
基于核函数和方向估计的多目标跟踪方法*
2021-03-05 08:11谢志鹏卢一相高清维
传感器与微系统 2021年2期
谢志鹏,卢一相,高清维,孙 冬,鲍 华
(安徽大学 电气工程与自动化学院,安徽 合肥 230601)
0 引 言
多目标跟踪(multi-object tracking,MOT)实现了可视化监控、智能交通导航、人机界面等许多高水平的计算机视觉任务。多目标跟踪需要处理存在的问题(如外观的变化[1],动态灯光和场景[2]),目标间的相互遮挡[3,4],同时定位目标,等等。总的来说,多目标跟踪方法大致可以分为两类:基于判别模型的跟踪方法和基于生成模型的跟踪方法。对于基于判别模型[2~5]的方法,通常采用目标检测算法来实现定位。同时,许多方法也采用了跨多帧的数据关联技术来识别所有目标,避免了混淆。例如,Vasuhi S等人[5]提出通过寻找具有最大边界的最优分类超平面来定位所有目标的位置。采用反向扫描多假设跟踪(1BMHT)策略,实现了数据关联操作。相比之下,基于生成模型的方法[6,7]通常利用搜索区域中的匹配算法来确定目标的位置。例如:Chang C等人[7]提出的一种用于视频中多目标跟踪的核化粒子滤波器,利用核函数对后验概率密度函数进行连续估计,并根据估计核密度的梯度对粒子进行分配,得到最优定位。除了定位外,为了避免遮挡导致跟踪性能的下降,常利用滤波器来预测被遮挡目标在遮挡过程中的运动轨迹。
本文提出了一种基于核函数和方向估计的多目标跟踪算法。利用颜色直方图结合核函数建立目标模型。最后,通过计算预构建模型与搜索目标模型之间的海林格距离确定目标位置。
1 目标表示与相似度计算
将目标建模为一个在某个特征空间中的具有m个直条的核密度估计直方图,那么N个对象可以表示为
(1)
在随后的帧中,位于yj位置的候选目标被表示为
(2)


(3)

设{xj,i}i=1…nh为当前帧中第j个目标的像素位置,nh为像素个数,第i个候选目标的中心坐标位置为yj。通过使用相同的核函数k(x),每个候选目标位置的概率为
(4)
核函数k的定义为
(5)
式中r为像素点到区域中心的距离。
引入具有度量结构的相似度函数海林格距离来评价目标模型与候选目标之间的相似度。利用两个离散分布可以计算出海林格距离
H((yj),j)=1-ρ((yj),j)
(6)
其中
ρ((yj),j)=∑mu=1u(yj)j,u
(7)
式中ρ为和之间的Bhattacharyya系数。现在查找目标位置的任务转换为最小化式(6)中定义的距离的问题,这等价于最大化式(7)中的Bhattacharyya系数。
2 目标定位方法与遮挡处理
2.1 定位方法
通过研究目标在相邻帧中的位置,可以得到目标在前一帧中的运动方向,如图1(a)所示。进而确定当前帧的近似方向和目标在下一帧中的位置范围(图1(b)),这极大地减小了目标搜索的范围。

图1 跟踪目标的方向获取和估计示意
在视频中,目标的运动方向可以由一个角度来表示,这个角度可以通过目标在相邻帧中的位置来计算。定义(xj,k,yj,k)和(xj,k+1,yj,k+1)分别为目标j在前一帧和当前帧的中心坐标,那么这个角度为
(8)
可知,下一帧目标位置的区域应受当前帧中角度∠α的限制。在不失一般性的前提下,假设角度的偏差为ε,则实际角度范围为
∠αj,k-ε≤∠αj,k+1≤∠αj,k+ε
(9)
为了确定偏差ε,本文提出了一种类似于下降法中的线性搜索策略,在新一帧中寻找合适的ε。首先,为每一帧分配固定偏差εf和Δε步长 。然后求解以下优化问题,求出实际偏差
(10)

2.2 遮挡处理
本文提出了一种在跟踪过程中通过改变被遮挡像素的权重来降低遮挡对跟踪的影响的方法。通过分析两个目标的位置(图2),得到属于互遮挡块的像素点的位置。然后,对遮挡目标建立临时的外观模型,其中遮挡像素的权重设置为0,即

图2 两个目标之间局部遮挡的整个过程示意
(11)

2.3 跟踪算法
基于方向估计和核函数的多目标跟踪算法流程
初始化阶段:

