一种基于矩阵重组的功率倒置改进算法*
2021-02-25 04:38吴文浩赖鹏辉王世练
电讯技术 2021年2期
吴文浩,赖鹏辉,王 昊,王世练,张 炜
(国防科技大学 电子科学学院,长沙 410073)
0 引 言
自适应天线通过控制阵列中各阵元的增益和相位,使阵列方向图在干扰方向形成零陷,达到抑制干扰的效果[1],是一种有效的抗干扰方法。经典的阵列加权准则包括最小均方误差(Minimum Mean Square Error,MMSE)准则[2]、最小方差无失真响应(Minimum Variance Distortionless Response,MVDR)准则[3]、最大信干噪比(Maximum Signal to Interference and Noise Ratio,MSINR)准则。功率倒置(Power Inversion,PI)自适应算法[4-6]是基于线性约束最小方差准则建立的,属于盲抗干扰准则,具有“强干扰强抑制,弱干扰弱抑制”特点,不需要先验信息辅助,可采用直接协方差矩阵求逆(Sample Matrix Inverse,SMI)、最小均方误差(Least Mean Square,LMS)和递推最小二乘法(Recursive Least Squares,RLS)等算法。
功率倒置广泛应用在抗干扰接收机中,如定位导航系统、遥测系统、卫星通信等。文献[1]通过监测干扰数目或功率的突变,复位处理权值矢量,提高PI阵的收敛速度。文献[6]采用RLS算法实现PI阵列,解决收敛性与稳态失调矛盾,但运算量大,对硬件运算要求高。文献[7]采用指数函数的归一化变步长LMS算法,兼顾收敛速度和稳态误差,增大算法的输入功率。文献[8]通过将信号投影到噪声空间,提高PI算法在弱干扰下的抗干扰性。上述算法从收敛速度、稳态误差、抗干扰范围方面提升PI阵性能,各有优点,但存在共同问题——信噪比恶化现象。
本文针对信噪比恶化问题,利用信号子空间正交性来改进PI算法,改善信噪比恶化问题,提高信干噪比增益,改善算法有效性。
1 功率倒置算法

y(n)=wHx(n) 。
(1)

图1 M元天线阵结构
算法满足如下约束准则,使其输出功率最小:
(2)
式中:RXX为接收信号协方差矩阵,s0为约束条件。为防止w全为零而没有意义,取s0=[1,0,…,0]T。构建拉格朗日函数,可得最优权矢量
(3)

针对观测信号的协方差估计可采用块自适应算法和连续自适应算法。假设系统接收信号包括扩频信号s(t)、干扰信号i(t)、噪声n(t),其中噪声服从高斯分布,与扩频信号、干扰信号互不相关,干扰信号与扩频信号相关系数为ρ(θ),θ为信号与干扰的夹角。对于平稳信号,接收信号的协方差估计是正Hermitian矩阵,
(4)


(5)
式中:ηs是期望信号对应特征向量。则对应的逆矩阵

(6)
(7)

