过燃气的膨胀功推动燃机透平高速转动,将燃气的化学能转变为机械能,进一步通过发电机转换为电能。其机械结构主要分为压气机进气段、压气机、燃烧器、透平和透平排气段,如图1所示[18]。首先外部过滤空气经轴流式压气机逐级压缩增压并升温,然后压缩空气与燃料混合并在燃烧器内点火做功,产生高温高压的燃气,进一步推动透平叶片旋转做功,做功后的燃气通过排气段排出。
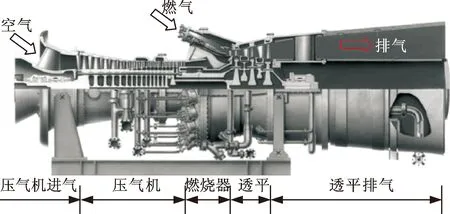
图1 重型燃气轮机结构
1.2 燃气轮机振动监测保护系统
重型燃气轮机的轴系监测系统通常采用电涡流传感器、速度传感器、压力传感器、信号调理器及信号分析软件监测轴系的相对振动、绝对振动、轴位移、轴偏心、动态压力和胀差等相关参数,所具有的保护功能主要包括:①超速保护。实现机组故障或超速时的控制,避免飞车事故。②转子轴振监测。监测转子轴系与轴承座的相对振动,振动过大时,实现跳机保护。③轴承座绝对振动监测。某些机械故障(如碰摩)的轴振灵敏度比轴承座振动的灵敏度要小,从安全性的角度出发,燃气轮机除了安装非接触式涡流传感器监视轴振外,还需在轴承座或缸体上安装速度传感器以测量结构振动。④转子轴位移监测。轴向位移超过预留间隙时,会造成叶片折断、大轴弯曲、隔板和叶轮碎裂等恶性事故,需要时刻监测轴位移的变化。⑤燃烧室振动加速度监测。监测均相预混燃烧方式下可能发生的振荡燃烧现象,避免燃烧室较大幅度的脉动压力所造成的燃烧室部件损坏。
2 改进粒子滤波方法
2.1 传统粒子滤波
粒子滤波是卡尔曼滤波的扩展形式,早期主要用于系统的状态跟踪。与卡尔曼滤波不同的是,粒子滤波通过不断迭代粒子值更新系统的状态,而不受限于状态转移矩阵或观测矩阵的高斯性假设,在处理非线性、非高斯系统时具有较高的状态估计精度。一个典型的动态系统可描述为
xk=f(xk-1,vk-1)
(1)
zk=h(xk,wk)
(2)
式(1)为状态模型,式(2)为测量模型。xk与zk分别为系统第k步的状态值与测量值,f(·)和h(·)是系统的状态转移函数和观测函数。vk-1为第k-1步的状态噪声,wk为第k步的测量噪声。
粒子滤波的目的是通过已有观测值z1:k估计状态的后验密度分布p(xk|z1:k)。由于状态xk依赖于状态xk-1,首先分析后验密度分布的递归形式p(x0:k|z1:k)。理论上,如果能够从概率分布p(x0:k|z1:k)获得足够多具有合理权重wk的粒子,则p(x0:k|z1:k)可被近似为[13]
(3)

(4)
其中,q(x0:k|z1:k) 为重要度密度,它可被分解为
q(x0:k|z1:k)=q(xk|x0:k-1,z1:k)q(x0:k-1|z1:k-1)
(5)
考虑到具体物理意义,q(x0:k-1|z1:k-1) 等价于q(x0:k-1|z1:k) 。p(x0:k|z0:k)的递归计算结果为[13]
p(x0:k|z1:k)∝p(zk|xk)p(xk|xk-1)p(x0:k-1|z1:k-1)
(6)
(7)