跟踪阶段:
在后续帧中执行:
1)根据式(9)计算当前帧中每个目标的运动角度范围;
3)通过式(10)获得最大参数ρ(k+1(yj),j);
5)根据式(8)计算∠αj,k+1;
6)k=k=1,切换到下一帧,返回步骤1。
输出:目标的位置yj,j=1…N。
3 实验与分析
在实验中,选择RGB颜色空间作为特征空间,量化为16×16×16直条。设置参数εf=20,Δε=2。
在第一个实验中(图3),将球员75、球员97和足球初始化为要跟踪的目标。目标的初始位置和特征信息被标记为三个矩形区域,它们的大小分别为56×63,60×63,49×34。实验结果表明本文提出的算法跟踪性能良好。从图3(c)~(e)看出,当足球被球员的手阻挡时,足球的跟踪没有丢失,这表明该算法在抗遮挡方面具有很好的性能。
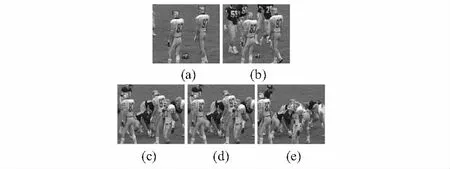
图3 第一次实验的跟踪结果
为了比较本文提出的方法与一些优越的跟踪算法。分别将基于粒子滤波[9]的多目标跟踪算法、基于均值漂移[6]的多目标跟踪算法和本文提出的算法应用到同一视频序列中。基于粒子滤波的跟踪器需要在目标周围采集样本,然后通过计算样本分布的平均值来估计目标位置。也就是说,样本的数量对跟踪器的精度有很大的影响。如果样本数量不足,跟踪精度会下降。如图4(a)~(d),女士并没有完全被框包围,这是因为样本不足导致对目标位置的估计不准确。如果用太多的样本来计算位置来提高精度,计算速度则会有所下降。基于均值漂移的跟踪器在初始帧获取目标模型后,通过均值漂移的方法获取下一帧的目标位置。该方法的跟踪性能同样容易受到目标周围环境变化的影响。如图4(e)~(h),在第125帧中,由于两个目标的接近,三个目标中的两个目标的跟踪状态下降。观察图4(i)~(l),可以发现本文提出的算法在位置估计方面比粒子滤波跟踪器和均值漂移跟踪器具有更高的精度。

图4 多个行人测试序列跟踪效果
基于粒子滤波、均值漂移和所提出算法的跟踪器得到的海林格距离值如图5所示。从图中可以看出,提出的方法获得的目标位置的海林格距离比粒子滤波跟踪器和均值漂移跟踪器的海林格距离值小,即本文作者所提出的方法的精度更高。
此外,图5也证明了本文算法也很好地解决了遮挡问题,即在相同遮挡程度下,得到的海林格距离值也小得多。当两个目标非常接近时,基于均值漂移的跟踪器会受到较大的影响。这种情况从图4(d)中可以清楚地看到,视频帧右侧的两个人的跟踪被混淆了。同样,属于这两个目标的样本的质量会降低,从而影响基于粒子滤波的多目标跟踪器的跟踪精度。然而,在相同的情况下,本文提出的方向估计结合遮挡处理机制产生了很好的效果(图4(a))。

图5 第二次实验中海林格距离值的变化
本文实验还对所提出的跟踪器的稳定性进行了测试,三种跟踪器对包含不同类型目标的30多个视频进行了测试,平均跟踪成功率见表1。

表1 三种算法在目标跟踪中的精度 %
4 结束语
本文在颜色特征的基础上,利用核函数构造目标的特征模型并利用目标的运动方向来估计目标位置的范围,进而确定目标位置。为了提高跟踪精度,本文提出了一种权值策略来解决遮挡问题。将该算法与相关文献的算法比较实验表明,该方法在多目标跟踪方面取得了更加优异的跟踪性能。
猜你喜欢
太阳能(2022年3期)2022-03-29
太阳能(2020年3期)2020-04-08
21世纪(2019年12期)2019-12-18
杂文月刊(2019年14期)2019-08-03
当代工人·精品C(2019年2期)2019-05-10
祝您健康·文摘版(2018年4期)2018-05-14
计算机应用与软件(2017年7期)2017-08-12
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
学生天地·小学低年级版(2014年11期)2015-01-17
数学年刊A辑(中文版)(2014年4期)2014-10-30