图2(a)、(b)分别是信干比SJR为-50、-20 dB时,SMI法和EVD-1法的方向图。对于SMI法,其方向图在不同干扰强度形成不同深度零陷,干扰越强,零陷越深;干扰越弱,零陷较浅,(b)中零陷约为-13.5 dB。对于EVD-1法,其方向图在强干扰下形成零陷较深,与SMI法相近;在弱干扰下,EVD-1法形成零陷远深于SMI法,(b)中零陷约为-64 dB。当SJR为-50 dB时,两种算法信噪比恶化约为-0.879 3 dB;当SJR为-20 dB时,信噪比恶化约为-0.986 1 dB。
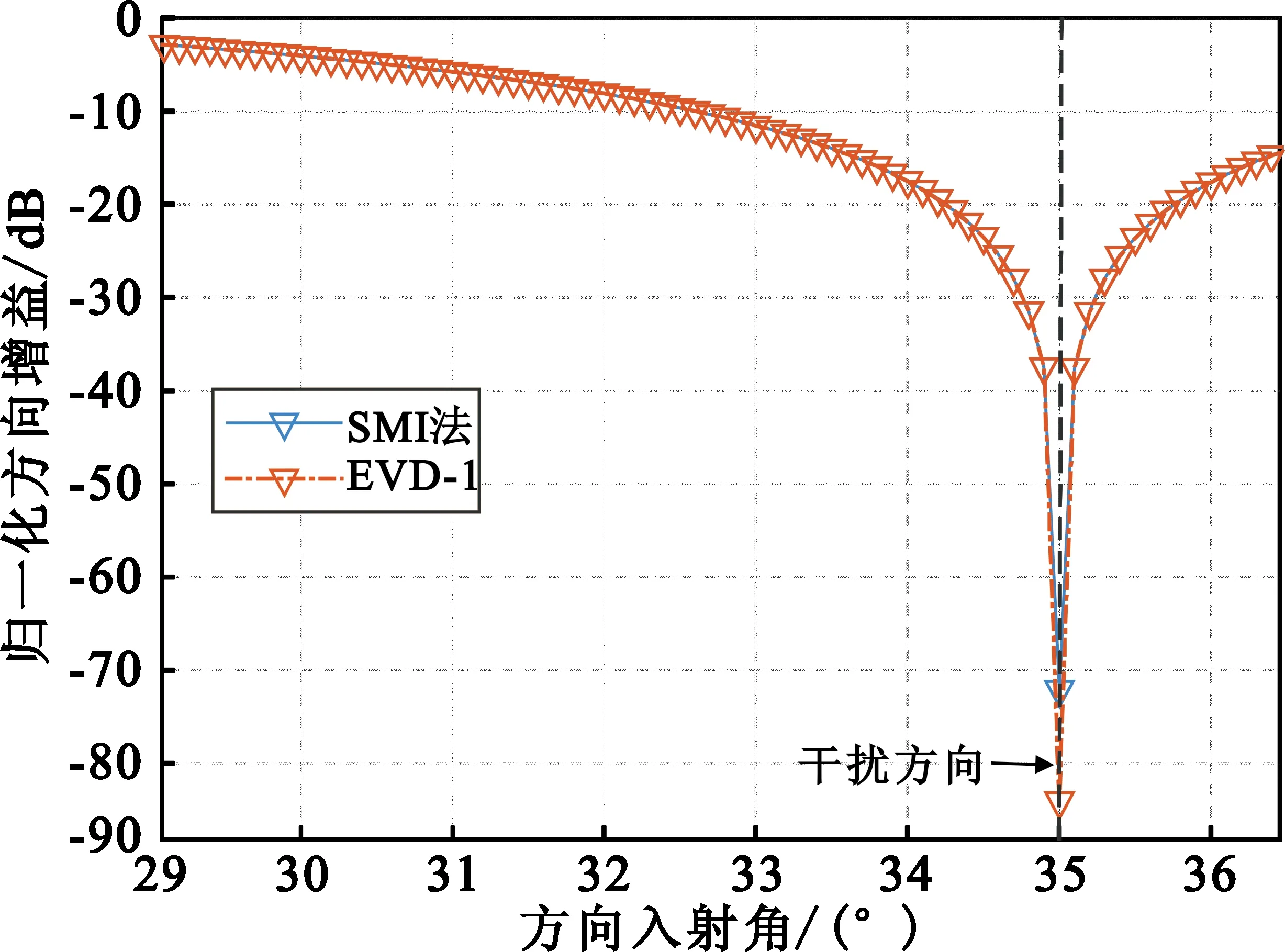
(a)SJR为-50 dB

(b)SJR为-20 dB图2 SMI和EVD-1算法对比图
2 基于特征分解的块自适应算法改进
由上述仿真可知,传统PI算法和EVD-1算法在干扰来向形成零陷的同时在期望方向存在小幅度抑制,有信噪比恶化现象。由式(7)可知,传统PI算法最优权值矢量是样本协方差矩阵中干扰信号、扩频信号(期望信号)、噪声对应特征向量的线性组合,分别对应等式右边第一、二、三项。由于扩频信号(期望信号)一般淹没在热噪声中(信噪比小于-20 dB),一般情况下可将后两项看作一项。干扰特征向量与干扰信号导向矢量wopt张成同一子空间,则干扰信号导向矢量为干扰信号特征向量的线性组合。强干扰环境下,干扰特征值远大于噪声对应的特征值,对wopt的影响反而小,即wopt是噪声特征向量的线性组合,因此wopt与干扰信号导向矢量正交,在干扰方向上形成较深的零陷;而弱干扰环境下干扰特征值较小,与噪声特征值接近,wopt是两者特征向量线性组合,因此在干扰方向上无法形成较深零陷。EVD-1算法中将式(7)中干扰项舍去,实质上等同干扰功率无穷大,由上面分析可知,在弱干扰环境下可形成较深零陷。
下面从信噪比增益角度分析恶化原因。首先给出信噪比增益表达式:

(8)

(9)