(8)
(9)
进一步,系统的状态值被估计为
(10)
2.2 重采样改进算法
粒子滤波在循环迭代运算时,有可能导致粒子的权重变得过于集中,少数几个粒子的权重会大于其他所有粒子权重之和,这种现象称为粒子匮乏。当粒子匮乏发生时,除了几个权重较大的粒子之外,其他粒子对系统状态的先验分布几乎没有影响,这就导致滤波器难以对系统状态进行精确估计,且预测结果存在较大的随机性。为克服粒子匮乏,研究者们设计了重采样算法[15],即采用权重较大的粒子代替权重较小的粒子,以此保证不同粒子之间权重相对平均,从而避免权重过度地集中于一个或几个粒子之上。
但是上述重采样算法会产生新的问题:不断地采用权重较大的粒子替代权重较小的粒子,会导致粒子变得很相似,多次重采样之后的粒子很可能都是从少数几个“优质”粒子继承而来的。虽然各个粒子的权重较为均匀,然而由于各个粒子高度相似,依然不能很好地表示系统状态的概率分布,无法从根本上解决问题。
改进的重采样算法不直接对大权重粒子进行复制,而是以这些粒子为中心形成新的概率分布,然后从中随机采样新的粒子。新的概率分布采用均匀分布,形成二次重采样过程如下:
(11)