本文提出一种基于矩阵重组的功率倒置改进算法EVD-NN(Eigenvalue Decomposition with No Noise),在不含先验信息条件下,对接收信号协方差矩阵做特征分解,根据特征值分布对噪声进行估计,舍去噪声特征向量,保留主特征向量和期望信号特征向量(信源数为1),重组得到新协方差矩阵逆矩阵,进而求得最优权值矢量。新的协方差矩阵逆矩阵、权值矢量和方向增益表达式如下:
(10)
(11)
(12)
由式(11)可知,新权值矢量仅由干扰和期望信号对应的特征向量组成,新的干扰子空间与非干扰子空间正交。当期望方向与干扰来向夹角较大(两者相关性更小)时,在干扰方向,式(12)右边第一项取值随着干扰功率增大而减小,第二项为零;在期望方向,右边第一项近乎为零(期望信号与干扰不相关),第二项不为零且取值较大(期望信号功率较小),此时取得方向增益最大值;对于其他入射角,其导向矢量由干扰、期望信号、噪声三者的特征向量组成,式(12)右边有不定取值,与期望信号和干扰功率大小有关,此处不作研究。
本文算法流程下:
(1)由M个天线阵元接收信号计算得协方差矩阵Rxx特征值分解得到从小到大排列的特征值λk和对应特征向量ηk,k=1,2,…,M。
(2)对信道噪声功率和期望信号功率进行估计,根据特征值分布特点确定噪声的最大特征值λnoiseMax,其中λk>λnoiseMax的特征向量判作非噪声特征向量(干扰特征向量ηi和期望信号特征向量ηn),数目为Num1,剩余的特征向量判作噪声特征向量ηn,数目为Num2。

相关性能主要考察以下几个方面:
(1)零陷情况。通过方向图评估零陷是否对准干扰以及形成零陷的深度。
(2)信干噪比增益和信噪比增益。处理增益是下一步解调的关键,具体考虑不同干扰数目和强度、噪声强度、阵元数目,相关指标如下:
(13)
(14)
(3)误码率(Symbol Error Rate,SER)。误码率是衡量数据在规定时间内数据传输精确性的指标,公式如下:
误码率=传输中的误码/所传输的总码数×100%。
3 仿真分析
仿真采用8元均匀线阵,以线阵法线方向为参考方向,工作频率为2 GHz,阵元间隔为0.5个波长,各信号参数设置见表1。
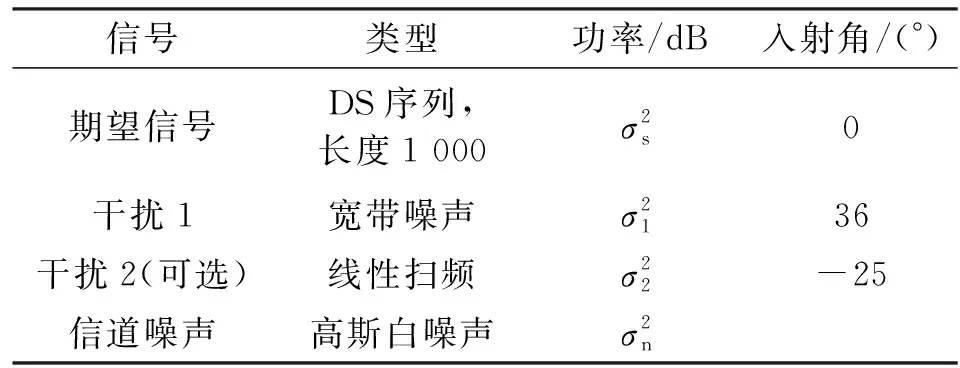
表1 仿真参数设置
3.1 仿真实验1

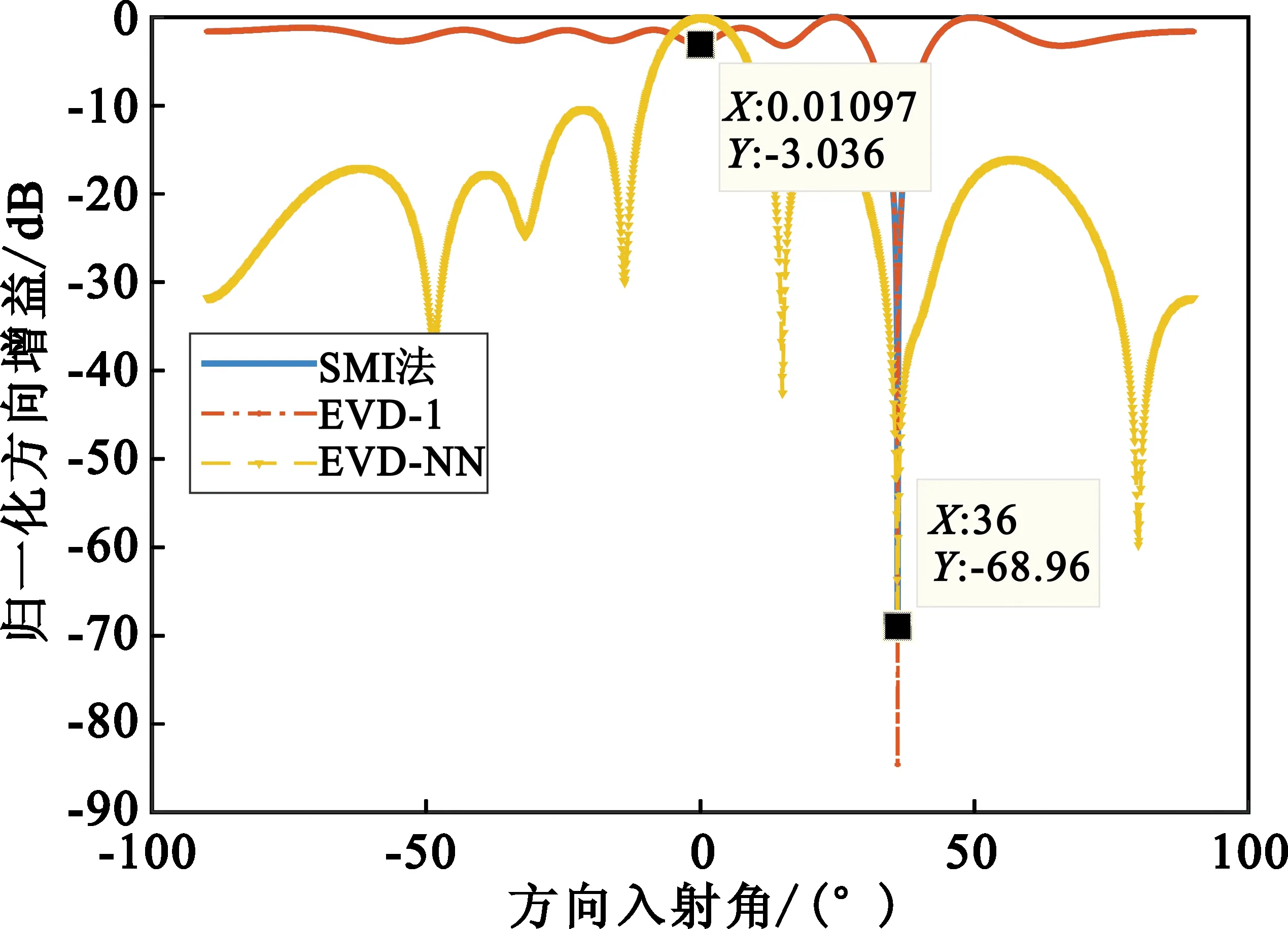
图3 实验1中三种算法方向图对比
3.2 仿真实验2


图4 实验2中三种算法方向图对比
3.3 仿真实验3


图5 实验3中三种算法方向图对比
3.4 仿真实验4
参数与实验1相同,天线阵元N=32,仿真结果如图6所示。与实验1相比,图6中三种算法形成零陷更深,角度分辨率更高。在期望方向,EVD-NN算法的主瓣宽度变小,为3.2°,增益比SMI算法和EVD-1算法高出约3 dB;同时,EVD-NN算法有较低的增益,第一旁瓣约-13 dB,方向图指向性更强。