3 燃气轮机跳机故障预测方案
燃气轮机运行过程中出现燃烧振荡、压气机喘振等运行故障时,其轴系振动出现明显变化,若不及时采取措施,在振动超限时,机组需要进行自动跳机,以保护核心部件与系统。由此可见,轴系振动随着故障的劣化呈现显著的趋势性。通过对振动趋势的分析与预测,可以计算故障诱发的跳机时刻,从而确定剩余跳机时间。本文提出基于改进粒子滤波的重型燃气轮机跳机故障预测流程,在实际应用时,观察监测参数的变化,若一段较短时间内振动趋势变化明显,则触发预测流程如图2所示。具体步骤如下:
(1)定义系统退化的状态转移模型,通常假定系统失效服从指数或直线退化模型。
(2)初始化模型参数,如初始系统状态可由预测起始时刻的观测值确定。
(3)按式(1)进行一步预测,由于测量模型未知,采用如下方式获得似然值:假定粒子似然值服从正态分布,其均值为当前时刻观测值与粒子状态之差,标准差为当前时刻之前若干时刻的观测值标准差。
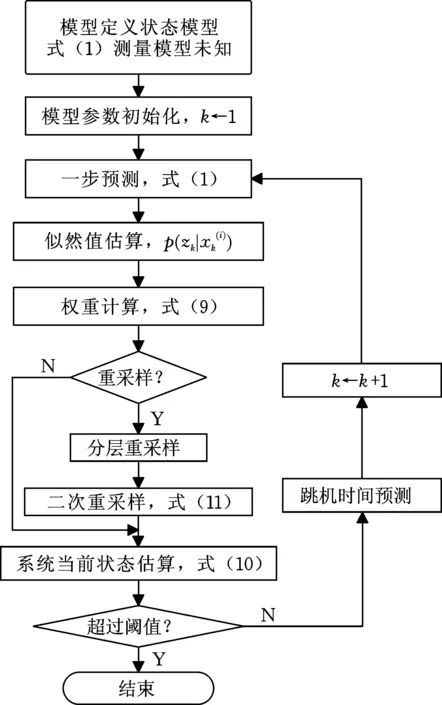
图2 基于改进粒子滤波的跳机故障预测流程
(4)按式(9)计算粒子权重,根据权重平方的倒数是否小于粒子数的一半确定是否触发重采样,若是,触发分层重采样[15],之后进入二次重采样;反之,则进行状态估计。
(5)重采样之后的粒子按式(10)估算当前的系统状态,若此状态超过失效阈值,预测结束;反之,进行失效时间预测,同时,观测时刻k←k+1。
运用当前时刻的系统状态和参数按式(1)持续计算系统未来的状态值,未来状态大于阈值时对应的时间即为跳机时间。
4 案例分析
某燃气-蒸汽联合循环发电厂300 MW燃气轮机轴系结构如图3所示,励磁机ER、发电机G及燃气轮机本体(压缩机C、燃烧器C、透平T)组成的转子轴系由6个滑动轴承支撑,每个轴承安装2个电涡流传感器用以测量轴与轴瓦的相对振动,安装2个速度传感器测量轴瓦绝对振动,同时实现振动报警与跳机保护。
某时刻,该燃气轮机为追求排放达标,进行天然气和空气的预混实验,导致出现燃烧振荡,最终跳机。图4所示为跳机故障前后的监测参数,图4a示出燃气轮机转速、功率和排气温度信息,在1162 s处跳机故障产生之前,转速和排气温度几乎保持恒定,有功功率略有下降。图4b所示为1号瓦和2号瓦的瓦振信号,可以看出,1WY、2WX和2WY随着本次跳机故障的临近,呈现明显的上升趋势,而1WX对燃烧调节波动不敏感,可能与1号瓦X向的轴承支撑刚度较大有关。
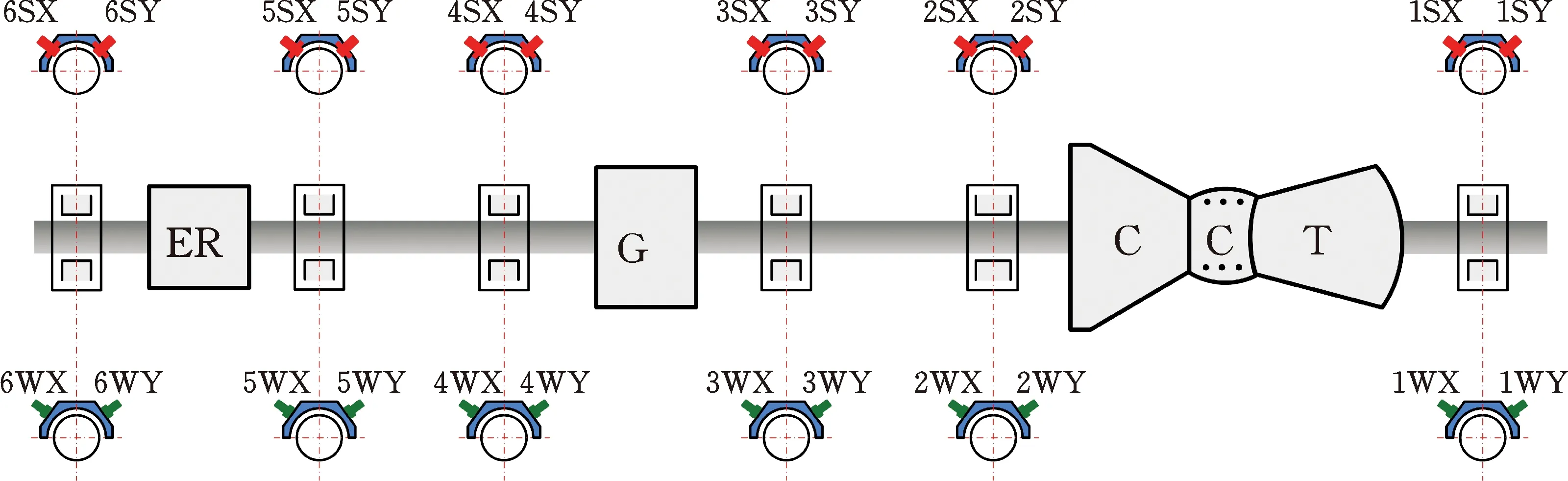
图3 重型燃气轮机轴系结构
燃气轮机有功功率的微弱减小可由很多因素诱发,如调节负荷等,因而有功功率无法作为跳机故障预测的有效指标。而振动信号具有明显的趋势性特征,可为跳机故障的发生提供预测。图4b为每隔1 s采集的1号瓦和2号瓦的瓦振信号的有效值,振动从约800 s处开始增大,预示着此时出现燃烧振荡,在1150 s处实施跳机保护,振动开始减弱,转速也逐渐下降(图4a中红色点线所示),在1200 s时振动突然加大,表明此时燃气轮机转速与转子固有频率耦合。
从800 s开始,燃气轮机出现燃烧振荡并导致振动增大,由于振动趋势变化保持一段时间(约40 s),因此,自840s开始,进行跳机故障预测。选取振动最大的1 WY振动信号进行跳机故障预测,其振动幅值如图4b中实线所示。原始燃机振动信号中噪声较大,通常采用有效值(均方根值)表征振动规律,原始振动信号的跳机阈值为14.3 mm/s,本案例中,经有效值折算,其有效值阈值为4.38 mm/s,如图5a所示。