图6 实验4中三种算法方向图对比
3.5 三种算法在不同环境下的抗干扰性能
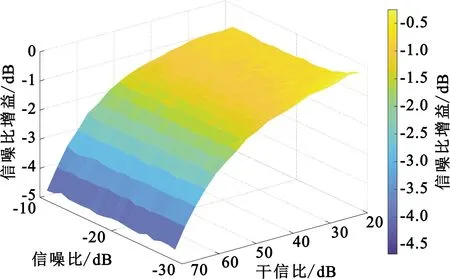
下面以信干噪比增益GSJNR和信噪比增益GSNR为评价指标,详细分析三种算法在不同环境下的抗干扰性能。
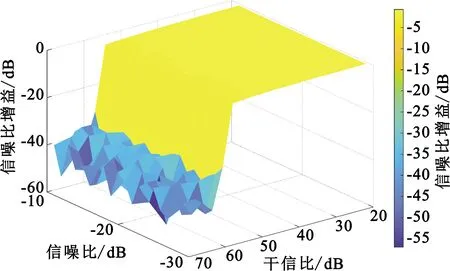
图7~9分别为三种算法的抗干扰性能仿真图,其中图7(a)、图8(a)和图9(a)信噪比增益指标中X轴按降序排列。由仿真结果可知,三种算法的GSNR不随信噪比变化,其中,SMI法和EVD-1法的GSNR恒小于0,EVD-NN法的GSNR比较稳定,当干信比小于等于56 dB时,EVD-NN法的GSNR均值为8.74,比前两者均值高出约9.6 dB;当干信比大于56 dB时,EVD-NN法的GSNR不稳定,但仍优于前两种算法。另外,从信干噪比增益看,图7(b)中,SMI法的GSJNR随信噪比、干信比增加而增加;图8(b)中,EVD-1法在低干扰下的GSJNR与SMI法接近,当干信比大于57 dB,算法失效;图9(b)中,EVD-NN法在同一信噪比下GSJNR比前两种算法高出约9.3 dB。信噪比为-15 dB时,GSJNR从38.3 dB增至51.8 dB;信噪比为-10 dB时,GSJNR从49.2 dB增至62.5 dB;当干信比大于60 dB,GSJNR变得不稳定,增长不明显。
(a) 信噪比增益

(b)信干噪比增益图7 SMI法抗干扰性能
(a)信噪比增益

(b)信干噪比增益图8 EVD-1法抗干扰性能
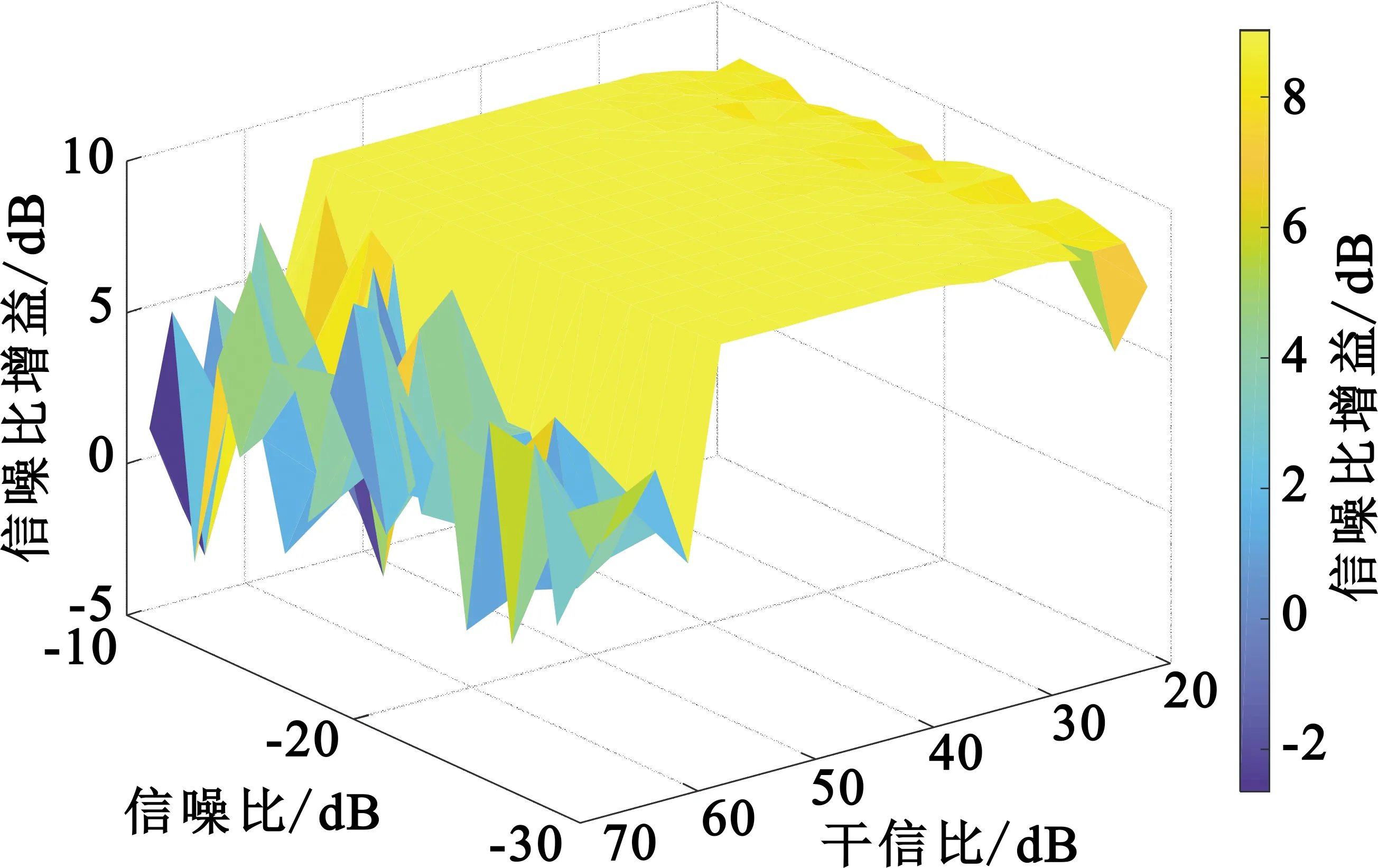
(a)信噪比增益
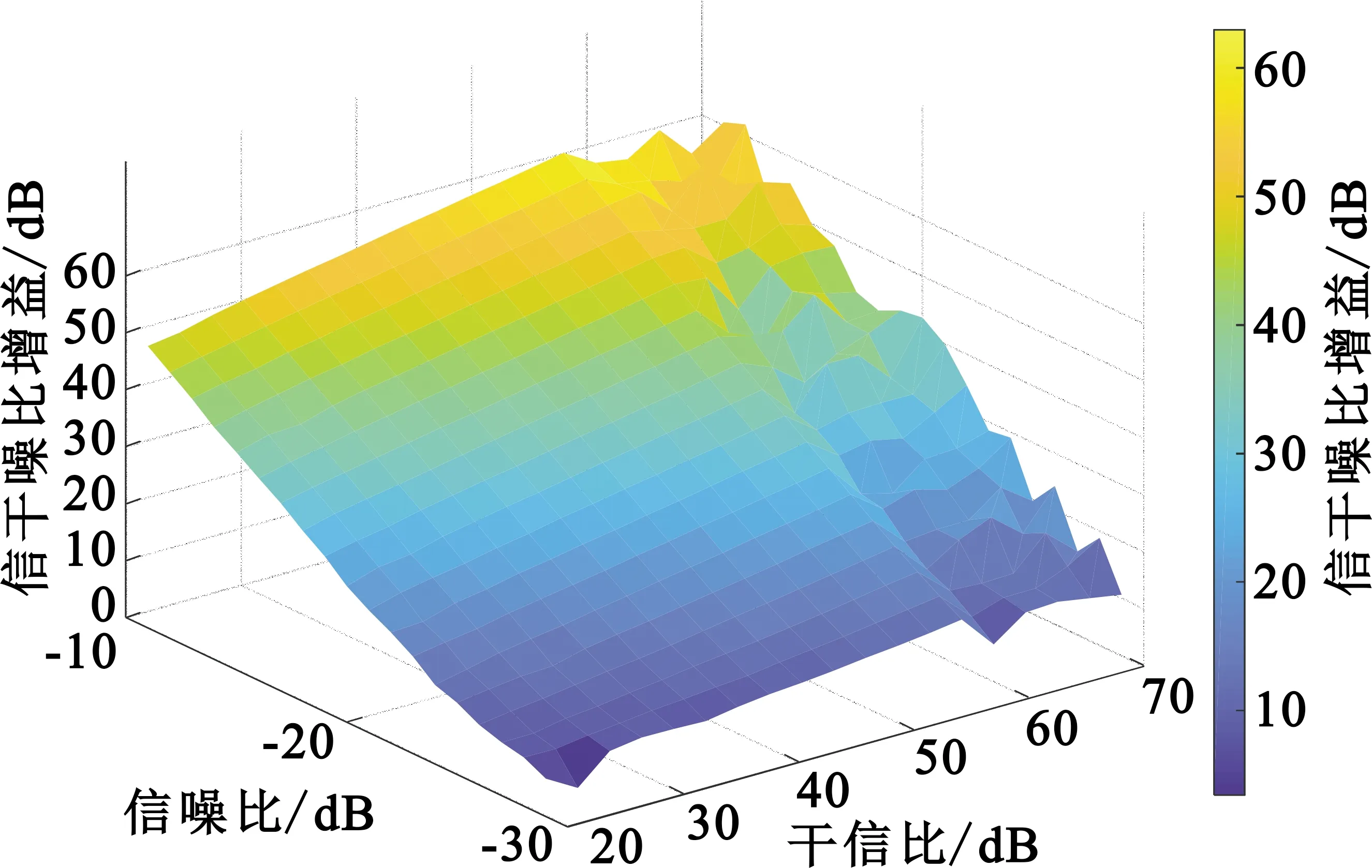
(b)信干噪比增益图9 EVD-NN法抗干扰性能
图10是不同信干比时系统误码率仿真图,其中实线代表信干比为-25 dB,虚线代表信干比为-55 dB。当信干比为-55 dB时,原始信号误码率约为0.75,SMI法误码率从0.58降到5×10-3,EVD-NN法误码率从0.42快速降到1×10-4;当信干比为-25 dB,原始信号误码率从0.59降到约0.21,SMI法误码率从0.58降到1.1×10-3,EVD-NN法误码率从0.51快速降到2×10-4。