(a) 转速、功率、排气温度曲线

(a) 状态估计结果及置信区间
从图5a可以看出,跳机故障形成过程中,振动信号的发展趋势可以看成以970 s为拐点的两条直线组成的折线。因此,采用直线方程建立状态模型:
mk=mk-1+nk-1
(12)
其中,mk代表k时刻的系统状态,也即粒子滤波估计的振动幅值。nk-1为系统噪声,其更新过程由改进的重采样方法实现。对于任意时刻k,系统粒子向量可以写为
(13)
跳机故障预测中的测量方程式(2)无法直接建模,其主要影响式(9)中似然函数的计算。为此,对测量值(振动有效值)与预测值的差值进行正态性假定,获得似然函数。
采用均匀分布初始化粒子,本案例中,选择预测起始时刻测量值的0.9~1.1倍之间的随机采样作为初始粒子。粒子数为3000。按图2所示的预测流程进行跳机时间预测,结果如图5所示,图5a为改进粒子滤波的状态估计结果及±30%置信区间,可以看出滤波结果较好地跟踪了振动趋势,在1000s附近跟随振动幅值的变化实现了趋势的转折。图5b为预测的跳机时间,蓝色实线为实际的跳机时间。可以看到,预测的跳机时间(红色实线)在初始阶段偏离实际时间,但随着时间的发展,其与实际的跳机时间吻合良好,具有较高的预测精度,可以为重型燃气轮机的运行策略提供指导。
图6所示为预测跳机时刻的系统状态粒子的分布,该时刻粒子均值约4.5 mm/s,与失效阈值接近,粒子呈正态分布,说明采取本文所提出的二次重采样策略,粒子既不会过度集中导致粒子同质化严重,也不会过度分散而导致存在大量劣质粒子。

图6 基于改进粒子滤波的跳机故障时刻的粒子分布
相比之下,采用传统粒子滤波,即没有进行二次重采样的跳机时间预测结果如图7所示,滤波的系统状态(图7a)呈直线状,完全取决于设定的趋势曲线,而与观测的振动值关联性不强。图7b中预测的剩余跳机时间也与实际剩余时间存在较大差距,无法提供精确的预测结果。预测失败的原因在于传统的分层重采样无法提供多样化的粒子,而是重复选用权重较大的粒子,经多次迭代之后,粒子聚集于一点,失去了统计意义。失效时刻的系统状态粒子分布如图8所示,所有粒子集中在4.8 mm/s处,无法准确刻画系统的真实状态。

(a) 滤波的系统状态

图8 基于传统粒子滤波的跳机故障时刻的粒子分布
5 结论
本文针对重型燃气轮机跳机故障中的振动趋势规律,提出一种二次重采样方法对粒子滤波的重采样技术进行改进,基于改进的粒子滤波框架,提出燃气轮机跳机故障预测方法。本文方法能够抵抗粒子匮乏对系统状态估计的不良影响,增强了粒子滤波的稳定性。实际预测结果表明,改进粒子滤波能够基于观测的振动值进行系统状态的精确估计,进而准确预测故障发生的时刻,可为燃气轮机的控制策略调整提供指导,从而避免更为严重的故障。
猜你喜欢
山东工业技术(2017年22期)2017-11-20
进出口经理人(2017年9期)2017-09-22
中国核电(2017年2期)2017-08-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
中国建筑科学(2014年11期)2014-12-12
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