图10 不同信干比时误码率
从零陷情况、处理增益(信干噪比增益GSJNR和信噪比增益GSNR)、误码率三个方面对三种算法进行的分析可知,较之于传统算法,EVD-NN法有明显优点,但从算法流程可知,以下两点是算法性能的关键,也是局限之处:
(1)获取准确的协方差估计,完成特征分解。快拍数少时,协方差估计不准确,算法性能显著下降,快拍数增多,算法实时性下降,同时对工程实现的硬件要求也变高。经仿真可知,算法所需快拍数与具体的天线阵元数、信号(期望信号与干扰)总数目、信号功率有关。
3.6 仿真实验5

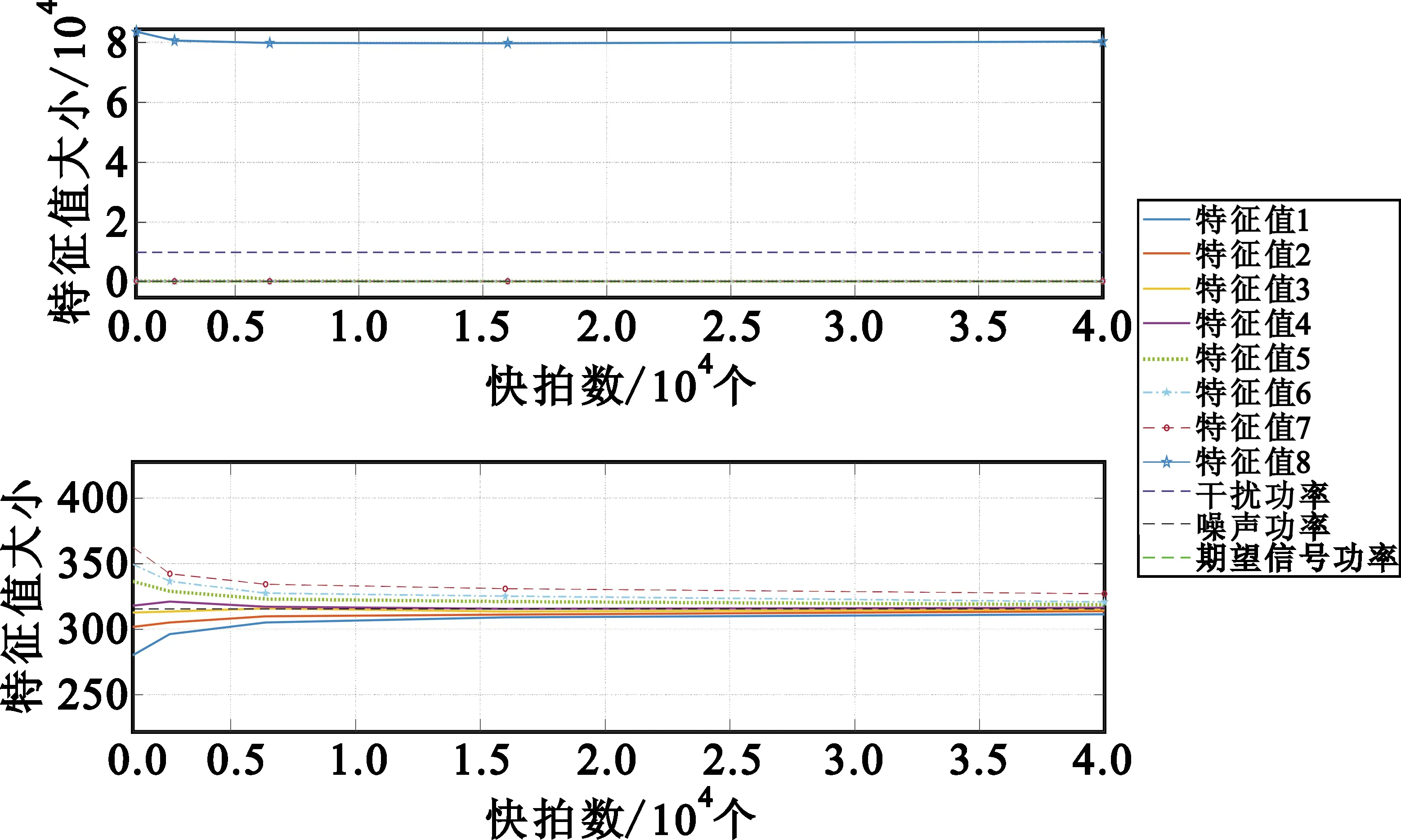
图11 快拍数不同时各特征值(从小到大排序)的收敛情况
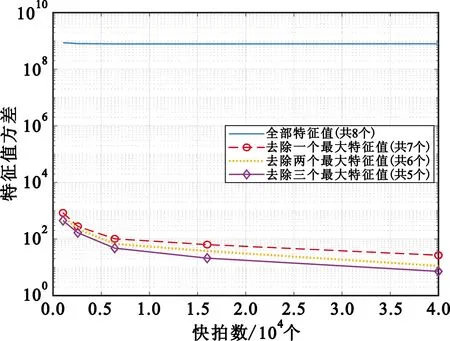
图12 快拍数不同时信道估计下各特征值的方差变化
图13中第1条曲线即为传统PI算法,第2、3、4条曲线分别代表假设期望信号对应特征值λ5、λ6、λ7时的方向图,可以发现此时零陷基本对准强干扰,最大增益指向偏离期望方向0.2°~0.4°,具体处理增益见表2。
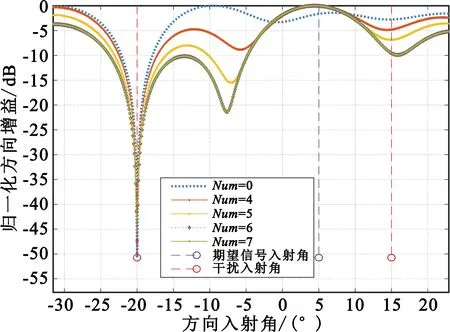
图13 EVD-NN法对舍去的噪声特征向量个数的敏感性

表2 仿真实验5相关数据
由表2可知,Num等于4、5、6、7时,EVD-NN算法的GSJNR和GSNR比传统PI算法(Num等于0)高,Num等于6、7时性能最佳,小于6时开始下降,Num等于5、4时,处理增益分别下降1.2 dB和2.7 dB。
综合上述分析可得,EVD-NN算法改善了信噪比恶化现象,能较稳定地提升信干噪比增益和信噪比增益,其提升效果随着天线阵元、干扰功率、输入信噪比增加而提高,有利于降低误码率,在强干扰来向形成较深零陷;SMI算法存在信噪比恶化现象,在强干扰来向形成较深零陷,信干噪比有所改善;EVD-1算法存在信噪比恶化现象,在弱干扰来向也准确形成较深零陷,整体性能与SMI法相近,但EVD-NN算法的性能依赖于高准确度的协方差估计以及能否正确区分噪声、非噪声特征向量,不便于工程实现。综上,本文提出的EVD-NN算法工作范围更广,具有稳定的、更高的信干噪比增益和信噪比增益,方向图具有指向性,有较低的旁瓣,性能更好。
4 结束语
针对传统功率倒置阵存在信噪比恶化的问题,本文分析了MMSE准则下最优权值矢量与协方差矩阵对应特征值的关系,从公式推导发现噪声特征向量是信噪比恶化的主要原因。在此基础上提出一种基于矩阵重组的功率倒置改进算法,通过特征值分布特点,舍去噪声特征向量求得新的最佳权值矢量。仿真实验表明,与传统SMI法和相关改进算法相比,本文算法对干扰强度和噪声强度适应范围更广,具有更高信号处理增益,在干信比为50 dB时,获得信干噪比和信噪比增益比前两种算法均高出约9.6 dB。同时,方向图主瓣指向期望信号,有较低的旁瓣,抗干扰性更强。
但是,本文提出的EVD-NN算法有局限性,要求样本协方差估计准确度较高。如何更有效可靠地区分噪声、非噪声向量,避免算法性能下降,可结合机器学习等方法进一步研究。
猜你喜欢
科技视界(2022年26期)2023-01-16
雷达与对抗(2022年1期)2022-03-31
国防科技大学学报(2020年1期)2020-02-07
舰船电子工程(2018年1期)2018-02-07
通信学报(2016年8期)2016-11-24
舰船电子对抗(2015年4期)2015-03-25
弹箭与制导学报(2015年1期)2015-03-11
电子与信息学报(2014年12期)2014-06-02
单片机与嵌入式系统应用(2014年7期)2014-03-24
铁路通信信号工程技术(2014年3期)2014-02-28